







功能介绍
该组件是对接收的激光雷达点云数据做预处理,主要实现点云过滤和坐标系转换两个功能。
注意,输入的激光雷达点云数据是由激光雷达驱动解析后发出的,激光雷达驱动的发送周期为100ms,为激光雷达旋转一圈的数据量。
点云过滤功能
- 滤除点云坐标中出现 nan 值的点(一般不会出现);
- 滤除点的距离值超过1km的点云(一般不会出现);
- 滤除车身旁边的点云,范围可在配置文件中设置;
- 滤除高于一定范围的点云,范围可在配置文件中设置;;
坐标系转换
这里涉及3个坐标系,分别是激光雷达自身坐标系、卫星导航系统组件坐标系、世界坐标系。
实现方法是:
- 先查询激光雷达坐标系到卫星导航系统组件坐标系的静态变换,即外参;
- 再查询卫星导航系统组件坐标系到世界坐标系动态变换;
- 最后把上述两个变换整合起来,就得到雷达自身坐标系到世界坐标系的动态变矩阵,从而实现将本地激光点云数据转换为世界坐标系下点云的数据。
核心代码解读
若您想了解更多关于此模块的内容,请参考上方与该文章配套的资源,里面含有源码详细的注释和打印,以方便大家理解 。
如何查询坐标变换
查询坐标变换的入口函数。
if (!lidar2world_trans_.GetSensor2worldTrans(lidar_query_tf_timestamp, &pose,
&pose_novatel)) {
out_message->error_code_ = apollo::common::ErrorCode::PERCEPTION_ERROR_TF;
AERROR << "Failed to get pose at time: " << lidar_query_tf_timestamp;
return false;
}
查询激光雷达坐标系到卫星导航系统组件坐标系的静态变换,即外参。函数第一次运行会走进该分支,后续会跳过,也就是整个上电周期只允许一次。正常执行的是 QueryTrans 函数,并且会返回true。
if (sensor2novatel_extrinsics_ == nullptr) {
// 传感器到卫星定位系统组件的坐标变换的外参是静态变换,函数第一次运行会走进该分支,后续会跳过
StampedTransform trans_sensor2novatel;
// 查询激光雷达(velodyne64)到卫星定位系统组件(novatel)的静态变换
if (!QueryTrans(
timestamp,
&trans_sensor2novatel,
sensor2novatel_tf2_frame_id_,
sensor2novatel_tf2_child_frame_id_)) {
return false;
}
sensor2novatel_extrinsics_.reset(new Eigen::Affine3d);
// 计算激光雷达到卫星导航系统的外参
