









2.4.1. Overall System Configuration 整体系统配置
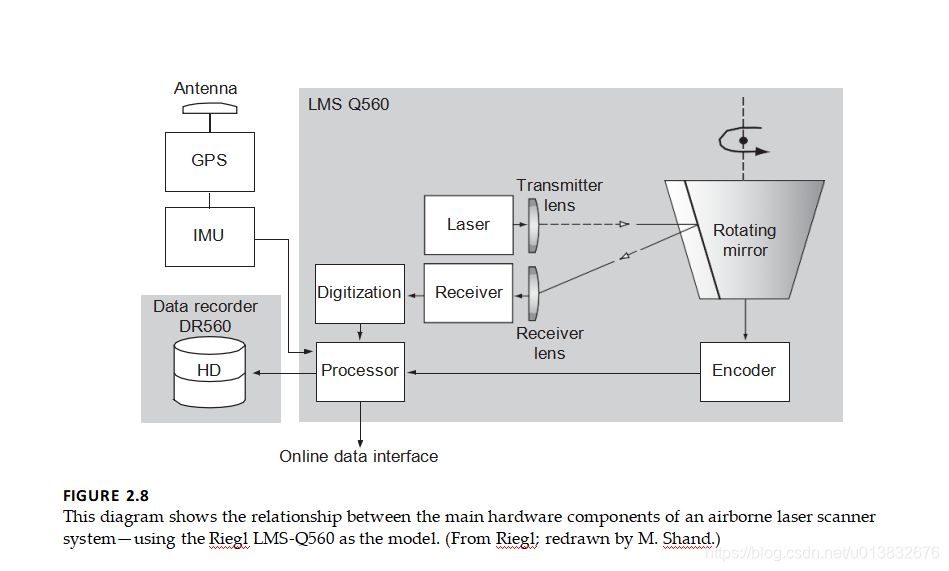
一个典型的机载激光扫描仪包括一下几个主要组成部分:
1、基本的激光测距单元,包括发射和接收装置,这部分在第一章节内容中介绍过;
2、一个光学扫描机构,比如旋转棱镜机构,目的是实现和飞行轨迹垂直方向的地形扫描;
3、一个电子控制系统,能够实现多个硬件的集成和同步,通过控制和处理各个组件实现系统的稳定工作;
4、一套位姿系统,通常是继承了差分GPS和惯性测量单元的系统,这套系统的作用至关重要;
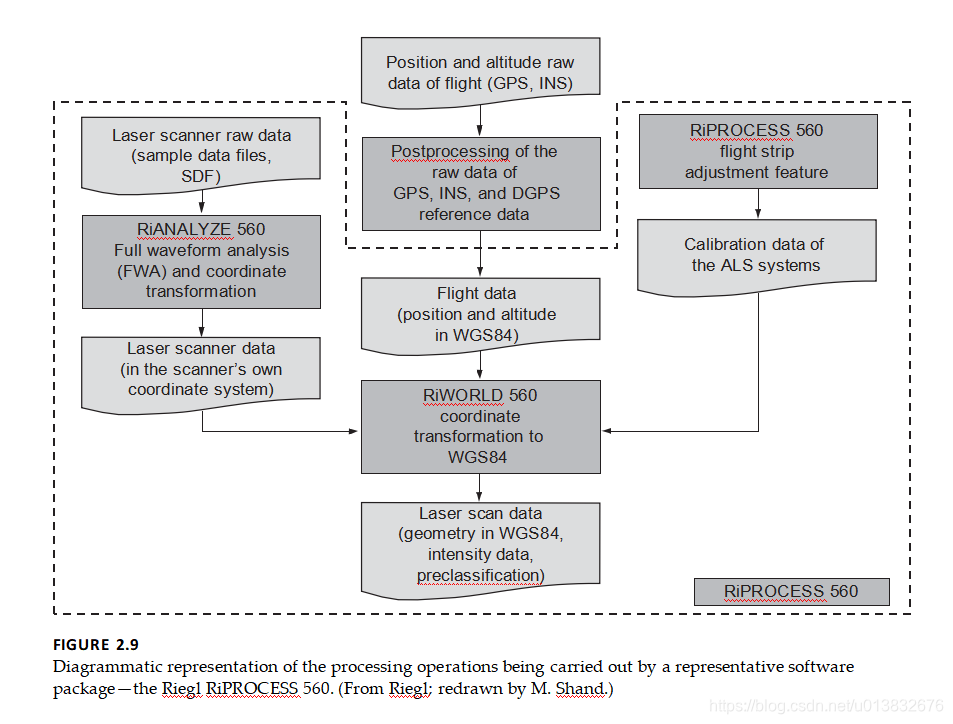
5、软件——数据的采集、存储控制,数据的预处理都需要专用软件,数据后处理也需要专门的激光雷达点云数据处理软件;
6、除了以上必备的系统之外,通常还会配置一套影像数据采集设备,可以是数码相机、视频相机或者是推扫相机。
系统组成如图2.8所示。
2.4.2. System Components 系统组件
下面将对整个系统中各个组成部分进行进行更详细的介绍。
第一章已经对激光测距装置的技术和操作进行了讨论。 机载激光扫描仪中使用的测距仪单元将包括激光器;发射和接收组件;以及接收探测系统,计时器和数字化系统,实际上,由于机载平台的远距离测量的应用场景,测距方式通畅使用的是tof形式,即time of flight方式。斯图加特大学的导航研究所的ScaLARS系统是一个例外,他使用的是CW激光,也就是相位式激光雷达,进行测距。
1.激光测距单元的输出端的刚性连接着光学扫描机构。 顾名思义,它使用光学元件,如旋转平面或多棱镜或光纤线阵,以已知的角度进行地形测量,告诉扫描的激光测量线,相对于机载平台飞行路径是垂直的。这条连续的扫描线就构造了一条轮廓线, 在飞行方向上和垂直于飞行方向上,两个方向进行的连续距离测量和角度同步记录,以此可以扫描大范围的地形。
2.电控单元通常以计算机为基础,配置有显示终端和交互界面,操作人员可以通过命令接口执行一系列的操作指令。除了专用的计算机,还需要一些必要的硬件接口和板卡。除了控制一系列的硬件系统,该单元还控制着数据采集和存储,数据包括时间数据、波形数据、以及扫描系统的角度数据等,同事还要实现gps接收机和IMU单元的时间同步匹配。现在数据的存储主要依赖的是机械硬盘或者是固态存储介质,之前的数据存储还有通过数据磁带的。
