







- 解析法(Analytical Solution)
顾名思义是用代数或几何方法直接求解。通常随着自由度上升,求得解析解的难度也越来越大,对于冗余机械臂还需要从几个解中选择合适的解。这种方法通常用在特定几何结构的机械臂,并且有特定的关节位置求解顺序。下由于解析解法不具有通用性,我们后面不再详述。 - 优化法(Optimization-based Solution)
是把问题转化为一个优化问题求数值解。用数学语言说,就是把求
q=f−1(x)q=f−1(x)
的问题,转化为
“求关节位置q,使实际end effector位置x与正运动学算出的end effector位置f(q)之间的差最小”的问题:
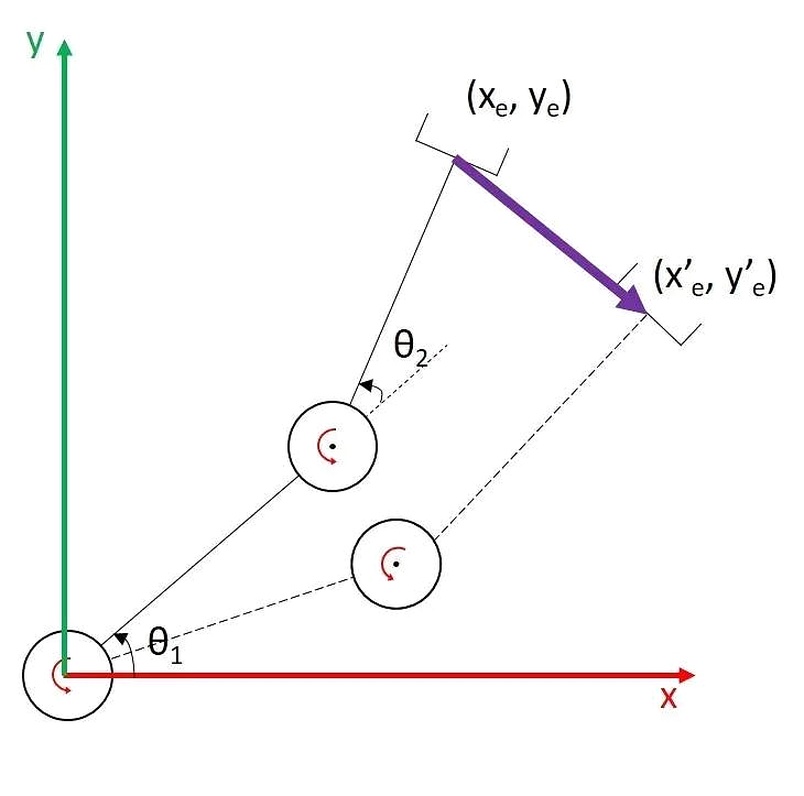
现在我们需要end effector从图中(xe, ye)沿紫色直线移动到(x’e, y’e),但你需要控制关节位置实现这一点。现在你可以有几种思路——
- 只求起点和终点对应的关节位置,直接对这两处关节位置进行线性插值求得关节运动轨迹——这样虽然省了很多计算量,但end effector不大可能沿着直线走。
- 把这条直线插入很多很多中间点,每一个点都求出对应的关节位置,然后控制每一个关节按着这一系列的关节位置走(就是我们前面说的解析/优化解法)。
- 还是把这条直线插入很多很多中间点,但如果点与点的间隔足够小、运动时间足够短,我们就可以在每一点用雅可比矩阵求逆来求得当前关节位置的变化——换个角度讲,我们也可以设定end effector沿这条直线的运动速度,用雅可比矩阵求逆求得关节速度,直接控制关节的运动速度而不是位置。
第三种方法的控制框图:
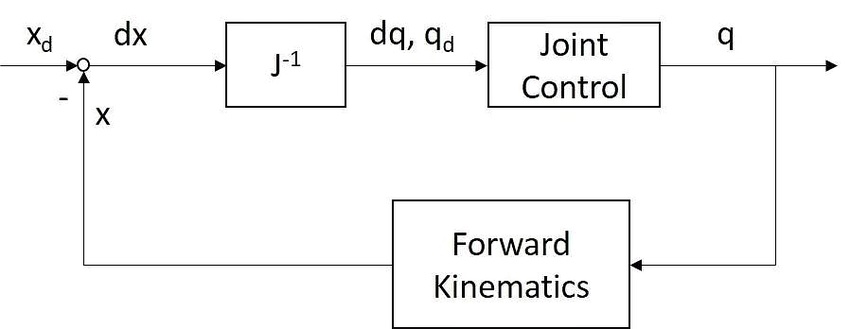
Joint control则是你把你计算出来的qdqd送到每一个关节的控制器中(比如最简单的舵机);这些控制器最终把各个关节控制到位置qq(好的控制器,大部分情况和qdqd应当非常接近)。
通常你设置一个xdxd,控制器需要走几遍这个控制回路才能将dx降到接近0(让x逼近xdxd),因此这个方法也被称为迭代法。

















 2392
2392

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









