






这部分完全看五行缺帅wangshuailpp的博客.感谢大佬的博客.
首先计算的是残差的计算模型
论文中使用的是单位半球体的相机观测残差,是一个宽视野鱼眼或者全方位相机。相机的残差模型如下公式17所示:
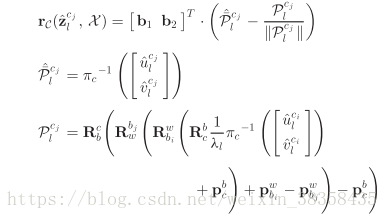
大佬的推导用的是针孔相机模型
针孔相机模型:
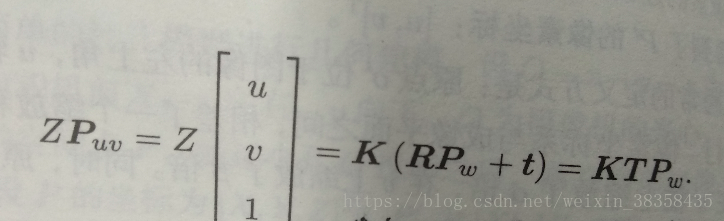
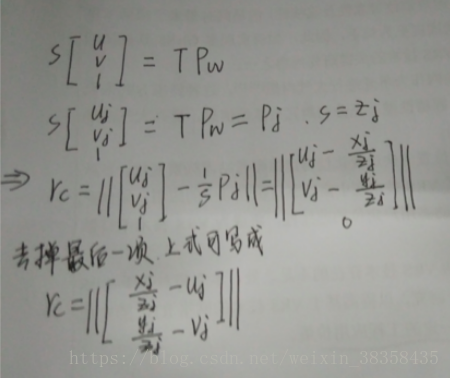
VINS选取的是j帧图像的残差计算模型。 另外:由feature_tracker传过来的像素点坐标吸收了内参K且做了归一化,因此是吸收内参的归一化图像坐标。即内参K包含在坐标中.
 (图直接复制转载文章博主的)
(图直接复制转载文章博主的)
然后就是雅克比的计算啦.
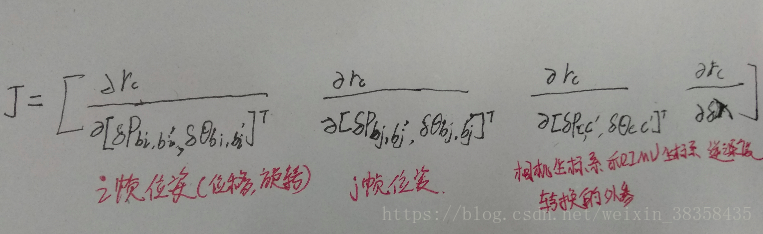
先看J[0]
