




简介:本文深入探讨了ROS(Robot Operating System)框架中的动作服务器和动作客户端,这是实现高级机器人行为的关键组成部分。动作系统通过目标、结果和反馈机制提供结构化任务执行和监控。文章提供C++语言的具体实现代码,包括动作服务器的创建和动作客户端的使用,帮助开发者理解和应用这些概念来构建复杂的机器人控制系统。
1. ROS动作系统概念介绍
1.1 ROS动作系统的作用
在机器人操作系统(ROS)中,动作系统提供了一种机制,使得复杂的、长时间运行的任务得以在模块之间异步执行。它允许节点之间进行长期的、非同步交互,这是基于目标/反馈/结果的通信模式。
1.2 动作系统的组成要素
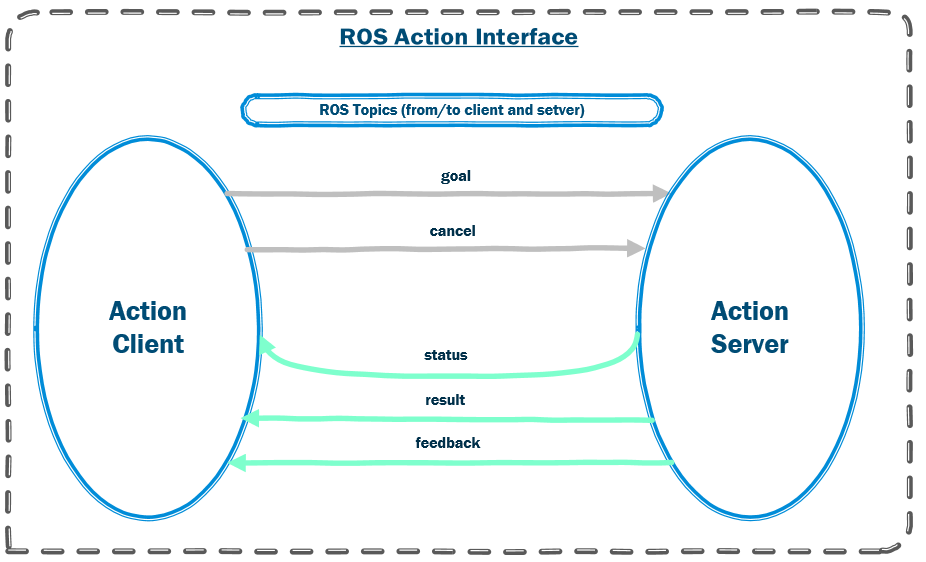
动作系统主要由动作服务器(Action Server)和动作客户端(Action Client)组成。动作服务器负责处理动作请求,执行具体任务,并且向客户端报告其状态;动作客户端则用于发送动作请求给服务器,并接收执行过程中的反馈和最终结果。
1.3 动作系统的工作流程
动作系统的工作流程包括动作的发送、动作的执行、状态监控、反馈收集和结果返回。理解这一流程有助于在ROS环境中高效地开发和管理复杂的机器人行为。
接下来,我们将深入了解动作服务器的创建与实现,这是动作系统中关键的组成部分。
2. 动作服务器的创建与实现
2.1 动作服务器基础
2.1.1 动作服务器的作用与结构
动作服务器(Action Server)在ROS中扮演着处理复杂任务的角色,例如导航、机械臂操作等,这些任务往往涉及长时间的执行和中间结果的反馈。动作服务器提供了一种在客户端和执行器之间异步通信的方式,使得客户端能够发送动作请求并接收动作状态更新和最终结果。
动作服务器内部通常包括以下几个关键组件:
- 目标监听器 (Goal Listener):负责接收来自客户端的动作目标。
- 执行器 (Executor):负责实际执行动作,并提供状态更新。
- 反馈监听器 (Feedback Listener):负责接收执行器的状态反馈信息。
- 结果监听器 (Result Listener):负责接收执行完成后的动作结果。
这些组件协同工作,确保动作的顺利执行和信息的及时反馈。
2.1.2 动作服务器的启动与配置
为了启动动作服务器,需要定义动作的规范,创建动作消息,并配置动作服务器的ROS节点。以下是启动动作服务器的基本步骤:
- 定义动作规范 :通过
.action文件定义动作规范,包括目标(Goal)、反馈(Feedback)和结果(Result)。 - 生成动作消息代码 :使用
catkin_make或其他构建系统处理动作规范文件,生成动作消息相关的C++类。 - 编写动作服务器代码 :创建一个继承自
actionlib::SimpleActionServer的类,实现具体的动作处理逻辑。 - 配置ROS节点和参数 :设置ROS节点和所需的参数,如动作服务器的名称。
- 启动动作服务器 :创建动作服务器对象,并在适当时候调用其启动方法。
示例代码段展示了动作服务器的基本结构:
#include <ros/ros.h>
#include <actionlib/server/simple_action_server.h>
#include <my_action_package/FibonacciAction.h> // 假设动作规范文件为Fibonacci.action
class FibonacciAction {
protected:
ros::NodeHandle nh_;
actionlib::SimpleActionServer<my_action_package::FibonacciAction> as_; // 动作服务器对象
my_action_package::FibonacciFeedback feedback_;
my_action_package::FibonacciResult result_;
// 动作执行的回调函数
void executeCB(const my_action_package::FibonacciGoalConstPtr& goal) {
bool success = true;
ros::Rate rate(1);
// 执行动作的逻辑
