 仿射变换原理与矩阵构造
仿射变换原理与矩阵构造





注:本文为 “仿射变换” 相关合辑。
图片清晰度受引文原图所限。
略作重排,未整理去重。
如有内容异常,请看原文。
仿射变换(Affine Transformation)原理及应用
Godswisdom 于 2019-08-09 17:35:59 发布
1 仿射变换的定义与几何不变性
1.1 定义
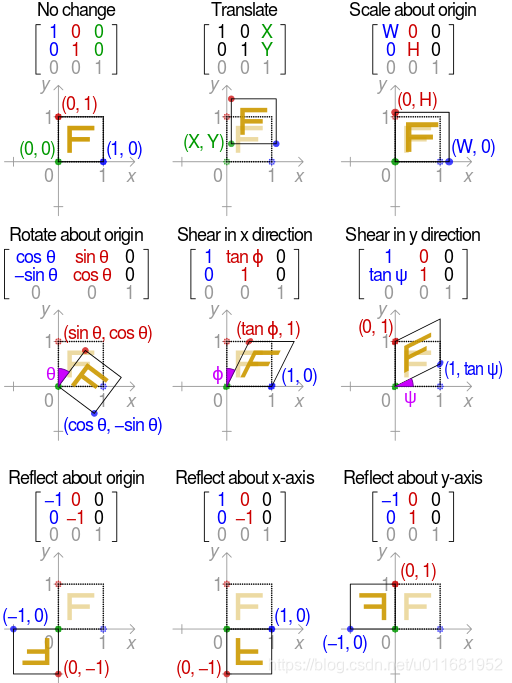
仿射变换(Affine Transformation)是线性变换与平移变换的复合运算,涵盖缩放(Scale)、平移(Translation)、旋转(Rotation)、反射(Reflection)、错切(Shear Mapping)等具体形式。其特征表现为:变换前后直线的线性特征保持不变,平行线仍为平行线。
1.2 几何不变性
仿射变换过程中,以下几何性质保持不变:
- 凸性:变换前的凸集,变换后仍为凸集;
- 共线性:若多个点在变换前共线,则变换后仍保持共线关系;
- 平行性:若两条直线在变换前平行,则变换后仍保持平行关系;
- 共线比例不变性:变换前同一直线上两条线段的长度比例,变换后保持不变。
2 仿射变换的数学表达形式
2.1 一般形式
设集合
X
X
X 中的任意元素
x
x
x,其仿射变换可表示为:
f
(
x
)
=
A
x
+
b
,
x
∈
X
f(x) = Ax + b, \quad x \in X
f(x)=Ax+b,x∈X
其中,
A
A
A 为线性变换矩阵,
b
b
b 为平移向量。该形式清晰体现了仿射变换“线性变换+平移”的复合本质。
2.2 二维图像中的齐次坐标表示
在二维图像变换场景中,为将线性变换与平移变换统一为矩阵乘法形式(便于计算机并行计算与复合变换推导),需引入齐次坐标(将二维点 ( x , y ) (x, y) (x,y) 扩展为三维向量 ( x , y , 1 ) (x, y, 1) (x,y,1))。此时仿射变换的矩阵表达式为:
[ x ′ y ′ 1 ] = [ R 00 R 01 T x R 10 R 11 T y 0 0 1 ] [ x y 1 ] \begin{bmatrix} x' \\ y' \\ 1 \end{bmatrix} = \begin{bmatrix} R_{00} & R_{01} & T_x \\ R_{10} & R_{11} & T_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} x′y′1 = R00R100R01R110TxTy1 xy1
该矩阵可拆解为两部分:
- 线性变换模块:由 2 × 2 2 \times 2 2×2 矩阵 [ R 00 R 01 R 10 R 11 ] \begin{bmatrix} R_{00} & R_{01} \\ R_{10} & R_{11} \end{bmatrix} [R00R10R01R11] 实现,负责缩放、旋转、反射、错切等操作;
- 平移变换模块:由向量 ( T x , T y ) (T_x, T_y) (Tx,Ty) 实现,对应矩阵第三列的前两个元素,负责图形的位置偏移。
齐次坐标表示的优势在于:可通过矩阵乘法实现多个仿射变换的复合(如先旋转后平移),无需单独处理平移向量,简化了变换的串联计算。
3 仿射变换的具体形式与矩阵构造逻辑
3.1 平移变换
平移变换仅改变图形的位置,不改变图形的形状、大小与方向。此时线性变换模块为单位矩阵(不改变原始坐标的线性关系),平移向量
(
T
x
,
T
y
)
(T_x, T_y)
(Tx,Ty) 决定平移的方向与距离。其变换矩阵为:
M
=
[
1
0
T
x
0
1
T
y
0
0
1
]
M = \begin{bmatrix} 1 & 0 & T_x \\ 0 & 1 & T_y \\ 0 & 0 & 1 \end{bmatrix}
M=
100010TxTy1
其中,
T
x
T_x
Tx 为
x
x
x 轴方向的平移量(正值向右,负值向左),
T
y
T_y
Ty 为
y
y
y 轴方向的平移量(正值向下/向上,取决于坐标系定义)。
3.2 反射变换
反射变换(镜像变换)是图形关于某条直线的对称变换,其本质是改变坐标轴的符号方向。以常见的“关于
x
x
x 轴反射”为例,变换后
x
x
x 坐标保持不变,
y
y
y 坐标取反,其变换矩阵为:
M
=
[
1
0
0
0
−
1
0
0
0
1
]
M = \begin{bmatrix} 1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & 1 \end{bmatrix}
M=
1000−10001
若需实现关于
y
y
y 轴反射,只需将矩阵中
x
x
x 坐标对应的系数取反,即
[ − 1 0 0 0 1 0 0 0 1 ] \begin{bmatrix} -1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} −100010001
3.3 旋转变换
旋转变换的关键是确定旋转矩阵中 sin θ \sin\theta sinθ 的符号,该符号由坐标原点位置和旋转方向共同决定。以下分两种典型坐标系场景推导矩阵构造逻辑:
3.3.1 坐标系 1:原点为左下角(数学标准坐标系)
该坐标系中, x x x 轴向右, y y y 轴向上,符合数学中的平面直角坐标系定义。
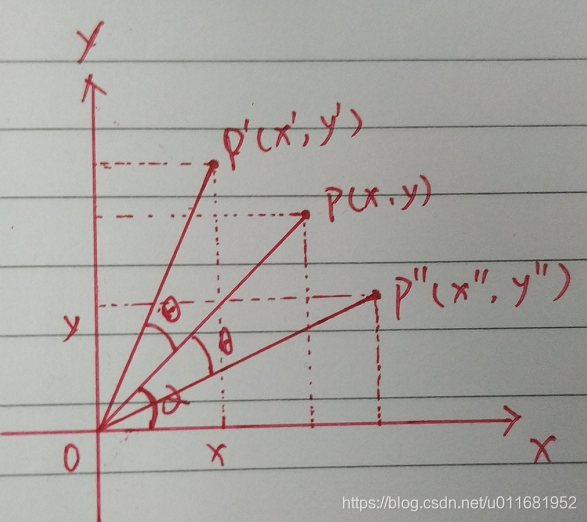
设点
P
(
x
,
y
)
P(x, y)
P(x,y) 到原点的距离为 1(单位向量),与
x
x
x 轴夹角为
α
\alpha
α,则其坐标可由三角函数表示为:
{
x
=
cos
α
y
=
sin
α
\begin{cases} x = \cos\alpha \\ y = \sin\alpha \end{cases}
{x=cosαy=sinα
-
逆时针旋转 θ \theta θ 角:
根据三角函数和角公式 cos ( α + θ ) = cos α cos θ − sin α sin θ \cos(\alpha+\theta) = \cos\alpha\cos\theta - \sin\alpha\sin\theta cos(α+θ)=cosαcosθ−sinαsinθ、 sin ( α + θ ) = sin α cos θ + cos α sin θ \sin(\alpha+\theta) = \sin\alpha\cos\theta + \cos\alpha\sin\theta sin(α+θ)=sinαcosθ+cosαsinθ,旋转后点 P ′ ( x ′ , y ′ ) P'(x', y') P′(x′,y′) 的坐标为:
{ x ′ = x cos θ − y sin θ y ′ = x sin θ + y cos θ \begin{cases} x' = x\cos\theta - y\sin\theta \\ y' = x\sin\theta + y\cos\theta \end{cases} {x′=xcosθ−ysinθy′=xsinθ+ycosθ
