









https://t.zsxq.com/sqiFa https://t.zsxq.com/sqiFa
https://t.zsxq.com/sqiFa
本文提出了一种新颖的规划方法,使用归一化流(NF)来编码专家风格的运动基元,同时提出了一种加速的碰撞检测框架,可以在运行模型之前从先验分布中拒绝样本,从而快速采样无碰撞轨迹。实验结果表明,该方法在随机障碍环境中与模型预测路径积分控制相当,并在死胡同环境中提高了退出率。
01 引言
本文提出了一个新颖的规划方法,利用归一化流(NF)来编码专家风格的运动基元。同时,本文还提出了一种加速的碰撞检测框架,可以在运行模型之前从先验分布中拒绝样本,从而快速采样无碰撞轨迹。选择NF作为生成器允许编码多样的多模态行为分布,同时保持与输入空间的平滑关系,这允许在NF输入上而不是输出上近似碰撞检查。在随机障碍环境中,本文展示了与模型预测路径积分控制相当的表现,并在死胡同环境中提高了退出率。
02 相关工作
本文提到,高速导航在障碍丰富的环境中仍然是一个重大挑战。传统的探索性运动规划和控制架构(例如快速探索随机树(RRT)变体)在竞争时间尺度上提供的解决方案质量有限。最近边缘处理技术的改进并未提高这一问题,因为搜索是顺序的。
03 问题表述
本文寻求产生一个框架,能够在高密度的障碍场中以高速进行导航。本文将车辆的初始位姿,一个运行成本函数J,一个障碍物地图
,以及一个确定状态
是否碰撞的碰撞检查函数
作为输入。目标是最小化运行成本函数
,并确保轨迹τ不发生碰撞(即
对于所有t)。
04 方法
首先收集一组专家风格的运动基元,然后训练一个NF
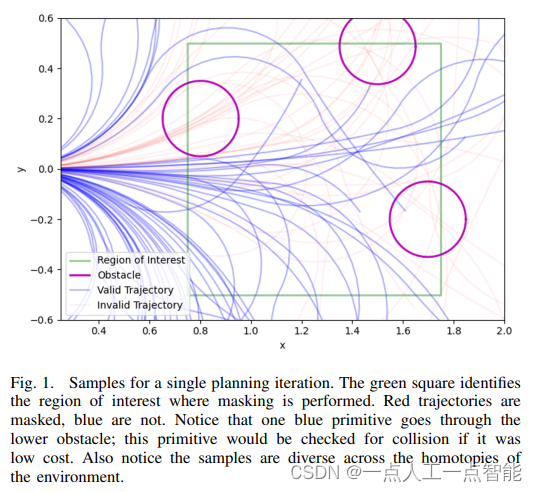
来捕获专家数据集的分布。在线生成归一化流后,我们建立一个掩码缓存,大致确定在给定地图的情况下先验分布中哪些样本将导致碰撞。在线,我们使用掩码缓存,仅在先验分布的样本偏向占据自由空间时,才将其通过NF模型。我们选择每个规划迭代中最佳的非碰撞基元,并使用低级控制器跟踪该基元,直到下一次规划迭代。
05 实验设置
为了建立专家数据集,我们通过遥操作一个轻微修改的MITRacecar平台,并收集了运动捕捉数据。然后,我们用最小二乘法拟合参数到每个子轨迹。我们选择了两层神经样条模型,每层有两个块和16个隐藏通道。
06 结果
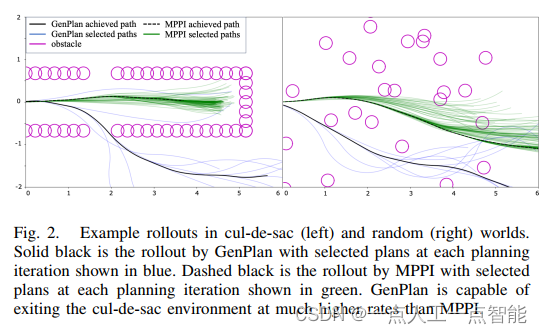
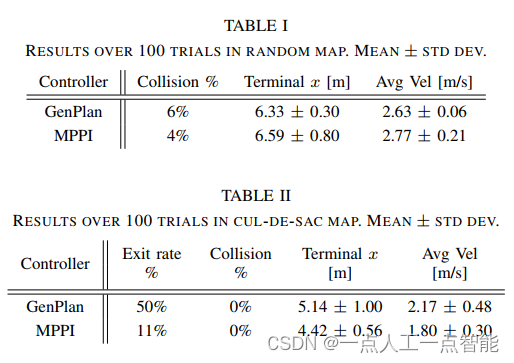
在随机障碍世界中,我们的控制器GenPlan与MPPI在正x进度和碰撞率上表现相当。在死胡同世界中,GenPlan的退出率远高于MPPI。
07 结论和未来工作
本文提出了一种规划框架,利用NF来采样专家风格的运动基元。基元采样通过在运行模型之前从先验分布中拒绝样本来加速,从而强烈地使采样产生多样性和无碰撞轨迹。本文展示了与MPPI的比较,在随机障碍环境中表现相当,但在死胡同环境中提高了退出率。


















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











