









 这篇博客介绍了如何将Livox采集的.lvx点云数据转换为.bag,再进一步转为.pcd格式。通过使用ros相关指令完成.lvx到.bag的转换,然后利用pcl_rosbag_to_pcd工具将.bag转换成.pcd。最后,利用CloudCompare软件将多个.pcd文件合并成一个文件,并调整Active参数为intensity以完成拼接操作。
这篇博客介绍了如何将Livox采集的.lvx点云数据转换为.bag,再进一步转为.pcd格式。通过使用ros相关指令完成.lvx到.bag的转换,然后利用pcl_rosbag_to_pcd工具将.bag转换成.pcd。最后,利用CloudCompare软件将多个.pcd文件合并成一个文件,并调整Active参数为intensity以完成拼接操作。
CloudCompare多个pcd文件的拼接为1个pcd
Livox采集的点云数据,初始格式为.lvx
第一步:.lvx转为.bag
在ws_livox目录下
roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:="/home/jl/****.lvx"
第二步:.bag转为.pcd
rosrun pcl_ros bag_to_pcd ***.bag /livox/lidar ./&&&&.pcd
每个bag转完后的文件夹里是一堆.pcd
简单的解决方法:用软件CloudCompare,软件自取
链接:https://pan.baidu.com/s/1uI2QVm_nUdGdJklD9XRNRQ
