







 本文作者分享了关于机器人正解逆解的问题解答,建议读者先了解相关计算方法。正解是坐标变换过程,逆解则用于根据位置坐标计算关节角度。参数表对坐标系和角度计算有直接影响,文件中的偏移值和DH参数处理是关键。程序在Ubuntu下运行,Windows用户需修改文件路径。代码未经严格测试,仅供参考。
本文作者分享了关于机器人正解逆解的问题解答,建议读者先了解相关计算方法。正解是坐标变换过程,逆解则用于根据位置坐标计算关节角度。参数表对坐标系和角度计算有直接影响,文件中的偏移值和DH参数处理是关键。程序在Ubuntu下运行,Windows用户需修改文件路径。代码未经严格测试,仅供参考。
距机器人正解逆解的3篇文章已经有一年多时间 不知不觉浏览已有一万
在评论里看到一些问题 在此尝试解答
建议还是先看看相关的书中的计算方法 不知道计算方法而通过程序去理解如何计算 是比较难的
代码里面的注释很少 唉 好吧 本人代码品格较差 (其实是忘了)
机器人的正解根据各关节角度计算位置 其实就是坐标变换
从一个坐标系变换到另一个坐标系 得到最终的位置坐标
这个用三角函数也可以计算 可以不用矩阵 程序不是非常复杂
但是有些角度的计算需要特别处理
选择的坐标系直接影响所计算的位置
坐标系各坐标轴的方向会影响到角度的+/- 和坐标值的+/-
这些都体现在参数表中
参数表的结构就是param_t结构体的后3项 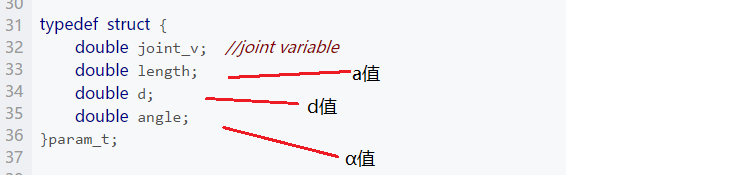
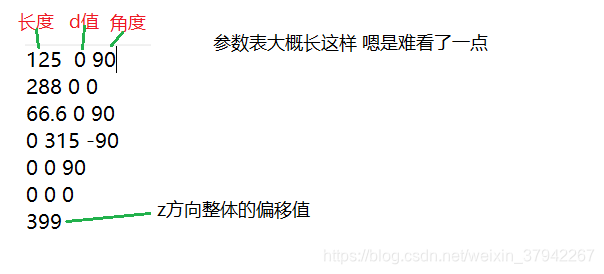
参数表文件的内容只是多了最后一行
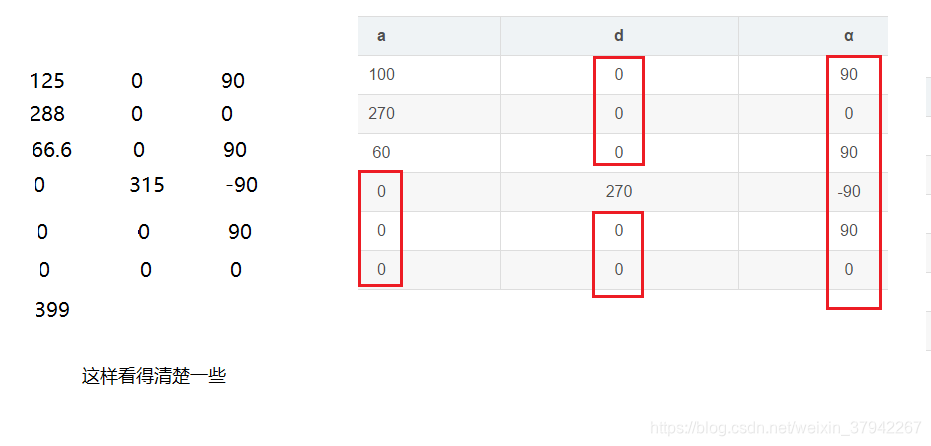
参数表文件中的最后一行 是在Z方向上的整体偏移值
关节角度

以上数据我是随便举例子的 有可能不符合要求
逆解所用的文件 格式是一样的
逆解读入的6个值 X, Y, Z, Y, P, R
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 951
951

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









