



 博客介绍了使用rqt_graph查看动态消息图,将鼠标放在/usb_cam/image_raw上,相应的node和topic会高亮,还提及了rosrun image_view image_view image:=xx命令,并给出了转载来源。
博客介绍了使用rqt_graph查看动态消息图,将鼠标放在/usb_cam/image_raw上,相应的node和topic会高亮,还提及了rosrun image_view image_view image:=xx命令,并给出了转载来源。
source devel/setup.*sh
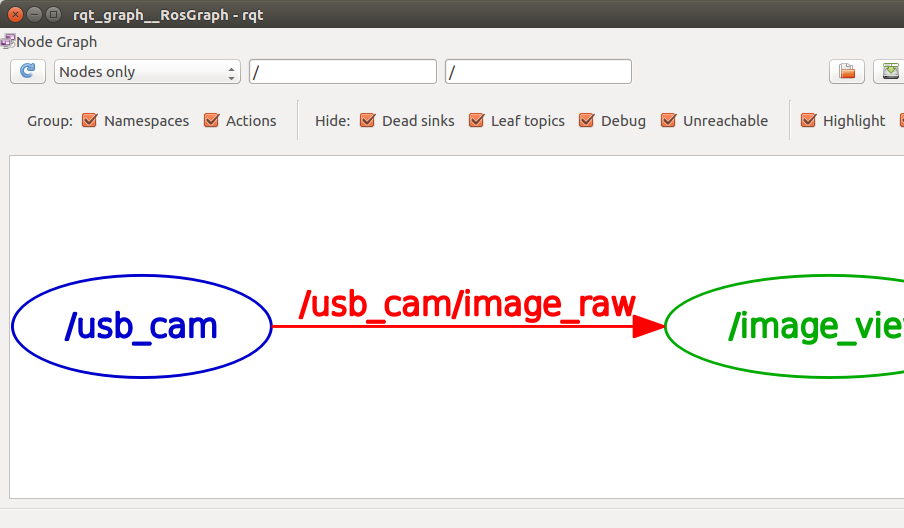
roslaunch usb_cam usb_cam-test.launchrqt_graph查看动态消息图
当我们把鼠标放在/usb_cam/image_raw上面,相应的node(蓝色和绿色)和topic(红色)高亮
查看话题类型
rostopic type /usb_cam/image_raw
打印结果为sensor_msgs/Imagerosrun image_view image_view image:=xx
source devel/setup.*sh
roslaunch usb_cam usb_cam-test.launchrqt_graph查看动态消息图
当我们把鼠标放在/usb_cam/image_raw上面,相应的node(蓝色和绿色)和topic(红色)高亮
查看话题类型
rostopic type /usb_cam/image_raw
打印结果为sensor_msgs/Imagerosrun image_view image_view image:=xx
转载于:https://www.cnblogs.com/Todd-Qi/p/10831455.html
 2115
763
802
2115
763
802

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