对应的旋转矩阵(线性变换模块)为:
R ′ = [ cos θ − sin θ sin θ cos θ ] R' = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} R′=[cosθsinθ−sinθcosθ] -
顺时针旋转 θ \theta θ 角:
同理,利用差角公式 cos ( α − θ ) = cos α cos θ + sin α sin θ \cos(\alpha-\theta) = \cos\alpha\cos\theta + \sin\alpha\sin\theta cos(α−θ)=cosαcosθ+sinαsinθ、 sin ( α − θ ) = sin α cos θ − cos α sin θ \sin(\alpha-\theta) = \sin\alpha\cos\theta - \cos\alpha\sin\theta sin(α−θ)=sinαcosθ−cosαsinθ,旋转后点 P ′ ′ ( x ′ ′ , y ′ ′ ) P''(x'', y'') P′′(x′′,y′′) 的坐标为:
{ x ′ ′ = x cos θ + y sin θ y ′ ′ = − x sin θ + y cos θ \begin{cases} x'' = x\cos\theta + y\sin\theta \\ y'' = -x\sin\theta + y\cos\theta \end{cases} {x′′=xcosθ+ysinθy′′=−xsinθ+ycosθ
对应的旋转矩阵为:
R ′ ′ = [ cos θ sin θ − sin θ cos θ ] R'' = \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} R′′=[cosθ−sinθsinθcosθ]
3.3.2 坐标系 2:原点为左上角(图像坐标系,如 OpenCV)
图像处理中,坐标系通常定义为:原点在图像左上角, x x x 轴向右, y y y 轴向下。

该坐标系的 y y y 轴方向与数学标准坐标系相反,导致旋转矩阵的符号规则发生变化:
-
逆时针旋转 θ \theta θ 角:
由于 y y y 轴方向反转,逆时针旋转的效果等价于数学标准坐标系中顺时针旋转 θ \theta θ 角,旋转矩阵为:
R ′ = [ cos θ sin θ − sin θ cos θ ] R' = \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} R′=[cosθ−sinθsinθcosθ] -
顺时针旋转 θ \theta θ 角:
同理,其效果等价于数学标准坐标系中逆时针旋转 θ \theta θ 角,旋转矩阵为:
R ′ ′ = [ cos θ − sin θ sin θ cos θ ] R'' = \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} R′′=[cosθsinθ−sinθcosθ]
3.3.3 旋转变换矩阵总结
旋转矩阵中 sin θ \sin\theta sinθ 的符号由“坐标原点位置”和“旋转方向”共同决定,规律如下:
| 坐标系类型 | 逆时针旋转 θ \theta θ 角的矩阵 | 顺时针旋转 θ \theta θ 角的矩阵 |
|---|---|---|
| 原点在左下角 | [ cos θ − sin θ sin θ cos θ ] \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} [cosθsinθ−sinθcosθ] | [ cos θ sin θ − sin θ cos θ ] \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} [cosθ−sinθsinθcosθ] |
| 原点在左上角(OpenCV) | [ cos θ sin θ − sin θ cos θ ] \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{bmatrix} [cosθ−sinθsinθcosθ] | [ cos θ − sin θ sin θ cos θ ] \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} [cosθsinθ−sinθcosθ] |
3.4 错切变换(补充)
错切变换是一种线性变换,其特点是图形的一边保持固定,另一边沿某一方向产生偏移,导致图形发生“剪切”变形。常见的错切变换分为 x x x 轴方向错切和 y y y 轴方向错切:
-
x x x 轴方向错切( y y y 坐标影响 x x x 坐标):
M = [ 1 k 0 0 1 0 0 0 1 ] M = \begin{bmatrix} 1 & k & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} M= 100k10001
其中, k k k 为错切系数, k > 0 k>0 k>0 时向右错切, k < 0 k<0 k<0 时向左错切。 -
y y y 轴方向错切( x x x 坐标影响 y y y 坐标):
M = [ 1 0 0 k 1 0 0 0 1 ] M = \begin{bmatrix} 1 & 0 & 0 \\ k & 1 & 0 \\ 0 & 0 & 1 \end{bmatrix} M= 1k0010001
其中, k k k 为错切系数, k > 0 k>0 k>0 时向下错切, k < 0 k<0 k<0 时向上错切。
4 OpenCV 中的仿射变换实现
OpenCV 作为计算机视觉领域的开源库,提供了成熟的仿射变换接口,其中 getRotationMatrix2D 函数是生成旋转+缩放+平移复合变换矩阵的重要工具。
4.1 函数原型与参数说明
CV_EXPORTS_W Mat getRotationMatrix2D( Point2f center, double angle, double scale );
- 参数详解:
center:源图像的旋转中心(二维坐标点 ( c e n t e r . x , c e n t e r . y ) (center.x, center.y) (center.x,center.y)),用于指定旋转操作的基准点;angle:旋转角度(单位为度),遵循 OpenCV 坐标系规则(原点在左上角),正值表示逆时针旋转;scale:图像的各向同比缩放因子( s c a l e > 1 scale>1 scale>1 时放大, 0 < s c a l e < 1 0<scale<1 0<scale<1 时缩小)。
4.2 生成的仿射矩阵形式
函数输出为
2
×
3
2 \times 3
2×3 矩阵(省略齐次坐标的第三行
[
0
,
0
,
1
]
[0, 0, 1]
[0,0,1],符合 OpenCV 中 warpAffine 函数的输入要求),形式如下:
[
α
β
(
1
−
α
)
⋅
c
e
n
t
e
r
.