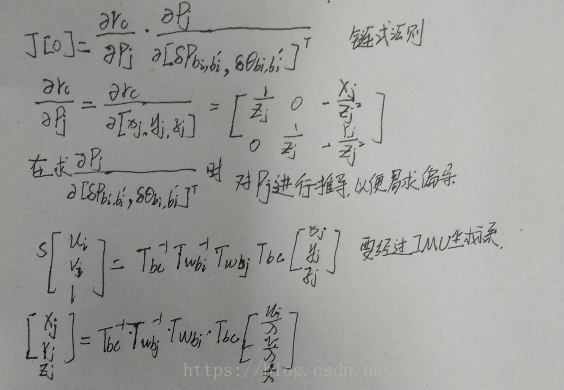
 ps:最后一行 没有偏导符号
ps:最后一行 没有偏导符号
rc为像素误差是2维,位姿如果是用四元数表示旋转将是7维,会得到2*7的雅克比矩阵;如果用旋转矩阵表示,将会得到2*6的雅克比矩阵.
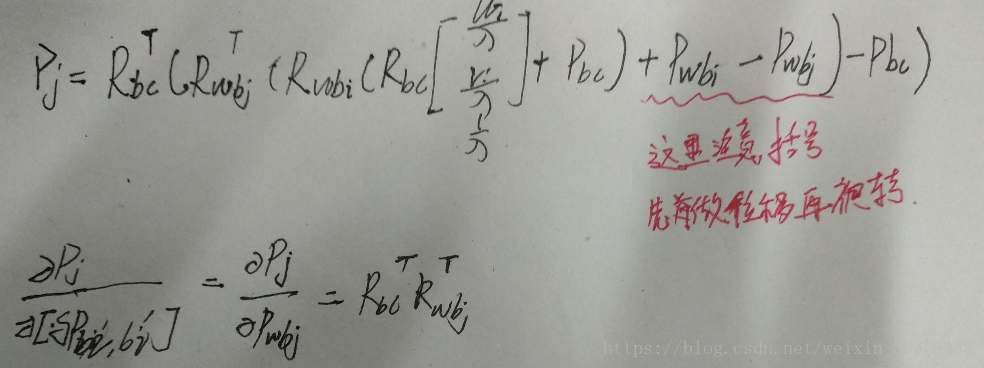
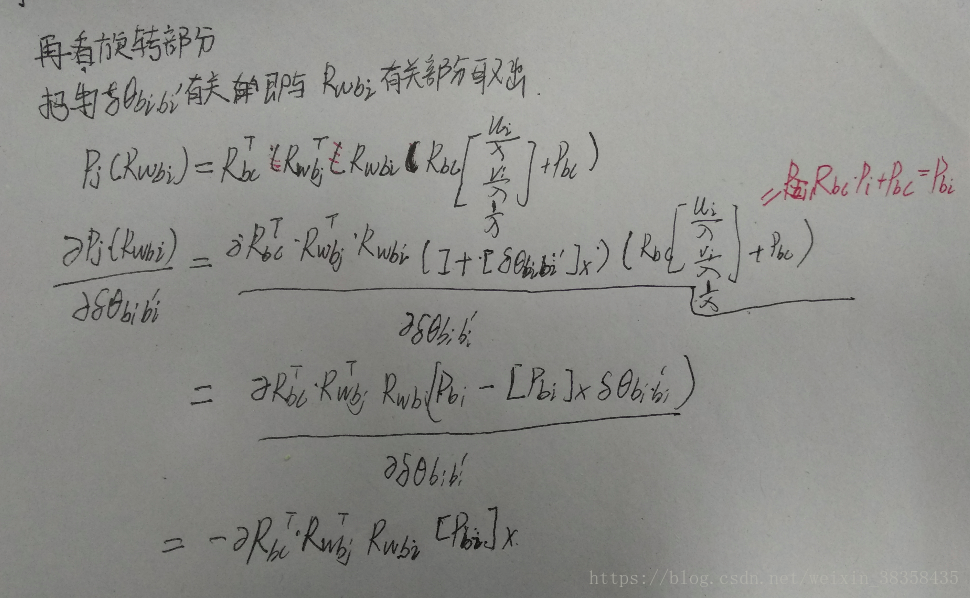
后面J[1],J[2],J[3]直接copy了.
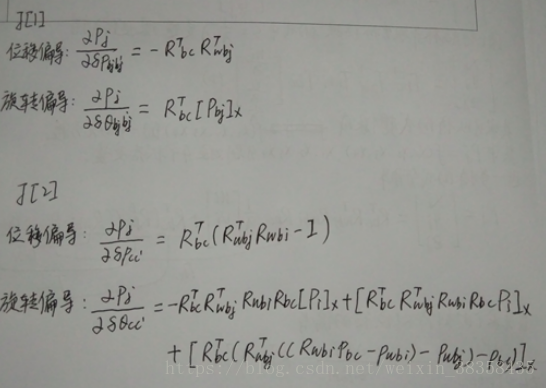
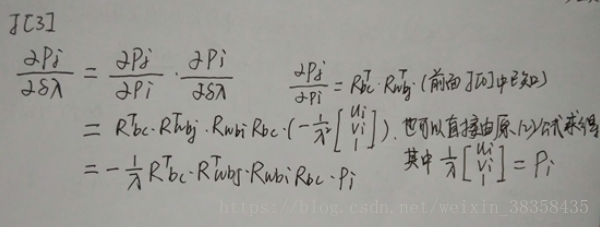
以上就是相机测量误差以及误差方程的雅克比矩阵的求解过程。

















 1441
1441

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