*sensor2novatel_extrinsics_ = trans_sensor2novatel.translation * trans_sensor2novatel.rotation;
}
查询卫星导航系统组件坐标系到世界坐标系动态变换,正常执行的是 QueryTrans 函数,并且会返回true。
// 查询卫星定位系统组件(novatel)到世界坐标系(word)的坐标变换,这个坐标变换会随着定位的不同而不同
if (!QueryTrans(timestamp, &trans_novatel2world, novatel2world_tf2_frame_id_, novatel2world_tf2_child_frame_id_)) {
if (FLAGS_obs_enable_local_pose_extrapolation) {
if (!transform_cache_.QueryTransform(
timestamp, &trans_novatel2world, FLAGS_obs_max_local_pose_extrapolation_latency)) {
return false;
}
} else {
return false;
}
} else if (FLAGS_obs_enable_local_pose_extrapolation) {
transform_cache_.AddTransform(trans_novatel2world);
}
上述的两个查询函数,最终会落实到transform模块中的buffer.cc中的Buffer::canTransform成员函数。该成员函数中会执行下面语句:
bool retval = tf2::BufferCore::canTransform(target_frame, source_frame,
time.ToNanosecond(), errstr);
学过ROS的同学,就很容易明白最终通过tf2开源库做的查询。
请注意,若要最终查询到上述的两个变换,需要通过cyber_recorder命令回放sensor_rgb.record数据集,并且保证程序运行和回放数据集同时运行,以免查询不到。
对于3个坐标系之间的变换,用的是仿射变换,包括平移和旋转。这属于机器人学中的基础知识,感兴趣的同学可以自己动手查询一下。
效果展示
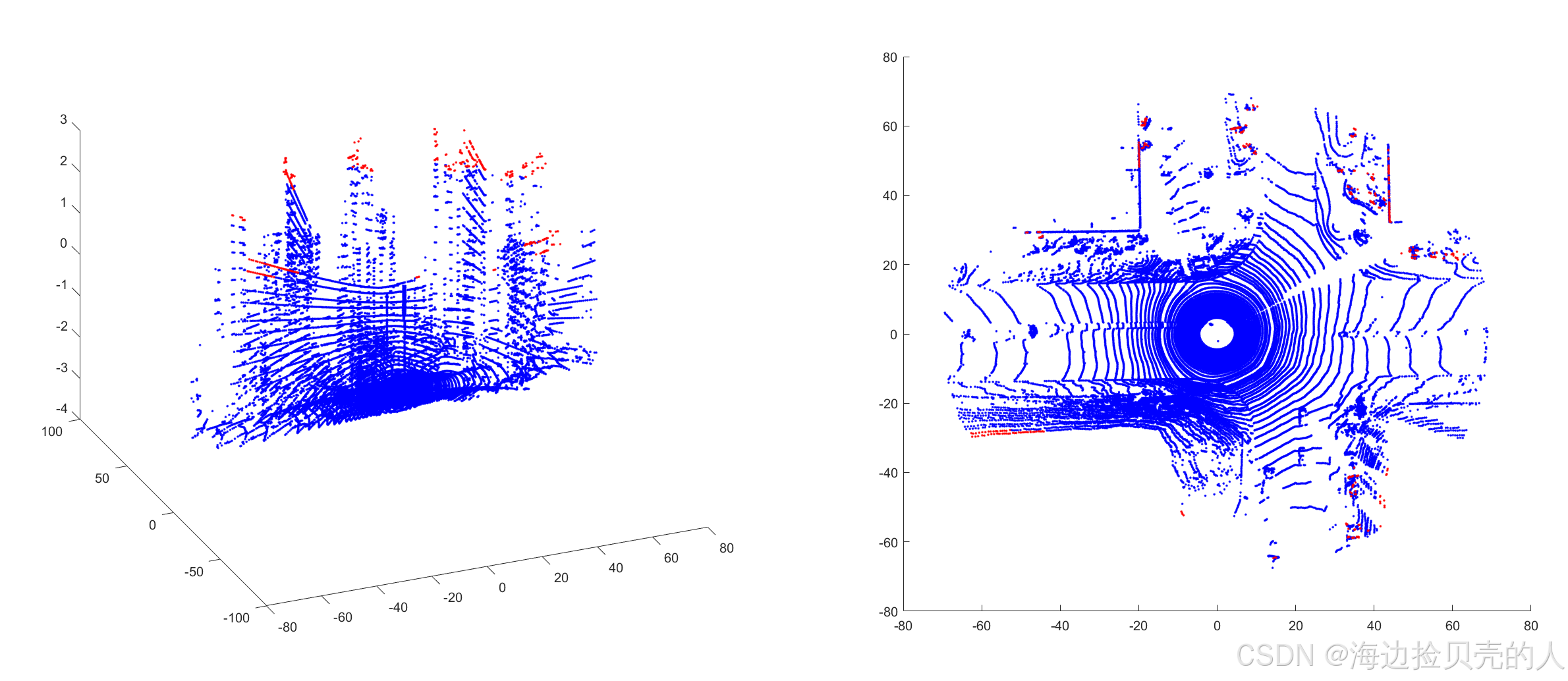
点云过滤效果
蓝色点为未滤除的点云,红色点为被滤除的点云。其中,左图为三维视图,右图为XY俯视图。
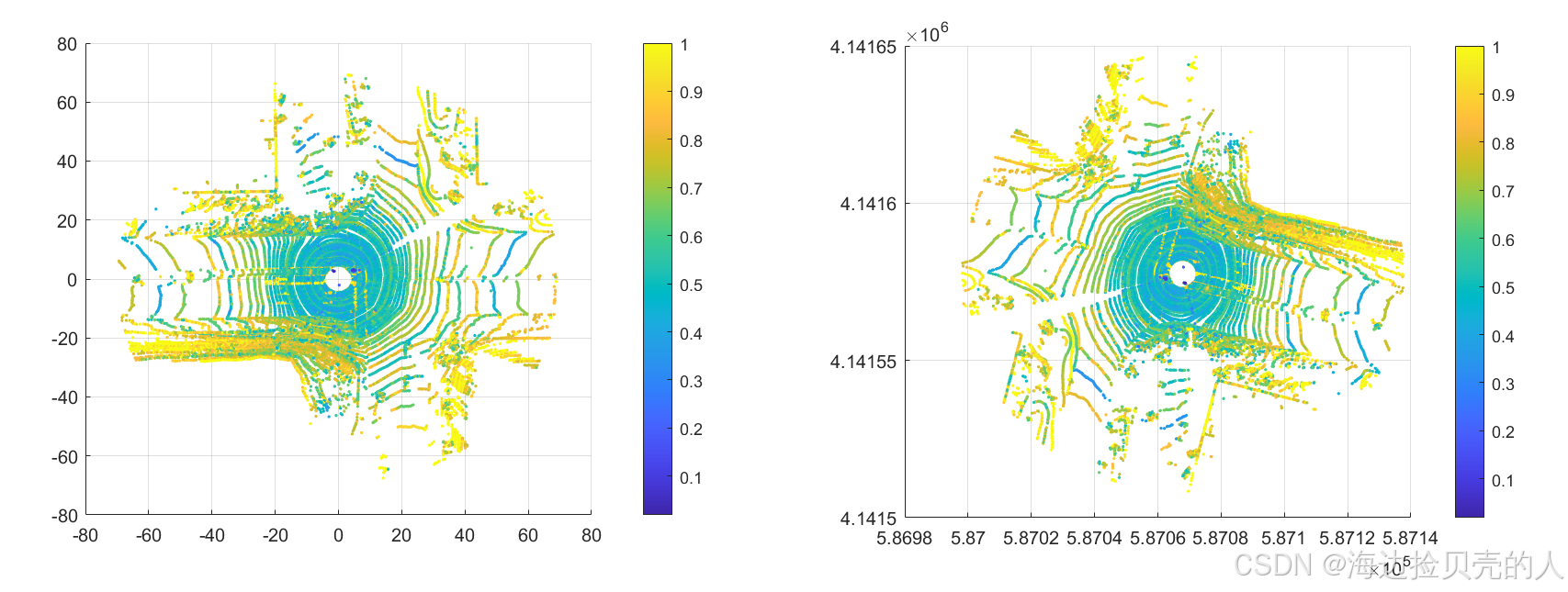
点云坐标系变换后效果
左图为雷达自身坐标系中一帧点云数据,右图为转换到世界坐标系后的点云数据。通过对比可见,实际上将点云进行了平移和旋转。另外用不同的颜色代表不同的反射强度,1为最大反射率。


















 1139
1139

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