x
−
β
⋅
c
e
n
t
e
r
.
y
−
β
α
β
⋅
c
e
n
t
e
r
.
x
+
(
1
−
α
)
⋅
c
e
n
t
e
r
.
y
]
\begin{bmatrix} \alpha & \beta & (1 - \alpha) \cdot center.x - \beta \cdot center.y \\ -\beta & \alpha & \beta \cdot center.x + (1 - \alpha) \cdot center.y \end{bmatrix}
[α−ββα(1−α)⋅center.x−β⋅center.yβ⋅center.x+(1−α)⋅center.y]
其中,
α
=
s
c
a
l
e
⋅
cos
θ
\alpha = scale \cdot \cos\theta
α=scale⋅cosθ,
β
=
s
c
a
l
e
⋅
sin
θ
\beta = scale \cdot \sin\theta
β=scale⋅sinθ(
θ
\theta
θ 为 angle 转换后的弧度值,即
θ
=
a
n
g
l
e
×
π
180
\theta = angle \times \frac{\pi}{180}
θ=angle×180π)。
4.3 矩阵构造的底层逻辑
该矩阵的构造过程是三次变换的复合(按“先平移→再缩放旋转→最后逆平移”的顺序),具体推导如下:
-
第一步:平移变换——将旋转中心移至坐标原点
为使旋转围绕指定中心进行,需先将该中心平移至原点,变换矩阵为:
T 1 = [ 1 0 − c e n t e r . x 0 1 − c e n t e r . y 0 0 1 ] T_1 = \begin{bmatrix} 1 & 0 & -center.x \\ 0 & 1 & -center.y \\ 0 & 0 & 1 \end{bmatrix} T1= 100010−center.x−center.y1 -
第二步:缩放与旋转变换——复合操作
先按scale因子缩放图像,再按angle旋转图像,两者的复合矩阵(齐次坐标形式)为:
S ⋅ R = [ s c a l e 0 0 0 s c a l e 0 0 0 1 ] ⋅ [ cos θ sin θ − sin θ cos θ 0 0 1 ] = [ α β 0 − β α 0 0 0 1 ] S \cdot R = \begin{bmatrix} scale & 0 & 0 \\ 0 & scale & 0 \\ 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \\ 0 & 0 & 1 \end{bmatrix} = \begin{bmatrix} \alpha & \beta & 0 \\ -\beta & \alpha & 0 \\ 0 & 0 & 1 \end{bmatrix} S⋅R= scale000scale0001 ⋅ cosθ−sinθ0sinθcosθ01 = α−β0βα0001
其中, α = s c a l e ⋅ cos θ \alpha = scale \cdot \cos\theta α=scale⋅cosθ, β = s c a l e ⋅ sin θ \beta = scale \cdot \sin\theta β=scale⋅sinθ,体现了缩放与旋转的耦合关系。 -
第三步:逆平移变换——将旋转中心移回原位置
缩放旋转完成后,需将原点处的旋转中心移回原始坐标,变换矩阵为:
T 2 = [ 1 0 c e n t e r . x 0 1 c e n t e r . y 0 0 1 ] T_2 = \begin{bmatrix} 1 & 0 & center.x \\ 0 & 1 & center.y \\ 0 & 0 & 1 \end{bmatrix} T2= 100010center.xcenter.y1 -
复合变换矩阵推导
三次变换的复合顺序为 T 2 ⋅ ( S ⋅ R ) ⋅ T 1 T_2 \cdot (S \cdot R) \cdot T_1 T2⋅(S⋅R)⋅T1,展开计算如下:
T 2 ⋅ ( S ⋅ R ) ⋅ T 1 = [ 1 0 c e n t e r . x 0 1 c e n t e r . y 0 0 1 ] ⋅ [ α β 0 − β α 0 0 0 1 ] ⋅ [ 1 0 − c e n t e r . x 0 1 − c e n t e r . y 0 0 1 ] = [ α β ( 1 − α ) ⋅ c e n t e r . x − β ⋅ c e n t e r . y − β α β ⋅ c e n t e r . x + ( 1 − α ) ⋅ c e n t e r . y 0 0 1 ] \begin{align*} T_2 \cdot (S \cdot R) \cdot T_1 &= \begin{bmatrix} 1 & 0 & center.x \\ 0 & 1 & center.y \\ 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} \alpha & \beta & 0 \\ -\beta & \alpha & 0 \\ 0 & 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} 1 & 0 & -center.x \\ 0 & 1 & -center.y \\ 0 & 0 & 1 \end{bmatrix} \\ &= \begin{bmatrix} \alpha & \beta & (1 - \alpha) \cdot center.x - \beta \cdot center.y \\ -\beta & \alpha & \beta \cdot center.x + (1 - \alpha) \cdot center.y \\ 0 & 0 & 1 \end{bmatrix} \end{align*} T2⋅(S⋅R)⋅T1= 100010center.xcenter.y1 ⋅ α−β0βα0001 ⋅ 100010−center.x−center.y1 = α−β0βα0(1−α)⋅center.x−β⋅center.yβ⋅center.x+(1−α)⋅center.y1
省略第三行后,即得到getRotationMatrix2D函数输出的 2 × 3 2 \times 3 2×3 矩阵。
4.4 函数源码解析
以下为 getRotationMatrix2D 函数的实现代码(基于 OpenCV 源码简化),与上述推导逻辑完全一致:
cv::Mat cv::getRotationMatrix2D( Point2f center, double angle, double scale )
{
CV_INSTRUMENT_REGION(); // 性能监控标记
angle *= CV_PI / 180; // 角度转换为弧度
double alpha = std::cos(angle) * scale; // 缩放+旋转的x方向系数
double beta = std::sin(angle) * scale; // 缩放+旋转的y方向系数
Mat M(2, 3, CV_64F); // 创建2×3的64位浮点型矩阵
double* m = M.ptr<double>(); // 获取矩阵数据指针
m[0] = alpha;
m[1] = beta;
// 平移分量计算:对应矩阵第三列第一行
m[2] = (1 - alpha) * center.x - beta * center.y;
m[3] = -beta;
m[4] = alpha;
// 平移分量计算:对应矩阵第三列第二行
m[5] = beta * center.x + (1 - alpha) * center.y;
return M;
}
5 参考文献
[1] 仿射变换详解 warpAffine
https://www.cnblogs.com/dupuleng/articles/4055020.html
[2] 仿射变换(Affine Transformation)
https://blog.youkuaiyun.com/robert_chen1988/article/details/80498805
[3] OpenCV 学习(三十五)之仿射变换 warpAffine.