位姿系统记录的是不同形式的导航和姿态原始数据——包括GPS记录数据、角度和加速度数据,飞行过程中记录的都是原始的数据,在完成飞行任务之后,这些数据要经过后处理过程进行解算。硬件端的gps和imu一般都是深度集成的,通常都是一些板卡,集成度很高,当然一些独立的设备也是可以用的。GPS差分处理除了平台端的移动数据外还需要地面几站的gps参考数据,这个参考数据的来源通常有四个途径:(1)通过独立的GPS基准站,进行地面控制点同步定位数据采集;(2)通过使用广域服务实时发布的卫星差分数据,类似于OmniSTAR系统提供的基于互联网发布的基站数据;(3)使用区域网络提供的差分参考数据,也就是使用CORS站数据(Continuously Operating Reference Stations);(4)使用PPP技术(Precise Point Positioning),该技术基于使用IGS提供的卫星轨道和时钟校准服务,通过互联网获取GPS地面几站数据,如果类似于Omni STAR的广域服务被应用,就需要配置一个OmniSTAR-ready GPS 接收机或者一个额外的OmniSTAR L-波段接收机。这个技术支持飞行中实时处理,其他的几个都需要进行后处理。有时候差分数据的获取要等比较长的时间。
3.在整个业务流程中,不同的任务阶段都需要有对应的软件来满足功能需求,最初需要一个软件进行任务规划,一般指的是航线规划软件,这个一般要在驾驶舱的导航显示器上显示出来,用以知道飞行员执行飞行任务。另一个功能就是进行传感器的设置,包括扫描频率、脉冲频率、扫描角度等,另一个功能就是整个系统的数据采集和存储控制,所有的数据同步的时间标签都是由GPS接收机获取的时间来同步,最终软件需要进行数据的预处理,用以实现外业数据的检查。
4.应用最广泛的影像采集设备就是中小型的数字相机,通常该系统是和激光测距系统刚性连接的,也有一些激光扫描系统是将相机作为了系统的一部分进行了内部集成——例如TopoSys Falcon II系统。

















 3071
3071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









