







 本文探讨了轮式机器人的姿态稳定控制问题,包括开放环控制中的非完整路径规划及闭合环控制中的状态反馈控制。特别介绍了极坐标系下稳定控制器的设计方法。
本文探讨了轮式机器人的姿态稳定控制问题,包括开放环控制中的非完整路径规划及闭合环控制中的状态反馈控制。特别介绍了极坐标系下稳定控制器的设计方法。
definition
The posture stabilizationposture \ stabilizationposture stabilization problem is to stabilize the vehicle to a desired final posture starting from any initial posture (posturepostureposture means both the position and the orientation of a mobile robot from base).
difficulty
Posture stabilization problem of wheeled mobile robot is more difficult than the tracking problem in the sense that nonholonomic systems with more degrees of freedom than control inputs cannot be stabilized by any static state feedback control law.
method
The approached for this problem can be largely divided into two categories:
- open-loop control —— the nonholonomic path-planning
In the nonholonomic path-planning, authors assume inputs(v,ϕ)(v, \phi)(v,ϕ) in kinematic model as a function of time, then modify the assumed function to fit their purpose.
However, it is generally difficult to find or modify inputs v,ϕv, \phiv,ϕ which transfer a car-like mobile robot to a desired posture and a tracking control should be designed because it is only a path-planning. - closed-loop control —— state feedback control
The most important merit of state feedback control in posture stabilization is that it can be directly used as a controller without any path-planning.
Polar Coordinate-based Stabilizer
It is assumed that, without loss of generality, that the desired configuration is the origin qd=[0,0,0]T\mathbf{q}_{d} = [0, 0, 0]^{T}qd=[0,0,0]T
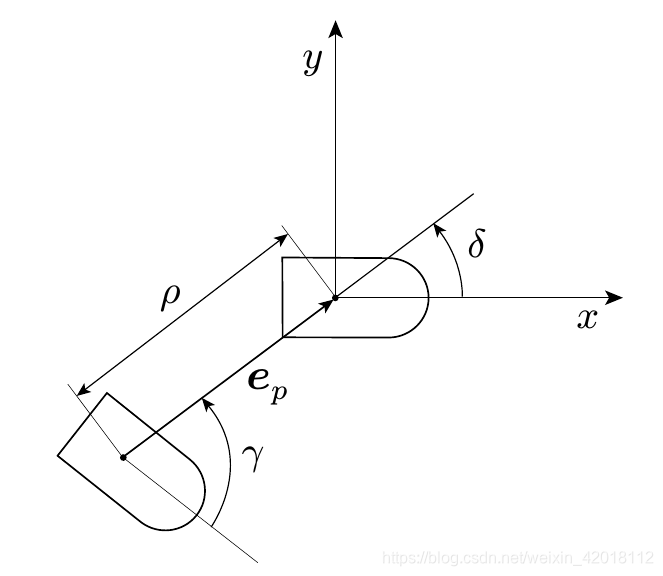
Formulate the problem in polar coordinate:
state representation:
ρ=x2+y2\rho = \sqrt{x^{2} + y^{2}}ρ=x2+y2 γ=Atan2(y,x)−θ+π\gamma = Atan2(y,x) - \theta + \piγ=Atan2(y,x)−θ+π δ=γ+θ\delta = \gamma + \thetaδ=γ+θ
kinematic model:
ρ˙=−v cosγ\dot{\rho} = -v \ cos\gammaρ˙=−v cosγ γ˙=sinγρv−w\dot{\gamma} = \frac{sin\gamma}{\rho}v -wγ˙=ρsinγv−w δ˙=sinγρv\dot{\delta} = \frac{sin \gamma}{\rho} vδ˙=ρsinγv

















 4914
4914

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