https://blog.youkuaiyun.com/keith_bb/article/details/56331356
[4] OpenCV 官方文档. getRotationMatrix2D
https://docs.opencv.org/
图像坐标空间变换:仿射变换(Affine Transformation)
拜阳 原创于 2020-05-04 19:32:44 发布
仿射变换(Affine Transformation)简介
仿射变换的定义为:对一个向量空间依次执行一次线性变换(linear transformation)和一次平移(translation),将其映射至另一个向量空间的操作。
仿射变换对点、线、面具有特定的不变性,具体表现为:
- 变换后,点仍为点,线仍为线,面仍为面(若为 3D 投影变换,在特定视角下,面可能退化为线,线可能退化为点);
- 变换后,平行线与平行面的平行性保持不变;
- 变换后,图形间的部分比例关系维持恒定,例如两条平行线的长度比、点在线段中的位置比例均不发生改变。
注意:仿射变换无法保证角度的不变性。
仿射变换的基础类型
仿射变换的基础形式包含恒等(identity)、尺度(scaling)、旋转(rotation)、剪切(shear)、镜像(reflection)与平移(translation)。其中,除平移外,其余类型均属于线性变换。线性变换通过矩阵乘法实现,平移则通过向量加法实现。
上述基础变换类型的划分依据为变换效果,从数学角度而言并非严格互斥,存在包含关系,例如恒等变换可视为宽高方向缩放倍数均为 1 的尺度变换。该分类方式无需过度深究,因其更贴合图像领域的常规认知习惯。
下文将采用线性方程组与矩阵两种形式,对各类变换进行数学描述。
首先进行符号约定:使用
(
u
,
v
)
(u, v)
(u,v) 表示原始图像中的坐标,使用
(
x
,
y
)
(x, y)
(x,y) 表示变换后图像的坐标。
在矩阵乘法表达式中,坐标以行向量形式置于左侧,变换矩阵置于右侧。此形式的优势在于,使用 numpy、tensorflow 等具备向量化矩阵乘法算子的工具时,无需对坐标矩阵调整通道维度并执行 reshape 操作。若不关注代码实现的便利性,将变换矩阵置于左侧、坐标以列向量形式置于右侧亦可行,部分教科书也采用该形式。
恒等
线性方程组形式:
{
x
=
u
y
=
v
\begin{cases} x = u \\ y = v \end{cases}
{x=uy=v
矩阵形式:
[
x
y
]
=
[
u
v
]
[
1
0
0
1
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix}
[xy]=[uv][1001]
尺度
线性方程组形式:
{
x
=
α
u
y
=
β
v
\begin{cases} x = \alpha u \\ y = \beta v \end{cases}
{x=αuy=βv
矩阵形式:
[
x
y
]
=
[
u
v
]
[
α
0
0
β
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} \alpha & 0 \\ 0 & \beta \end{bmatrix}
[xy]=[uv][α00β]
旋转
线性方程组形式:
{
x
=
cos
(
θ
)
u
−
sin
(
θ
)
v
y
=
sin
(
θ
)
u
+
cos
(
θ
)
v
\begin{cases} x = \cos(\theta) u - \sin(\theta) v \\ y = \sin(\theta) u + \cos(\theta) v \end{cases}
{x=cos(θ)u−sin(θ)vy=sin(θ)u+cos(θ)v
矩阵形式:
[
x
y
]
=
[
u
v
]
[
cos
(
θ
)
sin
(
θ
)
−
sin
(
θ
)
cos
(
θ
)
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta) \end{bmatrix}
[xy]=[uv][cos(θ)−sin(θ)sin(θ)cos(θ)]
剪切
剪切变换分为水平剪切与垂直剪切,分别表述如下:
水平剪切
线性方程组形式:
{
x
=
u
+
s
v
v
y
=
v
\begin{cases} x = u + s_v v \\ y = v \end{cases}
{x=u+svvy=v
矩阵形式:
[
x
y
]
=
[
u
v
]
[
1
0
s
v
1
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} 1 & 0 \\ s_v & 1 \end{bmatrix}
[xy]=[uv][1sv01]
垂直剪切
线性方程组形式:
{
x
=
u
y
=
s
u
u
+
v
\begin{cases} x = u \\ y = s_u u + v \end{cases}
{x=uy=suu+v
矩阵形式:
[
x
y
]
=
[
u
v
]
[
1
s
u
0
1
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} 1 & s_u \\ 0 & 1 \end{bmatrix}
[xy]=[uv][10su1]
镜像
线性方程组形式:
{
x
=
−
u
y
=
v
\begin{cases} x = -u \\ y = v \end{cases}
{x=−uy=v
矩阵形式:
[
x
y
]
=
[
u
v
]
[
−
1
0
0
1
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} -1 & 0 \\ 0 & 1 \end{bmatrix}
[xy]=[uv][−1001]
平移
线性方程组形式:
{
x
=
u
+
t
x
y
=
v
+
t
y
\begin{cases} x = u + t_x \\ y = v + t_y \end{cases}
{x=u+txy=v+ty
矩阵形式:
[
x
y
]
=
[
u
v
]
+
[
t
x
t
y
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} + \begin{bmatrix} t_x & t_y \end{bmatrix}
[xy]=[uv]+[txty]
多个线性变换矩阵相乘可实现基础线性变换的叠加,例如同时实现旋转与尺度变换的表达式为:
[
x
y
]
=
[
u
v
]
[
α
0
0
β
]
[
cos
(
θ
)
sin
(
θ
)
−
sin
(
θ
)
cos
(
θ
)
]
\begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} \alpha & 0 \\ 0 & \beta \end{bmatrix} \begin{bmatrix} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta) \end{bmatrix}
