



 本文详细介绍了Unity中的NavMesh系统,它基于A*算法为游戏角色提供路径规划。NavMesh将场景划分为可行走和不可行走区域,并通过广度优先搜索(BFS)和深度优先搜索(DFS)寻找最短路径。同时,讨论了动态障碍物的处理方法,包括使用Navmesh的AreaMask和NavmeshObstacle组件。此外,还提到了关键函数如NavMesh.SamplePosition用于采样路径上的位置。文章最后分享了两种处理动态障碍物的解决方案,一种基于带Collider的游戏对象,另一种通过直接更新NavMesh的可行走区域。
本文详细介绍了Unity中的NavMesh系统,它基于A*算法为游戏角色提供路径规划。NavMesh将场景划分为可行走和不可行走区域,并通过广度优先搜索(BFS)和深度优先搜索(DFS)寻找最短路径。同时,讨论了动态障碍物的处理方法,包括使用Navmesh的AreaMask和NavmeshObstacle组件。此外,还提到了关键函数如NavMesh.SamplePosition用于采样路径上的位置。文章最后分享了两种处理动态障碍物的解决方案,一种基于带Collider的游戏对象,另一种通过直接更新NavMesh的可行走区域。
NavMesh
NavMesh基于A*算法的扩展,基于场景的可行走和不可行走区域,把场景分成众多不规则的三角形,计算某两个点所在的三角形Mesh的距离,根据区域不同的Cost,采用广度优先的遍历,找到一条最短路径。
广度优先搜索(Breadth First Search,简称BFS)
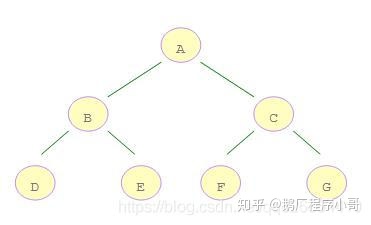
假设从A节点出发,在访问了该节点之后依次访问这个节点各个未曾访问过的邻接点,然后分别从这些邻接点出发依次访问它们的邻接点。重复此步骤,直到所有的节点都被访问完为止。
如上图,广度优先搜索的顺序是:ABCDEFG
深度优先搜索(Depth First Search,简称DFS)
假设从A节点出发,首先访问该节点,然后依次从它的各个未被访问的邻接点出发,访问邻接点的邻接点。重复此步骤,直到所有的节点都被访问完为止。
如上图,深度优先搜索的顺序是:ABDECFG
广度优先搜索和深度优先搜索的具体实现:
https://blog.youkuaiyun.com/qq826364410/article/details/87372171
Navigation Area导航区域
Walkable 可行走区域
Not Walkable 不可行走区域
Jump 跳转区域
Bake烘焙
Agent Radius 导航代理的半径
Agent Height 导航代理的高度
Max Slope 可以行走的最大坡度
Step Height 导航代理可以攀爬的高度
NavMeshAgent
Area Mask 可以用来设置不可行走的层
动态阻挡
Unity提供的两种方案:
-
固定位置的动态障碍物使用Navmesh的AreaMask,
-
不固定位置的动态障碍物使用Navmesh obstacle
基于A*算法的两种方案:
动态障碍物状态更新时,都需要重新计算“可行走”网格,即把障碍物所在区域改成可行走,重新设置整个网格的“可行走”区域,让寻路变得正确。这个astar插件已经基本做好了,读者可以查阅其文档即可。
大致说一下2种解决方法:
1.astar的动态障碍物实例脚本是这样的:一个带collider的gameobject,每次移动都调用一下:
//oldbounds表示旧位置的bounds,new表示新位置的包围盒立方体
AstarPath
.
active
.
UpdateGraphs
(
oldbounds
)
;
AstarPath
.
active
.
UpdateGraphs
(
newbounds
)
;
其实就是刷新一下网格某个区域,对这个区域的每个网点检测:如果被带collider的物体占据,则不可行走,否则可行走。这明显可以解决随意位置动态障碍问题,并且用法简单,可以考虑。
2.还有另外一种方法:不依赖collider,直接输入一个bounds,然后把这个bounds和整个网格相交,得到需要更新的bounds区域,然后直接对整个区域的网点node进行设置是否可行走。
NavMesh.SamplePosition
NavMesh
.
SamplePosition(Vector3 sourcePosition,
out
AI
.
NavMeshHit hit,
float
maxDistance,
int
areaMask)
;
通过对NavMesh采样,返回指定范围内最近的点。
sourcePosition 样本查询的来源。
hit 保存结果位置的属性。
maxDistance 距离sourcePosition这个距离内的样本,最好是代理高度的2倍。
areaMask 一个掩码,指定在找到最近点时允许哪些NavMesh区域。
本文经作者同意,转自知乎@鹅厂程序小哥(https://www.zhihu.com/people/tencentboy),原文链接(https://zhuanlan.zhihu.com/p/339380697)

















 273
273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









