







PX4实战(七):PX4决策模块(commander)代码详解1(总体流程+解锁过程)
前言
PX4软件中的commander模块类似一个决策模块,比如决策飞机解锁的过程、决策模式切换的过程、决策触发失效保护(失联、低电量等)的过程,还进行起飞前的自检,还对传感器进行校准等。commander模块是PX4内逻辑相对比较多的模块、也是最顶层的一个模块。
共分三章介绍:
- 第一篇:commander总体的流程+解锁过程。
- 第二篇:模式切换的过程+失效保护过程,因为模式切换和失效保护是综合决策的。
- 第三篇:介绍起飞前自检的策略。
另外传感器校准不介绍了,内容很多也比较独立,实际开发中用的不多,只需要按照流程会校准就行。
1 commander模块总体流程
2.1 模块输入输出数据流
2.1.1 重要输出数据
2.1.1.1 vehicle_control_mode_s
这是一个很至关重要的输出,是整个PX4软件运行哪些控制器的决策者。
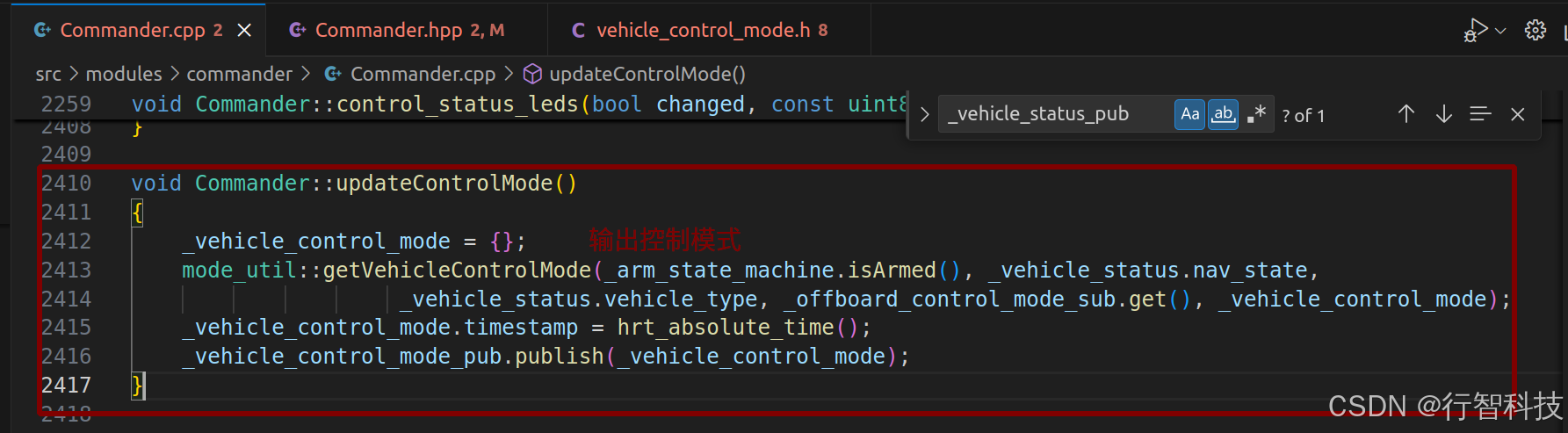
控制模式数据内容如下:

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 329
329

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