[xy]=[uv][α00β][cos(θ)−sin(θ)sin(θ)cos(θ)]
实际计算时,通常先将两个
2
×
2
2 \times 2
2×2 矩阵相乘,再与左侧坐标向量运算,仅需一次坐标变换即可完成复合变换。(上述公式仅展示单个点的坐标变换,实际应用中需对图像中
h
e
i
g
h
t
×
w
i
d
t
h
height \times width
height×width 个像素点执行坐标变换,该计算方式可显著降低运算量。)
仿射变换通式
各类基础变换可整合为仿射变换通式,其线性方程组形式为:
{
x
=
t
11
u
+
t
21
v
+
t
31
y
=
t
12
u
+
t
22
v
+
t
32
\begin{cases} x = t_{11} u + t_{21} v + t_{31} \\ y = t_{12} u + t_{22} v + t_{32} \end{cases}
{x=t11u+t21v+t31y=t12u+t22v+t32
该通式可通过三种方式表示为矩阵形式:
-
分离线性变换与平移的形式:
此形式符合仿射变换的基础定义,但实际应用中较少采用,因需执行两次矩阵运算(一次乘法、一次加法),运算流程不够简洁。
[ x y ] = [ u v ] [ t 11 t 12 t 21 t 22 ] + [ t 31 t 32 ] \begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v \end{bmatrix} \begin{bmatrix} t_{11} & t_{12} \\ t_{21} & t_{22} \end{bmatrix} + \begin{bmatrix} t_{31} & t_{32} \end{bmatrix} [xy]=[uv][t11t21t12t22]+[t31t32] -
融合线性变换与平移的形式:
该形式由线性方程组直接推导而来,仅需一次矩阵乘法即可完成线性变换与平移操作,是实际应用中最常用的形式。
[ x y ] = [ u v 1 ] [ t 11 t 12 t 21 t 22 t 31 t 32 ] \begin{bmatrix} x & y \end{bmatrix} = \begin{bmatrix} u & v & 1 \end{bmatrix} \begin{bmatrix} t_{11} & t_{12} \\ t_{21} & t_{22} \\ t_{31} & t_{32} \end{bmatrix} [xy]=[uv1] t11t21t31t12t22t32
将等号右侧第一个矩阵写为 [ u v 1 ] \begin{bmatrix} u & v & 1 \end{bmatrix} [uv1] 的形式,该坐标形式称为齐次坐标,具有重要的理论与应用价值。在 2D 图像仿射变换中,齐次坐标最直观的作用是将仿射变换通式整合为单次矩阵乘法,实现线性变换与平移的合并;而在透视变换(Projective Transformation)的推导中,齐次坐标是必需的数学工具,同时也是计算机图形学的基础之一。本文暂不展开讨论透视变换与图形学相关内容。 -
全齐次坐标形式:
该形式是第二种形式的延伸,将等号左侧也表示为齐次坐标,是教科书中最常见的形式。但在仿射变换场景下,变换矩阵的第三列固定为 [ 0 0 1 ] T \begin{bmatrix} 0 & 0 & 1 \end{bmatrix}^T [001]T,无实际意义且存在少量计算冗余,因此更推荐第二种形式。
[ x y 1 ] = [ u v 1 ] [ t 11 t 12 0 t 21 t 22 0 t 31 t 32 1 ] \begin{bmatrix} x & y & 1 \end{bmatrix} = \begin{bmatrix} u & v & 1 \end{bmatrix} \begin{bmatrix} t_{11} & t_{12} & 0 \\ t_{21} & t_{22} & 0 \\ t_{31} & t_{32} & 1 \end{bmatrix} [xy1]=[uv1] t11t21t31t12t22t32001
示例:人脸位置对齐
本节以人脸识别中的人脸位置对齐为例,说明仿射变换矩阵的求解方法及应用场景,以下为相关背景知识说明。
人脸识别是 2020 年深度学习领域最成功的应用方向之一。相较于行人重识别、ImageNet 通用分类等任务,在同等规模训练集(1000 万样本)与测试集(100 万样本)、测试集准确率达 95% 为合格标准的条件下,人脸识别更易达到合格要求,因此该任务本身的难度相对较低。其挑战在于极高的精度要求:95% 的准确率无法满足实际应用需求,例如人脸识别支付场景中,若每 100 笔订单存在 5 笔识别错误,将引发严重的安全问题。人脸识别的准确率需达到 99.999…%(小数点后多位 9),2019 年相关技术文档提出的指标为:在特定拒识率下,误识率不高于千万分之一(即对难以识别的人脸图像可拒绝识别,一旦确认识别则必须保证准确性)。
在高精度要求下,人脸识别的数据预处理流程与其他图像识别任务存在差异,人脸位置对齐是关键环节之一,可有效降低因位置偏差导致的误识别率。
具体流程为:完成人脸检测后,执行人脸特征点回归(通常 5 个特征点即可满足需求:双眼中心、鼻尖、双侧嘴角)。将回归得到的 5 个特征点坐标(记为 ( u , v ) (u, v) (u,v))配准至预定义的五点模板坐标(记为 ( x , y ) (x, y) (x,y))。由于特征点与模板坐标均为已知量,仿射变换通式中仅变换矩阵为未知量,可通过最小二乘法反推变换矩阵;再利用该矩阵对原始人脸图像执行坐标变换,完成位置对齐。
需补充说明的是,并非所有图像识别任务均可执行位置对齐。人脸识别能够实施该操作的前提是:人脸图像具有固定的结构模式,眉毛、眼睛、鼻子、嘴巴的相对位置不会发生显著偏移(例如眼睛不会出现在鼻子与嘴巴之间)。
注意事项:图像索引与坐标的对应关系
理论推导阶段通常无需引入图像索引(即常用的 ( i , j ) (i, j) (i,j)),但代码实现时必须使用,此时需特别注意图像索引与坐标的映射关系。图像索引中, i i i 表示行索引, j j j 表示列索引,对应关系如下:
i → 行 → y i \rightarrow 行 \rightarrow y i→行→y
j → 列 → x j \rightarrow 列 \rightarrow x j→列→x
因此,像素索引为 ( i , j ) (i, j) (i,j) 的点对应的坐标为 ( y , x ) (y, x) (y,x)。若该对应关系错误,可能导致非预期的变换结果(例如顺时针旋转操作实际执行后为逆时针旋转)。
数据准备
