



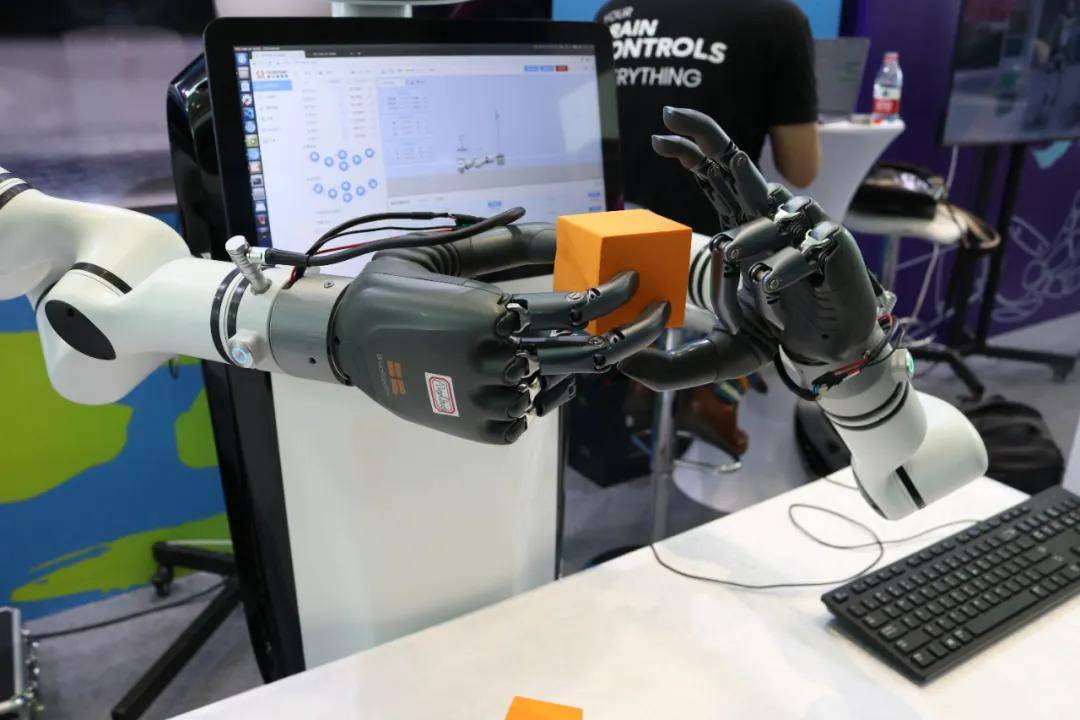
从人类的手部动作到机器人的精准操控,手一直是与物理世界交互最直接、最高效的载体。同样,在机器人产业中,机械臂与灵巧手作为执行复杂任务的核心部件,正广泛应用于工业制造、医疗手术、家庭服务等场景。随着机器人技术的快速发展,灵巧手因其近似人手的结构和自由度,能够完成如远程手术、精细抓取、家居服务等高精度操作,成为具身智能领域的关键突破点。
*素材源于网络
然而,实现灵巧手的拟人化运动并非易事,其背后需要海量、多样化的动作数据作为训练基础。动作捕捉技术作为高效的数据采集手段,为灵巧手的训练提供了关键支持。通过捕捉真人手部的自然动作,可快速构建高质量数据集,加速机器学习与行为建模进程。
基于此,灵巧手虚拟仿真方案,该方案具备以下优势:
1. 高精度数据采集:采用mHand Pro惯性动捕手套,配备16个高精度传感器,可精准捕捉手指细微动作,数据稳定可靠;
2. 跨平台仿真支持:支持在Windows系统的MuJoCo仿真平台中实现动捕数据重定向,实时驱动宇树Dex3-1三指灵巧手与因时DFQ/FTP五指灵巧手,完成从人手动作到机器手的无缝映射;
3. 开发效率提升:提供完整的SDK与数据接口,显著降低开发复杂度,支持快速迭代与多场景适配。
此外,mHand Pro手套采用防菌可拆卸布料,兼具舒适性与卫生性,适合长时间穿戴使用。

还提供全栈动捕解决方案,包括27节点VDSuitFull、31节点DreamsCapX1全身动捕系统、mHandPro数据手套、7摄像头无穿戴动捕系统及光学动捕场地,可覆盖各类动作采集需求。同时,公司合作专业动捕演员,可提供武术、舞蹈、体育等高难度动作数据,助力多行业应用开发。
配套的专业动捕软件支持高效数据导出与第三方集成,具备SDK接口,简单易用,助力开发者快速构建智能灵巧手系统,推动机器人技术从实验室走向真实世界。

















 556
556

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









