### PointNet++ 算法原理
PointNet++ 是基于 PointNet 的改进版本,旨在解决 PointNet 对局部结构建模能力不足的问题。通过引入分层特征提取方法,PointNet++ 能够更好地捕捉点云中的局部几何特性以及不同尺度下的空间关系[^1]。
具体来说,PointNet++ 使用一种层次化的神经网络架构来逐步聚合来自多个尺度的信息。其核心思想是在不同的区域范围内对点集进行采样和分组,并利用 PointNet 提取每组内的局部特征。随后,这些局部特征被逐级传播到更高层以形成更高级别的表示形式。这种方法不仅保留了 PointNet 的优点——即能够处理无序输入并保持不变性,还增强了模型对于复杂形状的理解能力[^1]。
#### 主要组成部分
- **Set Abstraction (SA)**: 这一模块负责执行下采样操作并将邻近点划分为若干子集合;接着运用 PointNet 来获取每个子集合的特征向量。
- **Feature Propagation**: 此部分用于将高层次学到的知识反向传递至低分辨率层面,从而补充细节信息丢失的部分。
---
### PointNet++ 实现代码示例
以下是使用 PyTorch 编写的简化版 PointNet++ 架构:
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class PointNetSetAbstraction(nn.Module):
def __init__(self, npoint, radius, nsample, in_channel, mlp, group_all):
super(PointNetSetAbstraction, self).__init__()
self.npoint = npoint
self.radius = radius
self.nsample = nsample
self.mlp_convs = nn.ModuleList()
self.mlp_bns = nn.ModuleList()
last_channel = in_channel
for out_channel in mlp:
self.mlp_convs.append(nn.Conv2d(last_channel, out_channel, 1))
self.mlp_bns.append(nn.BatchNorm2d(out_channel))
last_channel = out_channel
self.group_all = group_all
def forward(self, xyz, points):
"""
Input:
xyz: input points position data, [B, C, N]
points: input points data, [B, D, N]
Return:
new_xyz: sampled points position data, [B, C, S]
new_points_concat: sample points feature data, [B, D', S]
"""
import pointnet2_utils
B, C, N = xyz.shape
S = self.npoint
if not self.group_all:
fps_idx = pointnet2_utils.furthest_point_sample(xyz.transpose(1, 2).contiguous(), S).long() # [B, npoint]
new_xyz = index_points(xyz.permute(0, 2, 1), fps_idx).permute(0, 2, 1) # [B, C, S]
idx = pointnet2_utils.query_ball_point(self.radius, self.nsample,
xyz.permute(0, 2, 1),
new_xyz.permute(0, 2, 1)).int()
grouped_xyz = index_points(xyz.permute(0, 2, 1), idx).permute(0, 3, 1, 2) # [B, C, S, nsample]
grouped_points = index_points(points.permute(0, 2, 1), idx).permute(0, 3, 1, 2)
grouped_points -= new_xyz.unsqueeze(-1)
for i in range(len(self.mlp_convs)):
conv = self.mlp_convs[i]
bn = self.mlp_bns[i]
grouped_points = F.relu(bn(conv(grouped_points)))
new_points = torch.max(grouped_points, dim=-1)[0] # [B, D', S]
else:
