





 本文针对四路鱼眼摄像头在不同光照条件下拍摄的图像,提出了一种基于RGB三通道系数校正的方法来实现拼接图像的光照均一化。通过对图像重叠区域的颜色差异进行最小化处理,有效地改善了拼接图像的颜色一致性。
本文针对四路鱼眼摄像头在不同光照条件下拍摄的图像,提出了一种基于RGB三通道系数校正的方法来实现拼接图像的光照均一化。通过对图像重叠区域的颜色差异进行最小化处理,有效地改善了拼接图像的颜色一致性。
由于四路鱼眼摄像头在CMOS传感器的噪音,快门速度,曝光时间抖动等之间存在一定的差异,特别是在感光度上,另外每个摄像头装置在车身的前后左右四个方向,对于汽车来说每个方向的场景光照亮度都存在不同,有的地方光度非常亮,有的却十分阴暗,这样极容易造成驾驶员视觉上观察的困难,对于车身周边情况观察不清晰。经拼接缝融合出来后,虽然拼接缝消除,但是在拼接缝两边的区域图像都存在一定的光照差异,使得映射后两图的存在颜色差异,因此我们需要对拼接融合处理后的图片进行光照均一化处理。
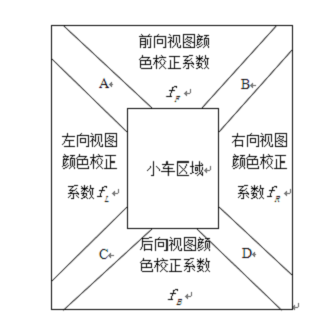
光照不均匀的补偿方法有多种,如图像直方图均衡化处理,伽马校正等。对于由不同摄像头拍摄图像拼接起来的图像可以采用基于RGB三通道系数校正的方法[11],该算法原理是通过以四个方向的重叠区域的颜色差异之和最小为目标函数,通过求取相关颜色校正系数,以达到光照均一化目的。设A、B、C、D为相邻两图的重叠区域。 分别表示前后左右四个方向视图RGB灰度值乘以的校正系数。如图所示:
分别表示前后左右四个方向视图RGB灰度值乘以的校正系数。如图所示:
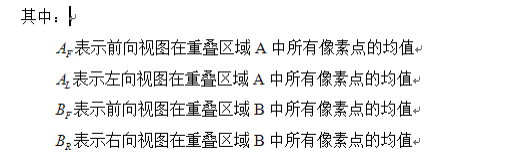
可设目标函数为:

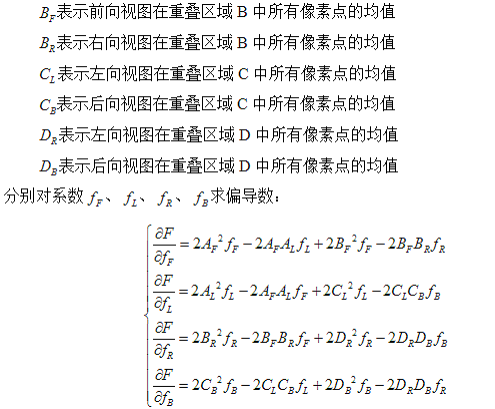
将上式化为矩阵形式表示:
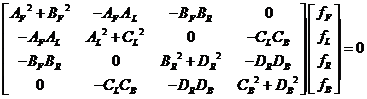
校正系数,只需要分别对RGB图像的三通道按上式求解出各自的系数,再利用其系数乘以其RGB通道相应的灰度值就可以完成拼接图颜色校正,即完成整图的光照均一化处理。
















 1770
1770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









