



 本文介绍了使用OpenCV进行双摄像头标定的过程,包括内参与外参计算,并分享了排除异常图片提高标定精度的经验。
本文介绍了使用OpenCV进行双摄像头标定的过程,包括内参与外参计算,并分享了排除异常图片提高标定精度的经验。
因为最近公司需要做多种双摄像头,客户有提供摄像头标定算法库,但是计算时间需要10s,我们需要开发自己的算法库做双摄像头的AA算法。将自己做的一些开发验证记录下来。现在使用的是opencv2 。
方案就是先使用calibrateCamera(),计算出内参矩阵,flages = CV_CALIB_FIX_PRINCIPAL_POINT 。然后再讲计算出来的两个内参矩阵带入到stereoCalibrate()中计算外参,flags = CV_CALIB_USE_INIRINSIC_GUESS 。两个函数使用的flags也是通过一些验证采用的。后续会继续修改。
最开始左右摄像头各14张图片,使用findChessboardCorners()找角点,然后使用CalibrateCamera()计算内参,该方法计算出的fx、fy、cx、cy和实际值比较接近。但是使用stereocalibrate()计算后f、c以及外参都相差很大。返回值为33 。下面是计算出来的值:
Left Intrinsic Matrix:
[331.1380866164013, 0, 689.681982877237;
0, 336.6960625970602, 436.5861067369713;
0, 0, 1]
Left DIstortion Coefficient
[-0.06412712503254797, 0.002848198273026188, 0.008061330556533512, 0.0006053658232553228, -4.789268675862791e-005]
Right Intrinsic Matrix:
[908.332764337193, 0, 443.6938216799247;
0, 963.0446952696788, 545.4150938814089;
0, 0, 1]
Right DIstortion Coefficient
[-0.4047120416002747, 0.1576211152407682, -0.1107725264003418, 0.074682359840824, -0.02265909249787683]
Rotation Vector:
[0.9933640620221751, -0.01926925391313738, -0.113386666484359;
0.05294781066278497, 0.9517994136359071, 0.3021165429902197;
0.1020998022957052, -0.3061152920975599, 0.9465035965674951]
Translation Vector:
[396.1207835183296;
-138.5667325803473;
539.0193360335929]
Epipolar error:
57.7067
此时发现findChessboardCorners()后保存的图片中有一些图片找到点的排布是纵向的。
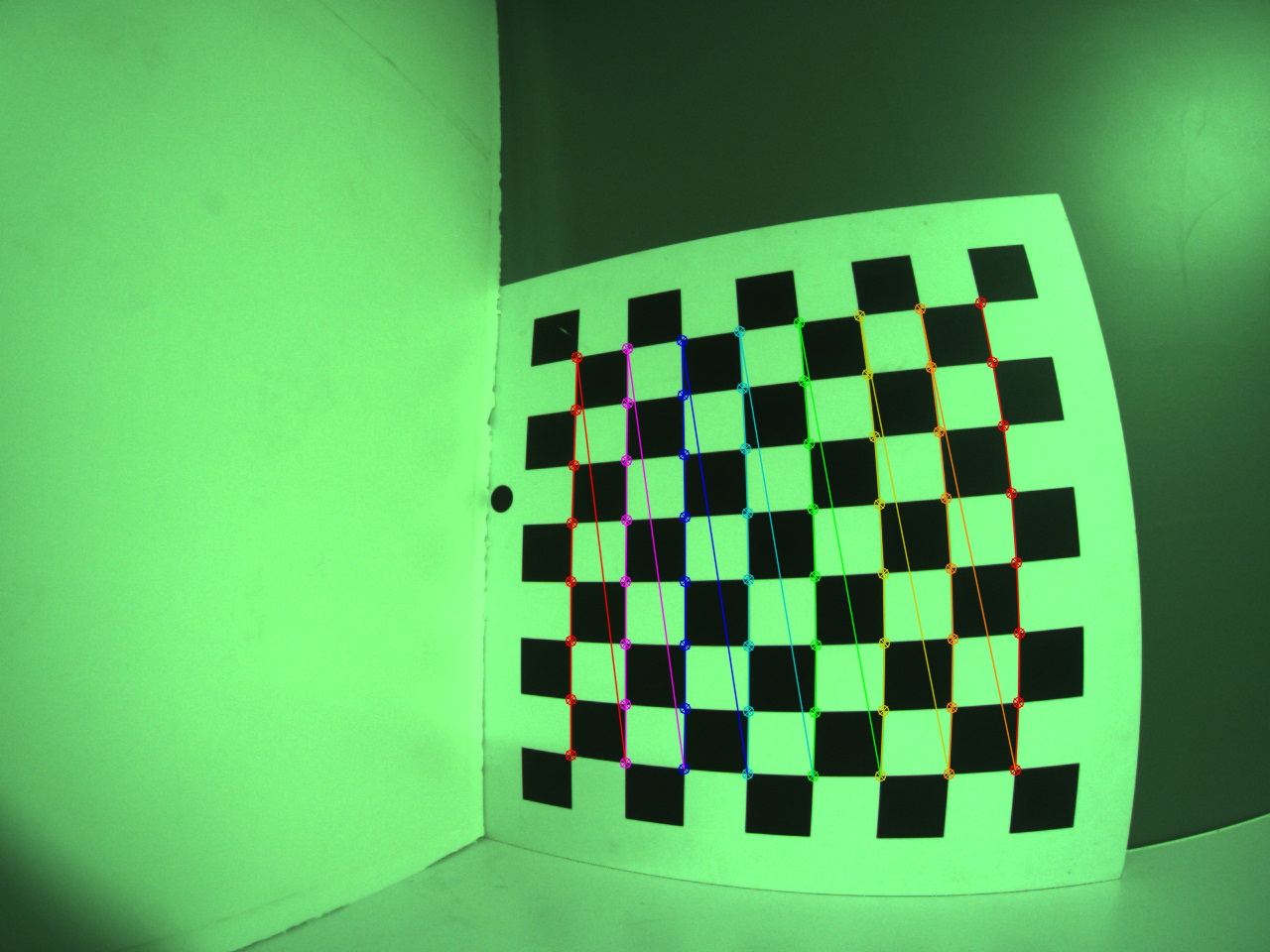
将这些图片删除后,重新标定carmeracalibrate和stereocalibration标定结果和实际结果都比较接近,函数返回值0.86。
Left Intrinsic Matrix:
[617.9101131889279, 0, 640.3831863262259;
0, 616.539048560972, 470.8852055846035;
0, 0, 1]
Left DIstortion Coefficient
[-0.3160725964717645, 0.1183455881401956, -0.0003582946055107289, 0.0001300763327810702, -0.02027464582891017]
Right Intrinsic Matrix:
[616.7082963355913, 0, 643.8073885431724;
0, 614.6086031282096, 475.9553508871588;
0, 0, 1]
Right DIstortion Coefficient
[-0.3283699566659782, 0.1405898643626092, -0.0003070242127762826, 0.000218597731206718, -0.02997089058842775]
Rotation Vector:
[0.9999380837728382, 0.00917492482673124, -0.00629677497836464;
-0.009145577519941637, 0.9999472557785126, 0.00467376431249078;
0.006339324296095481, -0.004615887286947652, 0.9999692528033165]
Translation Vector:
[162.4639276656994;
-0.8147771119972097;
-2.346281661806077]
Epipolar error:
0.686047
两个摄像头的间距理论值为161.00 。 标定的结果和客户的比也比较接近。但是还需优化。
使用该参数矫正图片很差:
知识总结:
1、需要保持左右相机处理过程中一系列的图片,选择使用 vector《vector> image_seq ;这种类似于二维数组的方法。在定义完成之后需要对其分配空间 。 image_seq.resize(2,vector()); 这样就可以分别保持两组系列图片。如果是在函数中保持一系列图片,函数形参应使用引用。因为’<’这份符合打在第一个vector后面,后面的字就会看不见,所以用”《” .
待更新。。。。。

















 9921
9921

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









