问题描述:
把一个图像投影变换到另一个图像的指定位置上
code
#include <opencv2/opencv.hpp>
#include "opencv2/imgproc/imgproc_c.h"
#include <eigen3/Eigen/Core>
#include <eigen3/Eigen/Dense>
#include <iostream>
using namespace cv;
using namespace std;
struct userdata{
Mat im;
vector<Point2f> points;
};
void mouseHandler(int event, int x, int y, int flags, void* data_ptr)
{
if ( event == EVENT_LBUTTONDOWN )
{
userdata *data = ((userdata *) data_ptr);
circle(data->im, Point(x,y),3,Scalar(0,255,255), 5, CV_AA);
imshow("Image", data->im);
if (data->points.size() < 4)
{
data->points.push_back(Point2f(x,y));
}
}
}
int main( int argc, char** argv)
{
// Read in the image.
Mat im_src = imread("ad.jpg");// 输入广告图片
Mat im_ad = imread("ad.jpg");
Size size = im_src.size();
// Create a vector of points.
// y x --- v u 的存储
vector<Point2f> pts_src;
pts_src.push_back(Point2f(0,0));// 左上
pts_src.push_back(Point2f(size.width - 1, 0));// 右上
pts_src.push_back(Point2f(size.width - 1, size.height -1));// 右下
pts_src.push_back(Point2f(0, size.height - 1 ));// 左下
// Set data for mouse handler
Mat im_temp = im_ad.clone();
userdata data;
data.im = im_temp;
//show the image
imshow("Image", im_temp);
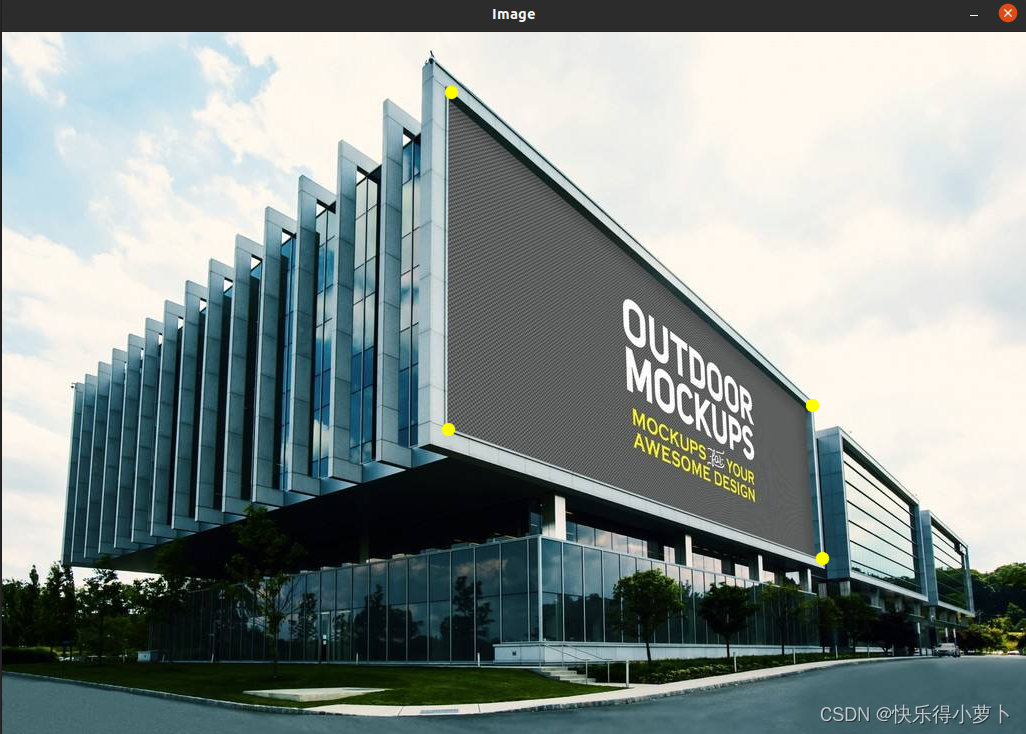
cout << "Click on four corners of a billboard and then press ENTER" << endl;
cout << "请按照左上 右上 右下 左下的顺序点击" << endl;
setMouseCallback("Image", mouseHandler, &data);
//注意鼠标旋转顺序和原图定义角点顺序要一致
while(1){
waitKey(0);
if(data.points.size() != 4){
data.points.clear();
cout << "please re click" << endl;
}else{
break;
}
}
std::cout << "开始计算H矩阵" << std::endl;
// 使用dlt计算H矩阵 reference slam book p172
Eigen::Matrix3d H_Mat;
Eigen::Matrix<double, 8, 8> A_Mat;
A_Mat.setZero();
Eigen::Matrix<double, 8, 1> B_Mat;
B_Mat.setZero();
for(int i = 0; i < 4; ++i){
double u1 = pts_src[i].x;
double v1 = pts_src[i].y;
double u2 = data.points[i].x;
double v2 = data.points[i].y;
A_Mat.block<1, 8>(i*2, 0) << u1, v1, 1, 0, 0, 0, -u1 * u2, -v1 * u2;
A_Mat.block<1, 8>(i*2+1, 0) << 0, 0, 0, u1, v1, 1, -u1 * v2, -v1 * v2;
B_Mat(i*2, 0) = u2;
B_Mat(i*2+1, 0) = v2;
}
// (A^T * A)^-1 A^T * b 最小
Eigen::Matrix<double, 8, 1> x = (A_Mat.transpose() * A_Mat).inverse() * A_Mat.transpose() * B_Mat;
H_Mat << x(0,0), x(1,0), x(2,0), x(3,0), x(4,0), x(5,0), x(6,0), x(7,0), 1;
// checkH
for(int i = 0; i < 4; i++){
Eigen::Vector3d ptsPoint(pts_src[i].x, pts_src[i].y, 1);
Eigen::Vector3d dataPoint = H_Mat * ptsPoint;
Eigen::Vector3d targetPoint(data.points[i].x, data.points[i].y, 1);
dataPoint = dataPoint/dataPoint[2];
// cout << "target: " << targetPoint.transpose() << " || used: " << ptsPoint.transpose() <<
// " ||now:" << dataPoint.transpose() << "||" << endl;
if((dataPoint - targetPoint).norm() > 15){
cout << "!!! error H_mat" << endl;
return 1;
}
}
// 用H
Size sizeTarget = im_ad.size();
for(int x = 0; x < size.width; x++){
for(int y = 0; y < size.height; y++){
Eigen::Vector3d ptsPoint(x, y, 1);
Eigen::Vector3d dataPoint = H_Mat * ptsPoint;
dataPoint = dataPoint/dataPoint[2];
// in picture
if(dataPoint[0] < 0) continue;
if(dataPoint[0] >= sizeTarget.width) continue;
if(dataPoint[1] < 0) continue;
if(dataPoint[1] >= sizeTarget.height) continue;
im_ad.at<Vec3b>(dataPoint[1], dataPoint[0])[0] = im_src.at<Vec3b>(y, x)[0];
im_ad.at<Vec3b>(dataPoint[1], dataPoint[0])[1] = im_src.at<Vec3b>(y, x)[1];
im_ad.at<Vec3b>(dataPoint[1], dataPoint[0])[2] = im_src.at<Vec3b>(y, x)[2];
}
}
// Display image.
imshow("Image", im_ad);
waitKey(0);
return 0;
}
run
step1
step2
step3

开源链接
gitee链接

























 2219
2219

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