...
if (success) {
result_.sequence = // 设置结果值
as_.setSucceeded(result_); // 返回成功状态
} else {
as_.setAborted(result_); // 返回失败状态
}
}
public:
FibonacciAction(std::string name) : as_(nh_, name, false) {
as_.registerGoalCallback(boost::bind(&FibonacciAction::executeCB, this, _1)); // 注册回调函数
as_.start(); // 启动作服务器
}
};
int main(int argc, char** argv) {
ros::init(argc, argv, "fibonacci_action_server");
FibonacciAction as("fibonacci"); // 初始化动作服务器
ros::spin();
return 0;
}
在这个过程中,需要正确配置ROS参数服务器,可能涉及到的动作服务器的参数包括:
- 服务器名称
- 目标监听器的回调函数
- 执行器和反馈监听器的相关设置
2.2 动作服务器的实现机制
2.2.1 动作服务器的消息处理流程
动作服务器的消息处理流程包含了与动作客户端的交互以及动作执行过程中的状态管理。了解这一流程对于开发者来说至关重要,因为它涉及到动作如何被规划、执行和监控。
- 接收目标 :客户端通过发送动作目标(Goal)消息到服务器,请求执行动作。
- 目标处理 :服务器接收到目标后,根据内部逻辑判断是否接受该目标,并给客户端发送接受或拒绝的响应。
- 动作执行 :一旦目标被接受,服务器将开始执行动作,同时可以周期性地发送执行状态(Status)和反馈(Feedback)消息给客户端。
- 结果通知 :动作执行完毕后,服务器将发送最终结果(Result)消息给客户端,并更新自身状态。
下图展示了动作服务器的处理流程:
graph LR
A[动作客户端] -->|发送目标| B[动作服务器]
B -->|接受/拒绝| A
B -->|执行动作| C[执行器]
C -->|周期反馈| B
C -->|完成| B
B -->|发送结果| A
2.2.2 动作执行状态的监控与反馈
动作执行状态的监控与反馈是动作服务器实现中非常重要的部分,它涉及到状态的持续追踪以及在执行过程中实时地向客户端报告进度和状态信息。
- 状态跟踪 :动作服务器会根据内部逻辑持续地监控动作的执行状态,以确定动作是否成功、失败或被取消。
- 反馈信息 :动作服务器能够向客户端发送状态更新和反馈信息,这对于长时间运行的动作来说尤为关键,因为它允许客户端跟踪进度并做出相应的决策。
- 状态响应 :客户端收到状态和反馈后,可以决定是否继续等待、取消动作或执行其他操作。
状态监控和反馈机制确保了动作服务器具有高度的灵活性和容错能力。一个动作服务器可以同时处理多个客户端发送的多个动作请求,确保每个动作请求都能得到适当的处理和反馈。
接下来,第三章将深入讨论动作客户端的创建与实现,这对于完整地理解动作服务器与客户端之间的交互至关重要。
3. 动作客户端的创建与实现
在上一章我们详细探讨了动作服务器的创建与实现,本章将着重介绍如何创建动作客户端,并实现与动作服务器的交互。动作客户端是与动作服务器进行通信的另一个关键组件,它负责向动作服务器发送目标(goals),接收反馈(feedbacks)以及最终的状态结果(results)。
3.1 动作客户端概述
3.1.1 动作客户端的定位与功能
动作客户端位于ROS(Robot Operating System)中的客户端节点,其核心职责是向动作服务器提出任务请求,并通过定义的通信协议与服务器进行交互。客户端可以根据用户输入或内部逻辑生成目标,并将其发送至服务器;同时,客户端也会接收来自服务器的反馈信息和最终状态,以实现对动作执行过程的监控和管理。
在功能上,动作客户端不仅需要具备发送目标、接收反馈和结果的基本能力,还应该具备一定的异常处理和状态监控机制,以确保动作的顺利完成。
3.1.2 客户端与服务器的交互模式
