







🏡博客主页: virobotics(仪酷智能):LabVIEW深度学习、人工智能博主
🎄所属专栏:『AI教育解决方案』
📑推荐文章:『LabVIEW人工智能深度学习指南』
🍻本文由virobotics(仪酷智能)原创🥳欢迎大家关注✌点赞👍收藏⭐留言📝订阅专栏
文章目录
🧩前言
大家好,这里是仪酷智能 VIRobotics。
我们推出了一套完整的垃圾分类教学解决方案。该方案基于 LabVIEW 图形化编程平台,深度融合机械臂与工业视觉系统,构建了从环境搭建到 YOLOv8 模型部署的全流程教学实践体系。方案内附详细的硬件选型指南,并已在多所高校成功落地应用。
🎯 一、实训平台核心目标
-
技术融合
AI视觉 + 机械臂控制 + 深度学习(YOLOv8),实现垃圾自动识别与分拣闭环。 -
能力培养
- 主流AI框架应用能力
- 视觉定位/检测/识别实战技能
- 机械臂运动控制与系统集成
⚙️ 二、硬件配置清单(关键设备详解)
2.1 核心硬件组件清单
| 组件类别 | 规格 | 技术参数要点 |
|---|---|---|
| AI 核心控制器 | AI 开发板 | Intel 赛扬 N5105 处理器 / 4GB LPDDR4x 内存 / 64GB eMMC,支持 OpenVINO AI 加速 |
| 机械臂 | 桌面级机械臂 | 4 轴设计 / 0.2mm 重复定位精度 / USB/WiFi/Bluetooth 通信,支持吸盘/手爪等末端执行器 |
| 视觉系统 | 工业视觉相机 | 130 万像素 CMOS 全局快门 / 201fps@1280×1024 / USB3.0 接口,搭配合金万向支架 |
| 垃圾分类套件 | 四类实物模型 + 卡片 | 包含干/湿/可回收/有害垃圾 100+样本,支持自定义扩展 |
| 上位机软件 | LabVIEW 控制套件 | 含 350+ 机械臂控制函数,支持图形化编程与 OpenVINO 模型推理 |
2.2 关键硬件技术参数
2.2.1 AI 开发板
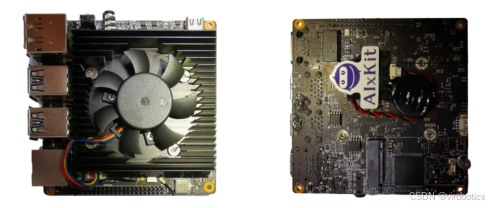
- 处理器架构:Intel Jasper Lake N5105(2.0-2.9GHz)
- AI 加速能力:通过 OpenVINO 实现 CPU/iGPU 协同推理,支持 INT8 量化优化
- 扩展接口:4×USB3.0/HDMI2.0/DP1.4 / 千兆网口 / M.2 NVMe,支持 Ubuntu20.04/Windows11 双系统
2.2.2 桌面机械臂
- 运动性能:320mm 最大伸展距离,0.2mm 定位精度,支持 6 种末端执行器快速切换
- 通信协议:USB-C 接口支持高速数据传输,WiFi/Bluetooth 实现无线控制
- 电气参数:12V DC 供电,3.4kg 净重,支持 4 路 12V 电源输出与 2 路可配置 I/O 接口
2.2.3 视觉采集系统
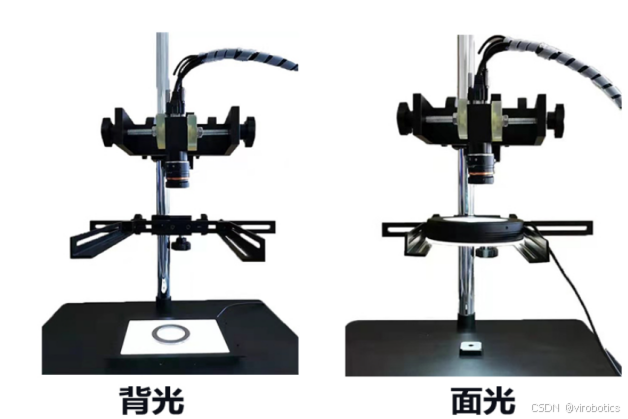
- 相机参数:1/2" 靶面 / 4.8μm 像元尺寸,53dB 动态范围,支持 9μs-10s 宽范围曝光调节
- 支架结构:21.5cm×15cm 合金底座,60cm 可调节立杆,支持 M3/M6 螺丝孔位安装
2.3 设备布局工程图
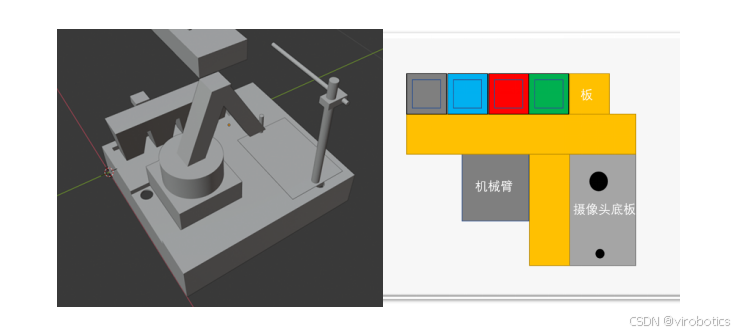
- 工作台尺寸:475mm×430mm×100mm 标准工程桌
- 布局要点:
- 机械臂居中安装,确保 360° 无遮挡工作空间
- 摄像头垂直向下固定于支架顶端,距离工作台面 300mm
- 四类垃圾桶按方位布置于机械臂工作区域边缘,间距≥150mm
💻 三、软件环境搭建
3.1 开发工具链架构
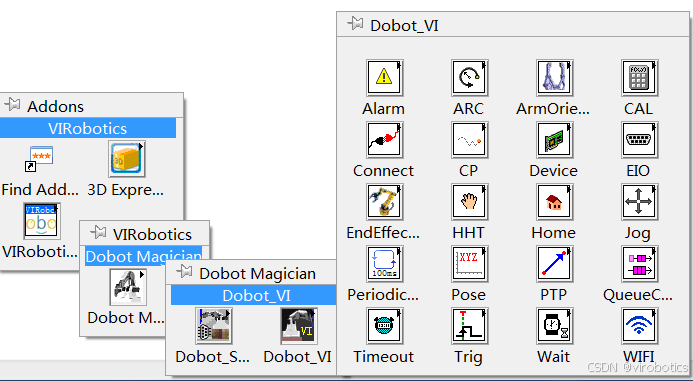
3.1.1 LabVIEW 开发体系
- Dobot SDK for LabVIEW:
- 提供 “Dobot_VI” 与 “Dobot_Serial” 双版本接口
- “半鱼骨” 编程框架:连接配置(鱼头)→主体逻辑(鱼身)→资源释放(鱼尾)
- 350+ 函数覆盖:
- 运动控制(PTP/JOG/ARC)
- IO 配置
- 末端执行器控制
3.1.2 AI 与视觉工具包
-
LabVIEW 深度学习视觉工具包:
- 图形化编程界面
- 支持 TensorFlow/PyTorch/Paddle 模型导入
- 内置 100+ 图像处理算子(滤波/形态学/特征提取)
- 支持应用场景:
- 物体检测/分类
- 图像分割/测量
-
OpenVINO 推理工具包:
- Intel 平台优化的 AI 推理引擎
- 支持模型量化与加速(YOLOv8/LeNet等)
- 多硬件后端调度:CPU/iGPU/TPU
3.2 垃圾分类系统软件流程
- 初始化阶段
机械臂归零校准(Home 函数)
工业相机参数配置(曝光 / 增益 / 白平衡)
AI 模型加载(YOLOv8 权重文件导入) - 识别阶段
图像采集(相机驱动接口)
目标检测(YOLOv8 推理,输出垃圾类别与坐标)
坐标转换(视觉坐标系→机械臂坐标系映射) - 执行阶段
路径规划(避障算法生成抓取轨迹)
机械臂动作控制(PTP 运动模式)
分类投放(根据标签选择对应垃圾桶) - 闭环阶段
状态反馈验证(IO 信号确认投放完成)
任务日志记录(识别准确率 / 分拣耗时统计)
📚 四、课程体系
课程大纲
| 序号 | 课程名称 | 序号 | 课程名称 |
|---|---|---|---|
| 1 | 人工智能视觉技术概论 | 8 | A图像处理基础 |
| 2 | 软件和工具包的安装 | 9 | 深度学习入门 |
| 3 | 机械臂入门 | 10 | A图像分类算法概述 |
| 4 | LabVIEW编程入门 | 11 | LabVIEW调用torch的分类模型 |
| 5 | 单一功能编程 | 12 | 常见目标检测神经网络介绍 |
| 6 | 综合功能编程 | 13 | YOLOv8在LabVIEW中的部署 |
| 7 | LabVIEW读取与采集图像 | 14 | 使用YOLOv8训练自己的数据集 |
| 15 | 基于YOLOv8模型的机械臂垃圾分拣实训 |
🏫 五、高校落地案例


