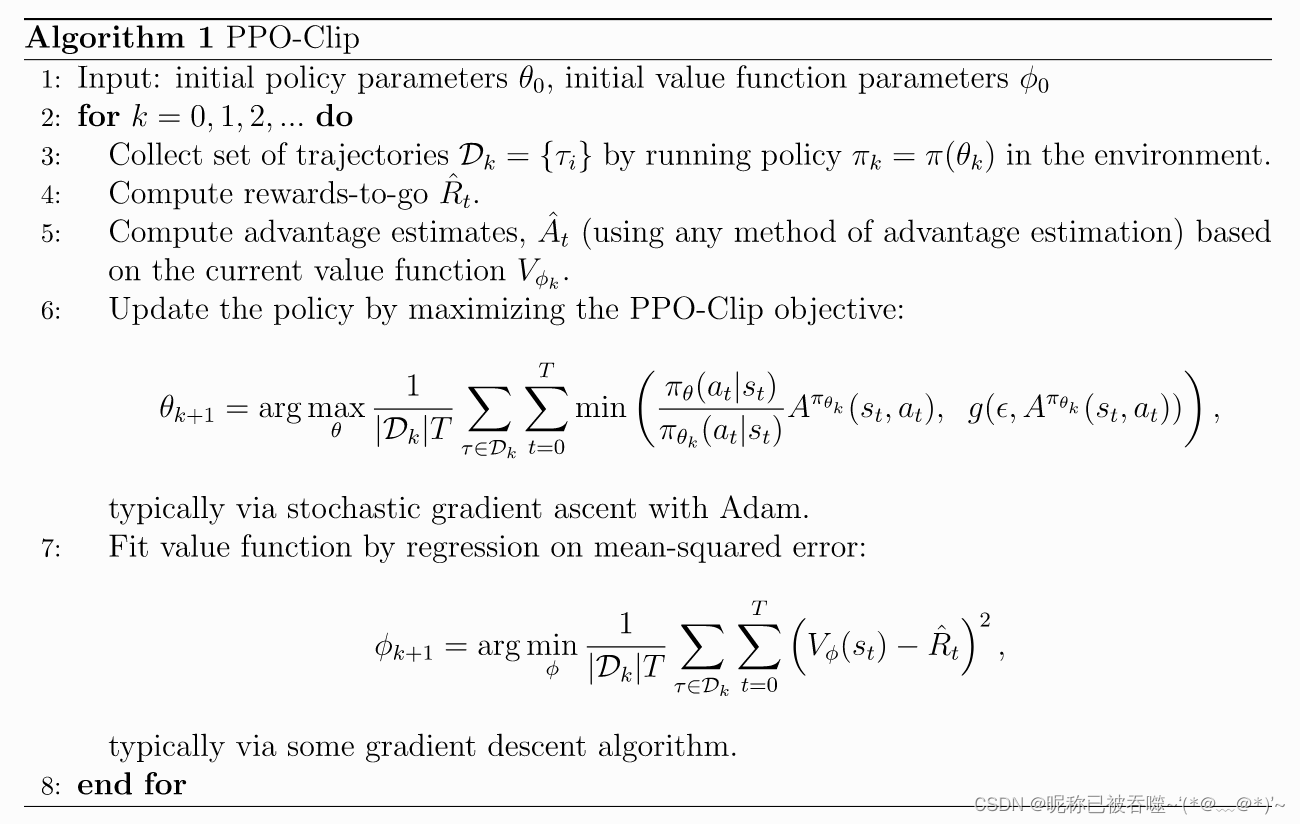
算法流程
代码
import matplotlib.pyplot as plt
import tensorflow as tf
import numpy as np
import gym
import copy
def build_actor_network(state_dim, action_dim):
model = tf.keras.Sequential([
tf.keras.layers.Dense(units=128, activation='relu'),
tf.keras.layers.Dense(units=action_dim, activation='softmax')
])
model.build(input_shape=(None, state_dim))
return model
def build_critic_network(state_dim):
model = tf.keras.Sequential([
tf.keras.layers.Dense(units=128, activation='relu'),
tf.keras.layers.Dense(units=1, activation='linear')
])
model.build(input_shape=(None, state_dim))
return model
class Actor(object):
def __init__(self, state_dim, action_dim, lr):
self.action_dim = action_dim
self.old_policy = build_actor_network(state_dim, action_dim)
self.new_policy = build_actor_network(state_dim, action_dim)
self.update_policy()
self.optimizer = tf.keras.optimizers.Adam(learning_rate=lr)
def choice_action(self, state):
po





 该代码示例展示了如何在Python中使用TensorFlow库构建和训练一个Actor-Critic模型来解决OpenAIGym的CartPole-v1环境。Actor网络用于选择动作,Critic网络估计状态值函数,通过强化学习更新策略。
该代码示例展示了如何在Python中使用TensorFlow库构建和训练一个Actor-Critic模型来解决OpenAIGym的CartPole-v1环境。Actor网络用于选择动作,Critic网络估计状态值函数,通过强化学习更新策略。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 797
797

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