客户端与服务器之间的交互遵循ROS动作通信协议,这是一套预先定义好的消息和回调机制。客户端发送目标给服务器后,服务器会处理目标,并周期性地向客户端提供反馈。最终,服务器会向客户端发送一个结果消息,表明动作已完成、被取消或失败。
客户端在接收到服务器的反馈信息后,可以执行额外的逻辑处理,如更新用户界面、调整机器人状态或对环境进行感知等。
3.2 动作客户端的编程实践
3.2.1 编写客户端代码
下面,我们将通过一个简单的示例来展示动作客户端的实现方法。假设我们有一个名为 AddTwoIntsAction 的动作类型,其服务器已在第二章中创建并运行。动作客户端需要完成以下任务:
- 创建一个节点。
- 使用
actionlib库连接到动作服务器。 - 向服务器发送目标。
- 接收并处理来自服务器的反馈和结果消息。
- 处理目标完成或失败后的逻辑。
以下是该过程的伪代码:
#!/usr/bin/env python
import rospy
import actionlib
from my_robot_msgs.msg import AddTwoIntsAction, AddTwoIntsGoal
def done_callback(state, result):
rospy.loginfo("Finished in state: " + state)
rospy.loginfo("Answer: " + str(result.sum))
def active_callback():
rospy.loginfo("Goal just went active!")
def feedback_callback(feedback):
rospy.loginfo("Got feedback: " + str(feedback))
def client():
# 1. 创建客户端节点
rospy.init_node('add_two_ints_client')
# 2. 创建动作客户端连接到服务器
client = actionlib.SimpleActionClient('add_two_ints', AddTwoIntsAction)
client.wait_for_server()
# 3. 创建目标并发送
goal = AddTwoIntsGoal()
goal.a = 1
goal.b = 2
client.send_goal(goal, done_callback, active_callback, feedback_callback)
# 4. 阻塞等待直到目标完成
client.wait_for_result()
if __name__ == '__main__':
client()
3.2.2 处理动作目标、反馈和结果
在上述代码中,我们定义了多个回调函数来处理不同的阶段:
-
done_callback:当目标完成后被调用,无论结果是成功、失败还是被取消。 -
active_callback:在目标变得活跃后,即服务器开始处理目标时被调用。 -
feedback_callback:周期性地接收来自服务器的反馈信息。
客户端的实现细节由具体的业务需求决定。例如,如果有状态需要监控,可以在此处更新用户界面或执行其他相关逻辑。
在实际的应用场景中,动作客户端可能需要处理更复杂的逻辑,包括但不限于:
- 发送多个目标。
- 暂停、取消已发送的目标。
- 根据从动作服务器接收到的反馈信息调整目标参数。
动作客户端的设计和实现是ROS动作系统中极其关键的一环,确保了机器人能够灵活、有效地执行复杂的任务序列。通过本章的介绍,我们希望能帮助读者建立一个清晰的动作客户端实现框架,以便在未来的机器人开发中能够更加高效地应用这一机制。
4. 使用 actionlib 库创建动作服务器和客户端
4.1 actionlib 库介绍
actionlib 是ROS中用于实现动作服务器和动作客户端之间通信的一个库,它允许开发者创建可执行长时间任务的节点,并能够处理取消操作、同步和异步反馈。 actionlib 库不仅提供了一套稳定的API,还封装了状态管理、消息传输以及运行时行为的许多复杂细节。
4.1.1 actionlib 库的核心功能
actionlib 库的核心功能之一是它提供了一种构建和管理动作的标准方法。动作服务器发布goal消息来接收客户端请求,并在执行过程中提供状态反馈和结果。客户端则发送goals给服务器,并能够查询目标状态,接收执行的反馈以及最终的结果。
