




算法面试之手推逻辑回归
最新推荐文章于 2024-05-02 15:17:56 发布
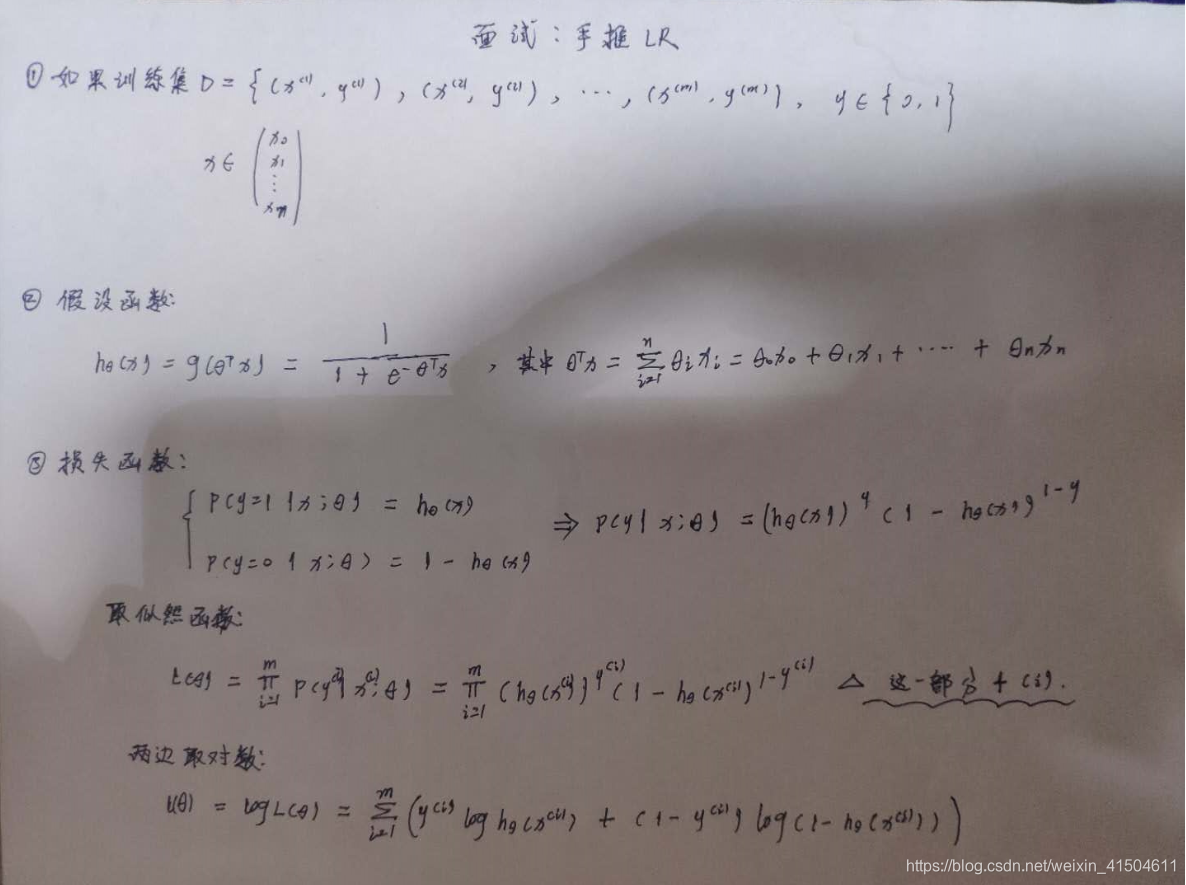
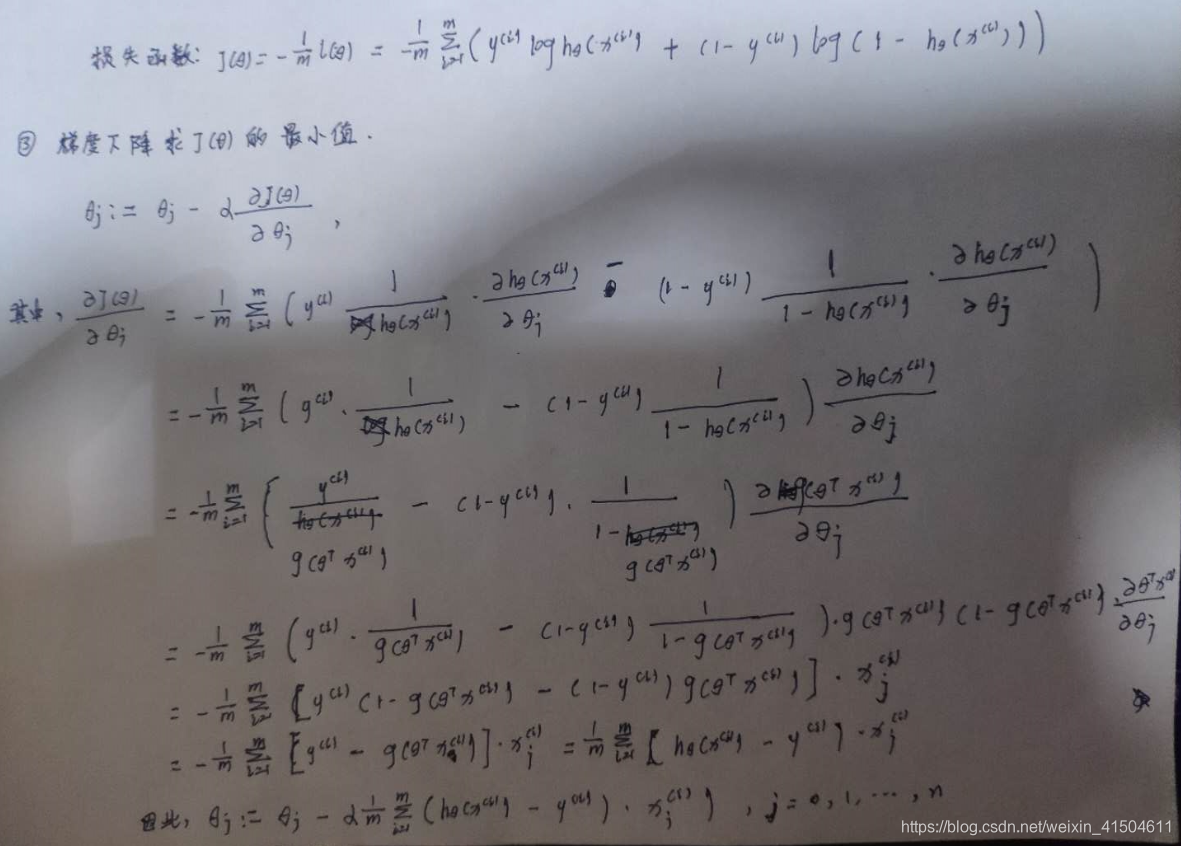
 博客围绕面试中手推回归回归展开,但具体内容缺失。回归回归可能涉及线性回归、逻辑回归等相关知识,在面试中手推这些回归算法能考察面试者对算法原理的理解。
博客围绕面试中手推回归回归展开,但具体内容缺失。回归回归可能涉及线性回归、逻辑回归等相关知识,在面试中手推这些回归算法能考察面试者对算法原理的理解。
博客围绕面试中手推回归回归展开,但具体内容缺失。回归回归可能涉及线性回归、逻辑回归等相关知识,在面试中手推这些回归算法能考察面试者对算法原理的理解。
博客围绕面试中手推回归回归展开,但具体内容缺失。回归回归可能涉及线性回归、逻辑回归等相关知识,在面试中手推这些回归算法能考察面试者对算法原理的理解。
 2万+
381
2万+
381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