以下通过 OpenCV 编写简易交互程序,用于获取图像中指定像素的坐标:
import cv2
WIN_NAME = 'pick_points'
IMAGE_FILE = 'test.png'
def pick_points(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
print('x = %d, y = %d' % (x, y))
cv2.namedWindow(WIN_NAME, 0)
cv2.setMouseCallback(WIN_NAME, pick_points)
image = cv2.imread(IMAGE_FILE, cv2.IMREAD_UNCHANGED)
while True:
cv2.imshow(WIN_NAME, image)
key = cv2.waitKey(30)
if key == 27: # ESC
break
cv2.destroyAllWindows()
使用时需修改程序中图像文件的路径,路径中避免包含中文字符。运行程序后,左键点击图像即可通过 print 函数输出鼠标位置的坐标。
本示例原计划使用人脸图像,但为避免肖像权问题,改用大猩猩面部图像。该图像本地分辨率为 550 × 333(宽 × 高),若上传后分辨率变化,可通过上述程序重新拾取坐标。

坐标拾取顺序为:左眼、右眼、鼻尖、左嘴角、右嘴角(左右以观察者视角为准,无需考虑拍摄时的镜像变换)。拾取的原始图像坐标( ( u , v ) (u, v) (u,v))如下:
u 1 = 288 , v 1 = 115 u_1 = 288, v_1 = 115 u1=288,v1=115
u 2 = 334 , v 2 = 119 u_2 = 334, v_2 = 119 u2=334,v2=119
u 3 = 278 , v 3 = 160 u_3 = 278, v_3 = 160 u3=278,v3=160
u 4 = 250 , v 4 = 193 u_4 = 250, v_4 = 193 u4=250,v4=193
u 5 = 318 , v 5 = 192 u_5 = 318, v_5 = 192 u5=318,v5=192
人脸对齐需使用预定义的五点模板,本示例针对大猩猩面部构造了一个尺寸为 100 × 100 的五点模板,坐标( ( x , y ) (x, y) (x,y))如下:
x 1 = 31.3 , y 1 = 45.2 x_1 = 31.3, y_1 = 45.2 x1=31.3,y1=45.2
x 2 = 67.8 , y 2 = 45.2 x_2 = 67.8, y_2 = 45.2 x2=67.8,y2=45.2
x 3 = 49.5 , y 3 = 68.7 x_3 = 49.5, y_3 = 68.7 x3=49.5,y3=68.7
x 4 = 35.2 , y 4 = 84.8 x_4 = 35.2, y_4 = 84.8 x4=35.2,y4=84.8
x 5 = 62.6 , y 5 = 84.8 x_5 = 62.6, y_5 = 84.8 x5=62.6,y5=84.8
该模板为模拟数据,无实际标注依据。
求解仿射变换矩阵
前向映射
将 5 组对应点代入仿射变换通式,可得:
{
x
1
=
t
11
u
1
+
t
21
v
1
+
t
31
1
y
1
=
t
12
u
1
+
t
22
v
1
+
t
32
1
x
2
=
t
11
u
2
+
t
21
v
2
+
t
31
1
y
2
=
t
12
u
2
+
t
22
v
2
+
t
32
1
⋮
x
5
=
t
11
u
5
+
t
21
v
5
+
t
31
1
y
5
=
t
12
u
5
+
t
22
v
5
+
t
32
1
\begin{cases} x_1 = t_{11} u_1 + t_{21} v_1 + t_{31} 1 \\ y_1 = t_{12} u_1 + t_{22} v_1 + t_{32} 1 \\ x_2 = t_{11} u_2 + t_{21} v_2 + t_{31} 1 \\ y_2 = t_{12} u_2 + t_{22} v_2 + t_{32} 1 \\ \vdots \\ x_5 = t_{11} u_5 + t_{21} v_5 + t_{31} 1 \\ y_5 = t_{12} u_5 + t_{22} v_5 + t_{32} 1 \end{cases}
⎩
⎨
⎧x1=t11u1+t21v1+t311y1=t12u1+t22v1+t321x2=t11u2+t21v2+t311y2=t12u2+t22v2+t321⋮x5=t11u5+t21v5+t311y5=t12u5+t22v5+t321
式中,
u
,
v
,
x
,
y
u, v, x, y
u,v,x,y 为已知量,
t
i
j
t_{ij}
tij 为待求量。注意到
t
11
,
t
21
,
t
31
t_{11}, t_{21}, t_{31}
t11,t21,t31 仅与
x
x
x 相关,
t
12
,
t
22
,
t
32
t_{12}, t_{22}, t_{32}
t12,t22,t32 仅与
y
y
y 相关,因此可将上述方程组拆分为两组:
第一组(与
x
x
x 相关):
{
x
1
=
t
11
u
1
+
t
21
v
1
+
t
31
1
x
2
=
t
11
u
2
+
t
21
v
2
+
t
31
1
⋮
x
5
=
t
11
u
5
+
t
21
v
5
+
t
31
1
\begin{cases} x_1 = t_{11} u_1 + t_{21} v_1 + t_{31} 1 \\ x_2 = t_{11} u_2 + t_{21} v_2 + t_{31} 1 \\ \vdots \\ x_5 = t_{11} u_5 + t_{21} v_5 + t_{31} 1 \end{cases}
⎩
⎨
⎧x1=t11u1+t21v1+t311x2=t11u2+t21v2+t311⋮x5=t11u5+t21v5+t311
第二组(与
y
y
y 相关):
{
y
1
=
t
12
u
1
+
t
22
v
1
+
t
32
1
y
2
=
t
12
u
2
+
t
22
v
2
+
t
32
1
⋮
y
5
=
t
12
u
5
+
t
22
v
5
+
t
32
1
\begin{cases} y_1 = t_{12} u_1 + t_{22} v_1 + t_{32} 1 \\ y_2 = t_{12} u_2 + t_{22} v_2 + t_{32} 1 \\ \vdots \\ y_5 = t_{12} u_5 + t_{22} v_5 + t_{32} 1 \end{cases}
⎩
⎨
⎧y1=t12u1+t22v1+t321y2=t12u2+t22v2+t321⋮y5=t12u5+t22v5+t321
定义如下矩阵与向量:
T
