




 本文详细描述了工程框架中场景配置、场景注册与转换的过程,以及Scenario和Stage类的执行逻辑,特别关注了Task的执行函数,展示了如何通过Stage的Process方法调用Task来处理场景中的任务.
本文详细描述了工程框架中场景配置、场景注册与转换的过程,以及Scenario和Stage类的执行逻辑,特别关注了Task的执行函数,展示了如何通过Stage的Process方法调用Task来处理场景中的任务.
工程框架
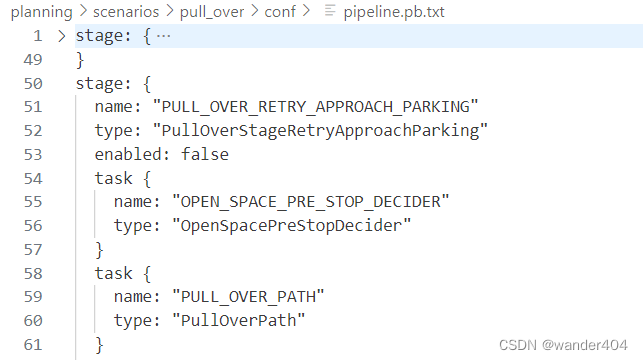
场景配置
场景通过场景配置文件进行配置
场景注册和场景转换
scenariomanager
planning\planners\public_road\scenario_manager.cc
代码逻辑
Scenario
执行函数流程如下,最终是调用场景的Process()函数,实现对场景的处理
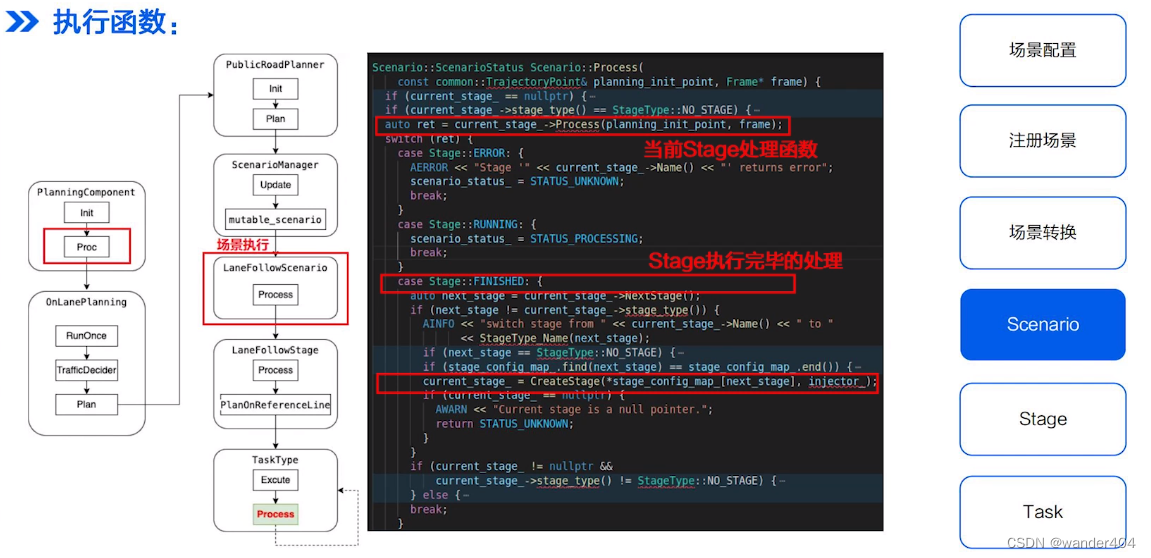
planning\planning_interface_base\scenario_base\scenario.cc
ScenarioResult Scenario::Process(
const common::TrajectoryPoint& planning_init_point, Frame* frame) {
if (current_stage_ == nullptr) {
current_stage_ = CreateStage(
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4085
4085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









