






 本文深入浅出地介绍了PID控制器的工作原理。比例控制(P)提供快速响应,但存在稳态误差;积分控制(I)用于消除稳态误差;微分控制(D)则有助于系统稳定,减少震荡。理解PID的快速性、准确性和稳定性对于控制系统设计至关重要。
本文深入浅出地介绍了PID控制器的工作原理。比例控制(P)提供快速响应,但存在稳态误差;积分控制(I)用于消除稳态误差;微分控制(D)则有助于系统稳定,减少震荡。理解PID的快速性、准确性和稳定性对于控制系统设计至关重要。
网络上关于PID的一个浅显易懂的讲解: 链接.
P:比例控制,是最基本的,但其有个缺点就是存在稳态误差,(增加的量和减少的量相等时,比例控制不起作用),
I:积分控制,该积分控制分量和误差的积分是成比例关系,因此可以消除稳态误差,
D:微分控制,减少控制过程中的震荡,防止超调。
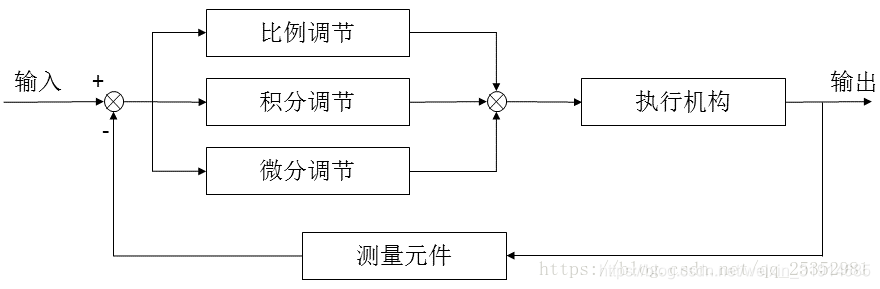
快速(P)、准确(I)、稳定(D)
1稳定性(P和I降低系统稳定性,D提高系统稳定性):在平衡状态下,系统受到某个干扰后,经过一段时间其被控量可以达到某一稳定状态;
2 准确性(P和I提高稳态精度,D无作用):系统处于稳态时,其稳态误差;
3快速性(P和D提高响应速度,I降低响应速度):系统对动态响应的要求。一般由过渡时间的长短来衡量。

















 930
930

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