提取码:qany
–来自百度网盘超级会员V3的分享

打开文件夹,全选.pcd,打开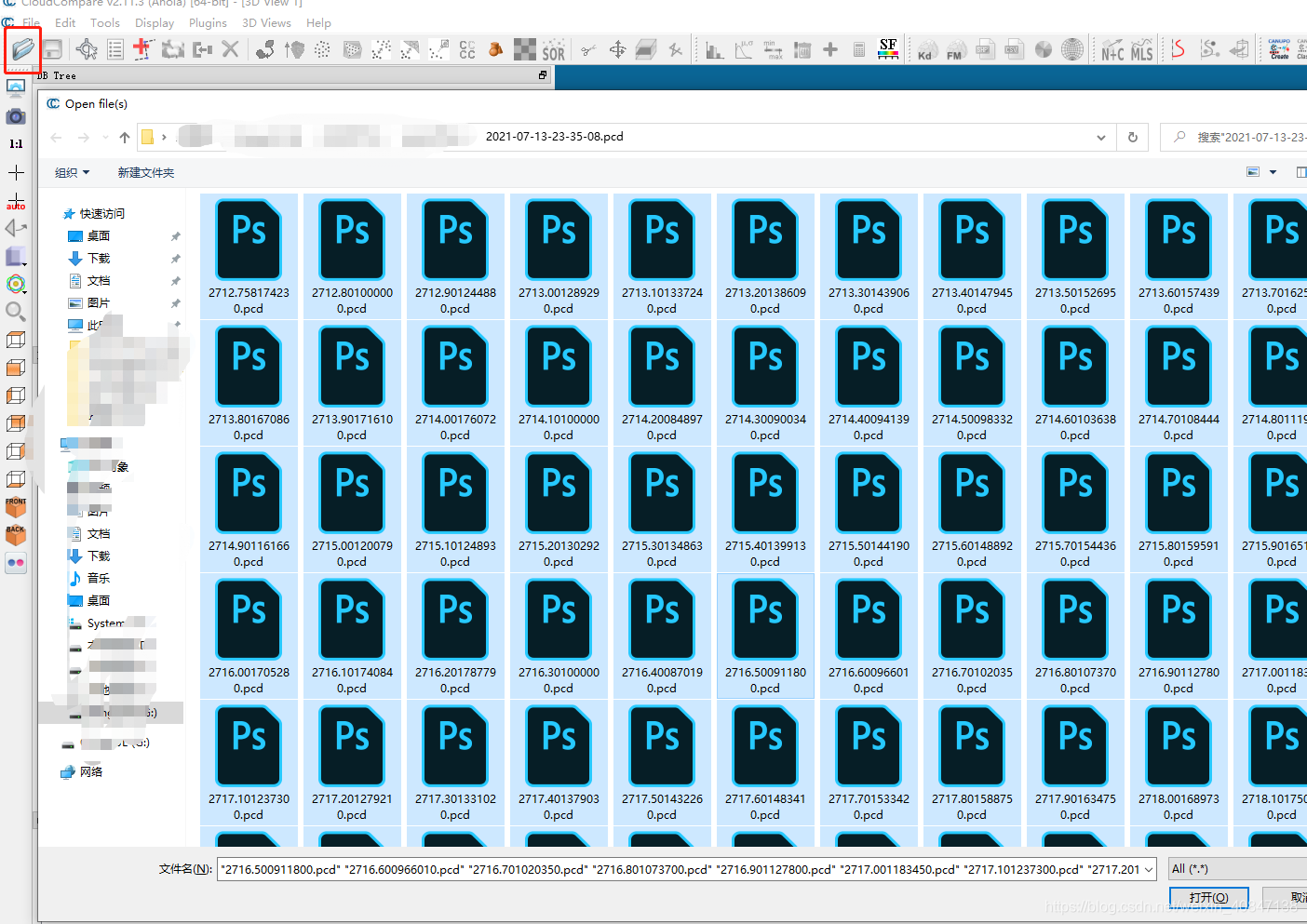
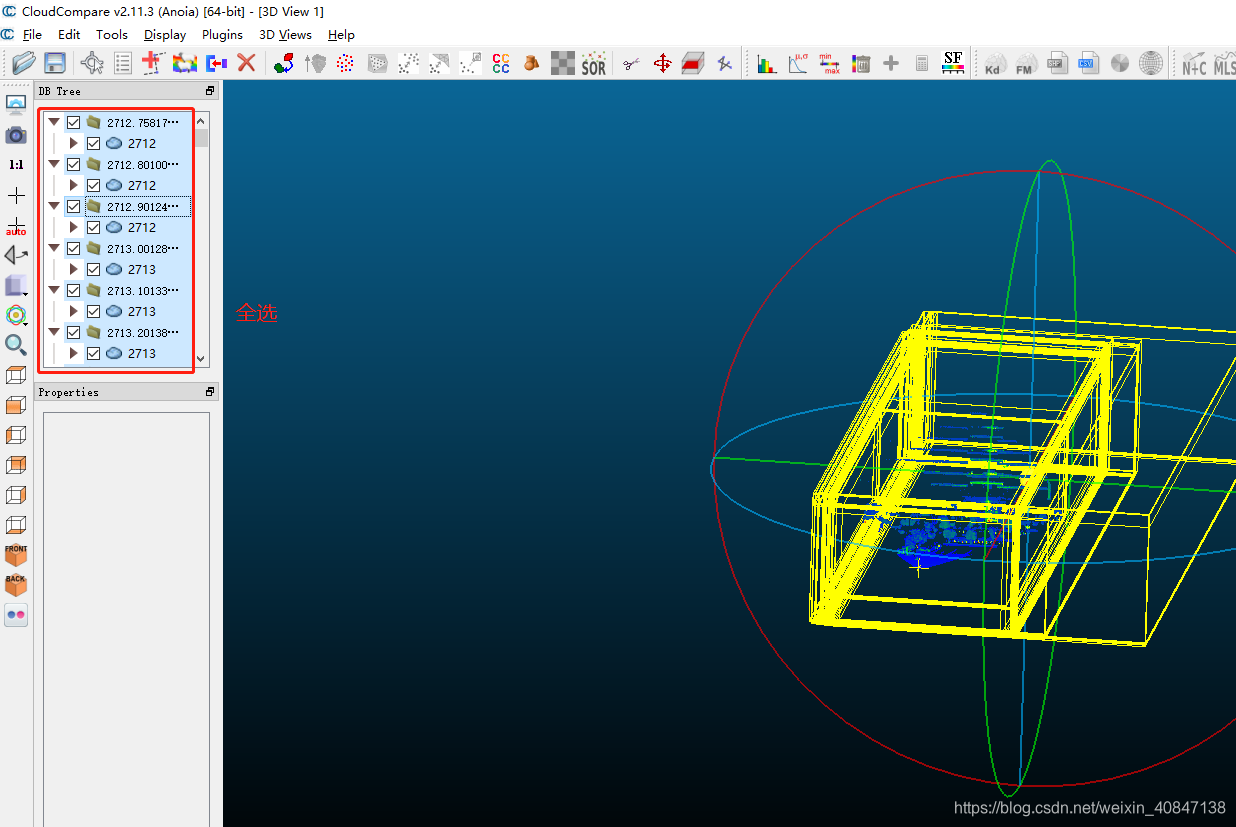
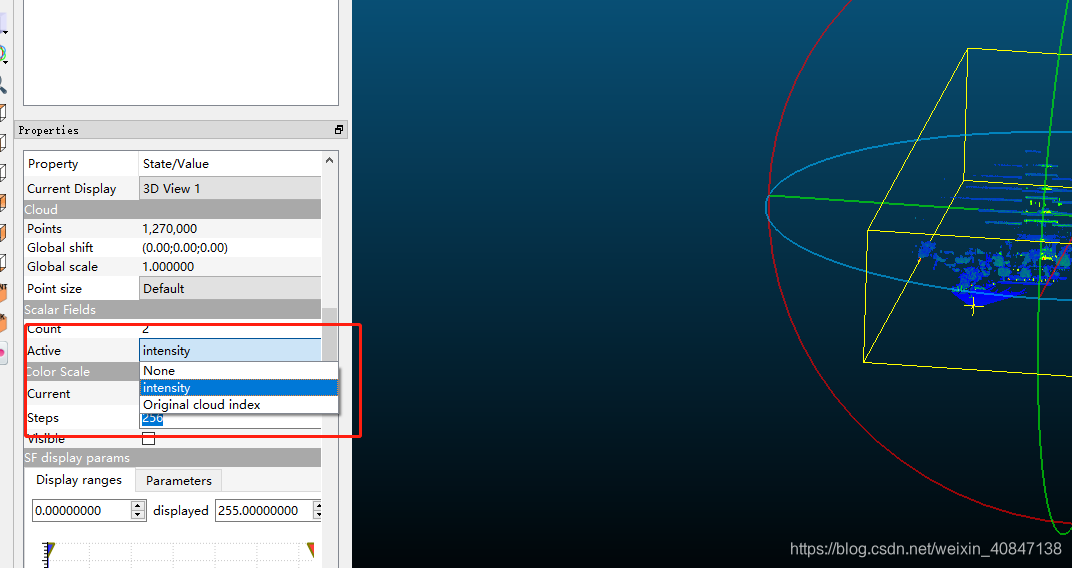
全选后,Edit——Merge(合并)——Yes
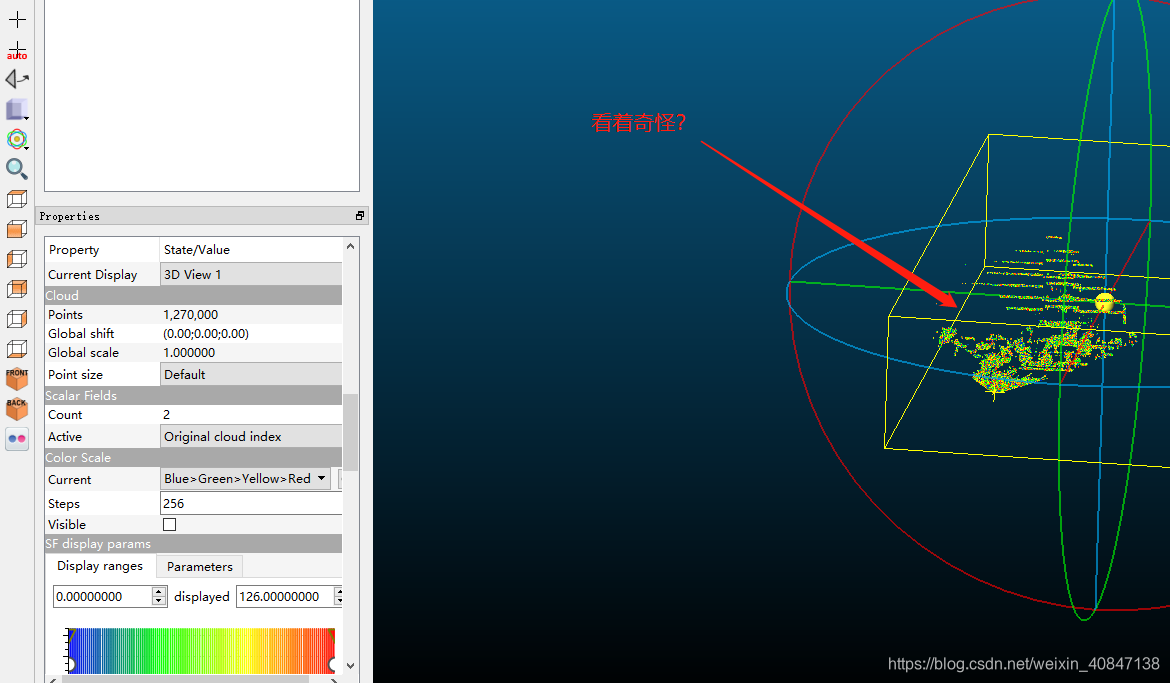
把Active改成intensity就好了

















 1431
1431

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