1
=
[
t
11
,
t
21
,
t
31
]
T
,
T
2
=
[
t
12
,
t
22
,
t
32
]
T
X
=
[
x
1
,
x
2
,
…
,
x
5
]
T
,
Y
=
[
y
1
,
y
2
,
…
,
y
5
]
T
T_1 = [t_{11}, t_{21}, t_{31}]^T, \quad T_2 = [t_{12}, t_{22}, t_{32}]^T \\[1em] X = [x_1, x_2, \dots, x_5]^T, \quad Y = [y_1, y_2, \dots, y_5]^T
T1=[t11,t21,t31]T,T2=[t12,t22,t32]TX=[x1,x2,…,x5]T,Y=[y1,y2,…,y5]T
A
=
[
u
1
v
1
1
u
2
v
2
1
⋮
⋮
⋮
u
5
v
5
1
]
A = \begin{bmatrix} u_1 & v_1 & 1 \\ u_2 & v_2 & 1 \\ \vdots & \vdots & \vdots \\ u_5 & v_5 & 1 \end{bmatrix}
A=
u1u2⋮u5v1v2⋮v511⋮1
则两组方程组可简化为: A T 1 = X A T_1 = X AT1=X, A T 2 = Y A T_2 = Y AT2=Y。已知 A , X , Y A, X, Y A,X,Y,求解 T 1 , T 2 T_1, T_2 T1,T2 即可。该方程组为超定方程组(方程数多于未知量数),无精确解,需通过最小二乘法求解。
以
A
T
1
=
X
A T_1 = X
AT1=X 为例,最小二乘解的推导过程如下:
A
T
1
=
X
A
T
A
T
1
=
A
T
X
(
A
T
A
)
−
1
A
T
A
T
1
=
(
A
T
A
)
−
1
A
T
X
T
1
=
(
A
T
A
)
−
1
A
T
X
A T_1 = X \\ A^T A T_1 = A^T X \\ (A^T A)^{-1} A^T A T_1 = (A^T A)^{-1} A^T X \\ T_1 = (A^T A)^{-1} A^T X
AT1=XATAT1=ATX(ATA)−1ATAT1=(ATA)−1ATXT1=(ATA)−1ATX
推导说明:
- 等式两侧左乘 A T A^T AT,将系数矩阵转换为正定方阵;
- 等式两侧左乘 ( A T A ) − 1 (A^T A)^{-1} (ATA)−1,左侧系数矩阵变为单位阵,右侧即为 T 1 T_1 T1 的解。
同理可得: T 2 = ( A T A ) − 1 A T Y T_2 = (A^T A)^{-1} A^T Y T2=(ATA)−1ATY。
前向映射的定义为:从原始图像坐标 ( u , v ) (u, v) (u,v)(整数)出发,经矩阵变换得到变换后坐标 ( x , y ) (x, y) (x,y)(通常为浮点数)。该方法易于理解,但实际计算中极少使用,原因是变换后的浮点坐标需通过插值获取像素值,而前向映射的计算结果对插值操作不友好,后向映射则更适配插值流程。
后向映射
后向映射的定义为:从变换后图像坐标 ( x , y ) (x, y) (x,y)(整数)出发,经矩阵变换得到其在原始图像中的对应坐标 ( u , v ) (u, v) (u,v)(通常为浮点数)。
后向映射的推导流程与前向映射类似,仅需交换 ( x , y ) (x, y) (x,y) 与 ( u , v ) (u, v) (u,v) 的位置,具体如下:
将 5 组对应点代入仿射变换通式:
{
u
=
t
11
x
+
t
21
y
+
t
31
v
=
t
12
x
+
t
22
y
+
t
32
\begin{cases} u = t_{11} x + t_{21} y + t_{31} \\ v = t_{12} x + t_{22} y + t_{32} \end{cases}
{u=t11x+t21y+t31v=t12x+t22y+t32
展开可得:
{
u
1
=
t
11
x
1
+
t
21
y
1
+
t
31
1
u
2
=
t
11
x
2
+
t
21
y
2
+
t
31
1
⋮
u
5
=
t
11
x
5
+
t
21
y
5
+
t
31
1
{
v
1
=
t
12
x
1
+
t
22
y
1
+
t
32
1
v
2
=
t
12
x
2
+
t
22
y
2
+
t
32
1
⋮
v
5
=
t
12
x
5
+
t
22
y
5
+
t
32
1
\begin{cases} u_1 = t_{11} x_1 + t_{21} y_1 + t_{31} 1 \\ u_2 = t_{11} x_2 + t_{21} y_2 + t_{31} 1 \\ \vdots \\ u_5 = t_{11} x_5 + t_{21} y_5 + t_{31} 1 \end{cases} \\[1em] \begin{cases} v_1 = t_{12} x_1 + t_{22} y_1 + t_{32} 1 \\ v_2 = t_{12} x_2 + t_{22} y_2 + t_{32} 1 \\ \vdots \\ v_5 = t_{12} x_5 + t_{22} y_5 + t_{32} 1 \end{cases}
⎩
⎨
⎧u1=t11x1+t21y1+t311u2=t11x2+t21y2+t311⋮u5=t11x5+t21y5+t311⎩
⎨
⎧v1=t12x1+t22y1+t321v2=t12x2+t22y2+t321⋮v5=t12x5+t22y5+t321
定义如下矩阵与向量:
T
1
=
[
t
11
,
t
21
,
t
31
]
T
,
T
2
=
[
t
12
,
t
22
,
t
32
]
T
U
=
[
u
1
,
u
2
,
…
,
u
5
]
T
,
V
=
[
v
1
,
v
2
,
…
,
v
5
]
T
T_1 = [t_{11}, t_{21}, t_{31}]^T, \quad T_2 = [t_{12}, t_{22}, t_{32}]^T \\[1em] U = [u_1, u_2, \dots, u_5]^T, \quad V = [v_1, v_2, \dots, v_5]^T
T1=[t11,t21,t31]T,T2=[t12,t22,t32]TU=[u1,u2,…,u5]T,V=[v1,v2,…,v5]T
A
=
[
x
1
y
1
1
x
2
y
2
1
⋮
⋮
⋮
x
5
y
5
1
]
A = \begin{bmatrix} x_1 & y_1 & 1 \\ x_2 & y_2 & 1 \\ \vdots & \vdots & \vdots \\ x_5 & y_5 & 1 \end{bmatrix}
A=
x1x2⋮x5y1y2⋮y511⋮1
则方程组的最小二乘解为:
T
1
=
(
A
T
A
)
−
1
A
T
U
T
2
=
(
A
T
A
)
−
1