actionlib 还支持并发执行多个goals,为客户端和服务器端提供了丰富的回调机制,允许在目标的执行过程中进行交互。此外,它还提供了故障转移和目标取消的机制,这在处理远程任务或不确定的执行环境中显得尤为重要。
4.1.2 集成 actionlib 库的优势
集成 actionlib 库的主要优势是它可以极大地简化ROS中动作服务器和客户端的开发过程。使用 actionlib ,开发者可以避免编写大量样板代码来处理消息传输、状态更新、以及错误处理等低级任务。它还提供了一种统一的接口,使得实现动作的节点能够更容易地与其他节点集成。
通过使用 actionlib ,开发者可以专注于实现动作的业务逻辑,而将底层的通信细节留给库来处理。此外, actionlib 库通过其消息类型和回调机制,使得动态的取消请求、状态更新和结果反馈成为可能,从而增强了应用程序的响应性和可靠性。
4.2 actionlib 的实践应用
4.2.1 构建动作服务器框架
要构建一个动作服务器框架,首先需要定义动作的类型。这涉及到创建一个包含goal、result和feedback消息的 .action 文件。然后,在服务器端,开发者需要实现一个继承自 SimpleActionServer 的类,该类将负责接收goal请求,并在执行过程中提供状态更新。
from actionlib import SimpleActionServer
from my_robot_package import MyAction, MyGoal, MyResult, MyFeedback
class MyActionServer(object):
def __init__(self, name):
self._action_server = SimpleActionServer(
name,
MyAction,
execute_cb=self.execute_cb,
auto_start=False
)
self._action_server.start()
def execute_cb(self, goal):
# 实现执行动作的逻辑
success = True
rate = rospy.Rate(10)
feedback = MyFeedback()
for i in range(100):
if self._action_server.is_preemptRequested():
rospy.loginfo('Goal preempted')
self._action_server.set_preempted()
success = False
break
feedback.step = i
self._action_server.publish_feedback(feedback)
rate.sleep()
result = MyResult()
if success:
self._action_server.set_succeeded(result)
在此代码段中,我们创建了一个 SimpleActionServer 实例,并定义了当目标到达时将要执行的回调函数 execute_cb 。这个函数会执行一个循环,定期更新反馈消息,并检查是否收到取消请求。
4.2.2 实现动作客户端与服务器的通信
动作客户端负责向服务器发送动作目标,并接收来自服务器的反馈和结果。客户端的实现依赖于 actionlib 库中的 ActionClient 类。以下展示了如何创建一个动作客户端,并发送goal请求给服务器。
from actionlib import ActionClient
from my_robot_package import MyAction, MyGoal
def goal_callback(status, result):
if status:
rospy.loginfo("Action finished: %s" % result)
def send_goal():
action_client = ActionClient('/my_action', MyAction)
action_client.wait_for_server()
goal_msg = MyGoal()
goal_msg.data = 42 # 假设我们的动作需要一个整数目标值