new_xyz = None
pooled_points = torch.mean(points, dim=2, keepdim=True).expand([-1,-1,S])
new_points = pooled_points
return new_xyz, new_points
def index_points(points, idx):
device = points.device
B = points.shape[0]
view_shape = list(idx.shape)
view_shape[1:] = [1] * (len(view_shape) - 1)
repeat_shape = list(idx.shape)
repeat_shape[0] = 1
batch_indices = torch.arange(B, dtype=torch.long).to(device).view(view_shape).repeat(repeat_shape)
new_points = points[batch_indices, :, idx[..., :]]
return new_points
class PointNetPPClsSSG(nn.Module):
def __init__(self, num_classes):
super(PointNetPPClsSSG, self).__init__()
self.sa1 = PointNetSetAbstraction(npoint=512, radius=0.2, nsample=32, in_channel=3+3, mlp=[64, 64, 128], group_all=False)
self.sa2 = PointNetSetAbstraction(npoint=128, radius=0.4, nsample=64, in_channel=128 + 3, mlp=[128, 128, 256], group_all=False)
self.sa3 = PointNetSetAbstraction(npoint=None, radius=None, nsample=None, in_channel=256 + 3, mlp=[256, 512, 1024], group_all=True)
self.fc1 = nn.Linear(1024, 512)
self.bn1 = nn.BatchNorm1d(512)
self.drop1 = nn.Dropout(0.4)
self.fc2 = nn.Linear(512, 256)
self.bn2 = nn.BatchNorm1d(256)
self.drop2 = nn.Dropout(0.4)
self.fc3 = nn.Linear(256, num_classes)
def forward(self, xyz):
B, _, _ = xyz.shape
l1_xyz, l1_points = self.sa1(xyz, None)
l2_xyz, l2_points = self.sa2(l1_xyz, l1_points)
l3_xyz, l3_points = self.sa3(l2_xyz, l2_points)
x = l3_points.view(B, 1024)
x = self.drop1(F.relu(self.bn1(self.fc1(x))))
x = self.drop2(F.relu(self.bn2(self.fc2(x))))
x = self.fc3(x)
return x
```
此代码片段展示了如何构建一个简单的分类器 `PointNetPPClsSSG`,其中包含了三个 Set Abstraction 层次。每一层都通过对点云的不同范围进行采样和聚集来提取特征[^1]。
---
### TensorFlow 版本概述
虽然上述实现了 PyTorch 中的 PointNet++,但在 TensorFlow 上也可以找到类似的实现库,比如 Keras 或者其他开源项目提供了完整的解决方案。由于 TensorFlow 更倾向于静态图模式,在实际部署过程中可能需要额外注意性能优化问题[^2]。
如果希望尝试 TensorFlow 实现,则推荐查阅官方文档或者社区贡献的相关资源链接作为起点。
---





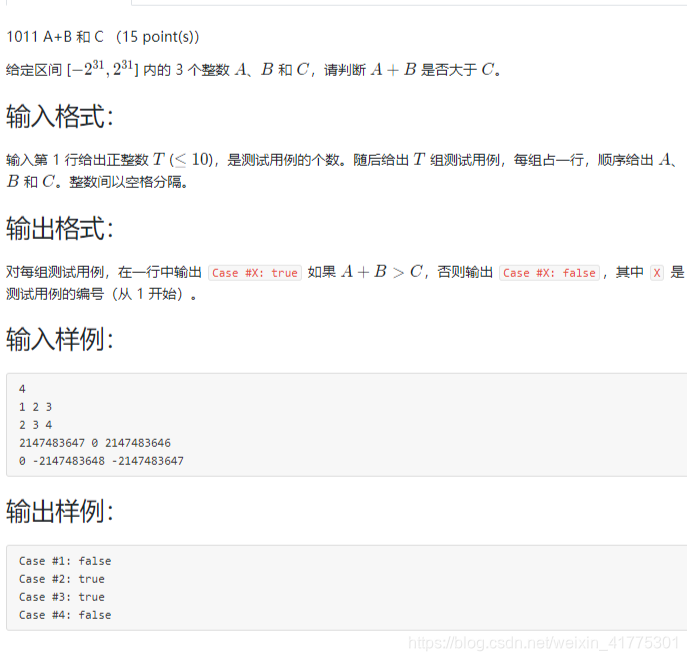
 本文解析了一道Python编程竞赛题目,通过输入多个整数并判断它们的和是否大于第三个整数,展示了基本的条件判断和循环结构应用。适合初学者理解和掌握Python基本语法。
本文解析了一道Python编程竞赛题目,通过输入多个整数并判断它们的和是否大于第三个整数,展示了基本的条件判断和循环结构应用。适合初学者理解和掌握Python基本语法。
 868
868

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