✅ 方案优势:模块化设计支持二次开发,可扩展至工业分拣/仓储物流等场景
💎 总结
本方案提供开箱即用的AI+机器人教学平台,通过图形化编程降低学习门槛,重点培养:
- 机器视觉与机械臂的协同控制能力
- 工业级YOLOv8模型部署经验
- 跨场景技术迁移创新能力
以上就是今天要给大家分享的内容,希望对大家有用。如有笔误,还请各位及时指正,欢迎大家关注博主。我是virobotics(仪酷智能),我们下篇文章见~
如您想要探讨更多关于LabVIEW与人工智能技术,欢迎加入我们的技术交流群:974600160。进群请备注:优快云
更多内容可查看:
- 仪酷智能官网:https://www.virobotics.net/
- 微信公众号:仪酷智能科技
- B站:仪酷智能
- 邮箱:info@virobotics.net
如果文章对你有帮助,欢迎✌关注、👍点赞、✌收藏、👍订阅专栏
推荐阅读
【YOLOv5】LabVIEW+TensorRT的yolov5部署实战(含源码))
【YOLOv5】手把手教你使用LabVIEW ONNX Runtime部署 TensorRT加速,实现YOLOv5实时物体识别(含源码)
【YOLOv8】实战一:手把手教你使用YOLOv8实现实时目标检测
【YOLOv8】实战二:YOLOv8 OpenVINO2022版 windows部署实战
【YOLOv8】实战三:基于LabVIEW TensorRT部署YOLOv8
【YOLOv9】实战一:在 Windows 上使用LabVIEW OpenVINO工具包部署YOLOv9实现实时目标检测(含源码)
【YOLOv9】实战二:手把手教你使用TensorRT实现YOLOv9实时目标检测(含源码)
👇技术交流 · 一起学习 · 咨询分享,请联系👇


















 1391
1391

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