action_client.send_goal(goal_msg, done_cb=goal_callback)
rospy.sleep(1)
action_client.cancel_goal()
rospy.sleep(1)
action_client.wait_for_result()
if __name__ == '__main__':
rospy.init_node('my_action_client')
send_goal()
在这个例子中,我们创建了 ActionClient 实例并发送了一个包含目标值的目标消息。 done_cb 参数是一个回调函数,用于在动作完成时被调用。我们还展示了如何取消目标和等待结果。
通过这些实践应用,我们可以看到 actionlib 如何简化了动作服务器和客户端的创建和通信,允许开发者更专注于动作逻辑的实现。在下一节中,我们将深入探讨动作消息类型的定义和应用,以及如何在ROS中有效地使用这些消息类型来实现复杂的机器人行为控制。
5. 动作消息类型的定义和应用
在ROS中,动作消息类型是用来在动作客户端和动作服务器之间进行通信的一种特殊的通信机制。动作消息允许异步和连续的通信,这对于处理如导航和手臂运动控制这类持续性任务非常关键。
5.1 动作消息类型基础
5.1.1 动作消息的结构与组成
动作消息由三部分组成:目标(Goal)、结果(Result)和反馈(Feedback)。目标部分定义了动作执行的最终期望;结果部分包含了动作执行完成后的最终状态;而反馈部分则提供了动作执行过程中的实时状态信息。
在ROS中,定义动作消息类型需要创建三个文件:
-
<action_name>.action:定义动作消息的结构。 -
<action_name>_Goal.msg:定义动作目标的消息结构。 -
<action_name>_Result.msg:定义动作结果的消息结构。 -
<action_name>_Feedback.msg:定义动作反馈的消息结构。
5.1.2 动作消息在ROS中的定义方式
在ROS中,动作消息是通过使用action文件来定义的。动作消息定义文件通常放在一个名为 action 的包目录下。例如,定义一个名为 Fibonacci.action 的动作,其内容可能如下:
# Goal
int32 order
# Result
int32[] sequence
# Feedback
int32[] partial_sequence
以上是一个计算斐波那契数列序列的动作定义。这里定义了目标为计算的序列的长度,结果是整数序列,反馈是当前计算的序列部分。
5.2 动作消息在实际中的应用
5.2.1 动作消息的定制与扩展
在实际应用中,标准的动作消息可能不足以满足特定的应用需求。这时,开发者可以定制或扩展动作消息。例如,可以在 Fibonacci.action 基础上增加额外的状态信息,以更好地监控动作执行过程。
5.2.2 动作消息在行为控制中的使用实例
动作消息在行为控制中的应用非常广泛,从简单的机械臂运动到复杂的导航任务都可以使用动作消息来实现。
以一个简单的机械臂移动为例,动作消息可以用来定义目标位置,动作执行过程中的实时位置反馈,以及最终的目标位置结果。这样的设计不仅使得动作执行过程可预测,也允许外部干预,从而在必要时调整动作执行的细节。
接下来,将通过具体的代码示例,展示如何在ROS中定义动作消息,以及如何在节点中使用这些动作消息来实现复杂的机器人行为控制。我们将深入分析在实际机器人应用中如何通过动作消息来优化行为控制流程,以及在遇到常见问题时如何进行排查和解决。
(注意:代码块、表格、列表、mermaid格式流程图的使用和具体示例将在后续的具体章节内容中提供。)
简介:本文深入探讨了ROS(Robot Operating System)框架中的动作服务器和动作客户端,这是实现高级机器人行为的关键组成部分。动作系统通过目标、结果和反馈机制提供结构化任务执行和监控。文章提供C++语言的具体实现代码,包括动作服务器的创建和动作客户端的使用,帮助开发者理解和应用这些概念来构建复杂的机器人控制系统。

















 7862
7862

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