A
T
V
T_1 = (A^T A)^{-1} A^T U \\ T_2 = (A^T A)^{-1} A^T V
T1=(ATA)−1ATUT2=(ATA)−1ATV
定义
A
ˉ
=
(
A
T
A
)
−
1
A
T
\bar{A} = (A^T A)^{-1} A^T
Aˉ=(ATA)−1AT,预先计算
A
ˉ
\bar{A}
Aˉ 可减少重复运算,此时解可简化为:
T
1
=
A
ˉ
U
T
2
=
A
ˉ
V
T_1 = \bar{A} U \\ T_2 = \bar{A} V
T1=AˉUT2=AˉV
后向映射代码实现
需注意,本文重点为仿射变换原理介绍,坐标变换后需执行插值操作以生成变换后图像。工程中常用双线性插值,本文为简化实现,采用最邻近插值(插值函数为 nearest_sampler)。若需深入了解插值方法,可参考:图像插值:最邻近(nearest)与双线性(bilinear)
# -*- coding: utf-8 -*-
import cv2
import numpy as np
def nearest_sampler(image, coords):
"""
Nearest Neighbour sampler
Parameters
----------
image: ndarray
source image, whose shape is [height, width, channels]
coords: ndarray
coordinates to be interpolated, the length of last axis should be 2,
meaning 2D coordinate
Returns
-------
output: ndarray
the interpolated image, same shape as coords except the last axis
"""
height, width, channels = image.shape[0:3]
output_shape = list(coords.shape)
coords = np.reshape(coords, (-1, output_shape[-1]))
output_shape[-1] = channels
coords = np.round(coords).astype(np.int32)
idx = (coords[:, 0] >= 0) & (coords[:, 0] < width) & \
(coords[:, 1] >= 0) & (coords[:, 1] < height)
output = np.zeros((coords.shape[0], channels), dtype=np.uint8)
output[idx] = image[coords[idx, 1], coords[idx, 0], :]
output = np.reshape(output, output_shape)
return output
if __name__ == '__main__':
# feature points
uv = np.array([[288, 115],
[334, 119],
[278, 160],
[250, 193],
[318, 192]])
# model points
xy = np.array([[31.3, 45.2],
[67.8, 45.2],
[49.5, 68.7],
[35.2, 84.8],
[62.6, 84.8]])
# compute transform matrix
U = np.reshape(uv[:, 0], [uv.shape[0], 1])
V = np.reshape(uv[:, 1], [uv.shape[0], 1])
A = np.zeros((xy.shape[0], 3))
A[:, 0:2] = xy
A[:, 2] = 1
A_bar = np.linalg.inv(A.T @ A) @ A.T
T1 = A_bar @ U
T2 = A_bar @ V
T = np.concatenate((T1, T2), axis=1)
# coordinates mapping
height = 100
width = 100
coords = np.meshgrid(np.arange(0, width), np.arange(0, height))
# shape = [height, width, 2] after transpose
coords = np.array(coords).transpose([1, 2, 0])
ones = np.ones([height, width, 1])
# homogeneous coordinates
coords = np.concatenate((coords, ones), axis=2)
# transformed coordinates
coords = coords @ T
# sampler
image = cv2.imread('2.jpg')
img = nearest_sampler(image, coords)
cv2.imshow('affine', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
大猩猩面部对齐结果如下:

该结果存在变形,源于两类基础变换:
- 宽高方向的缩放尺度不一致;
- 剪切变换的引入。
实际人脸对齐场景中,通常需避免此类变形,要求宽高方向缩放尺度一致且无剪切变换。因此需对仿射变换施加约束,下文介绍该类特殊仿射变换矩阵的求解方法。
特殊仿射变换及变换矩阵求解方法
本节针对上述变形问题,定义如下约束条件:
- 宽高方向的缩放尺度相同;
- 不引入剪切变换。
此外,人脸对齐场景中通常不引入镜像变换,因此实际涉及的基础变换类型仅包括:
- 旋转;
- 尺度(宽高缩放因子相同);
- 平移。
以下直接推导后向映射的变换表达式:
[
u
v
]
=
[
x
y
]
[
s
0
0
s
]
[
cos
(
θ
)
sin
(
θ
)
−
sin
(
θ
)
cos
(
θ
)
]
+
[
t
u
t
v
]
\begin{bmatrix} u & v \end{bmatrix} = \begin{bmatrix} x & y \end{bmatrix} \begin{bmatrix} s & 0 \\ 0 & s \end{bmatrix} \begin{bmatrix} \cos(\theta) & \sin(\theta) \\ -\sin(\theta) & \cos(\theta) \end{bmatrix} + \begin{bmatrix} t_u & t_v \end{bmatrix}
[uv]=[xy][s00s][cos(θ)−sin(θ)sin(θ)cos(θ)]+[tutv]
合并后可得:
[
u
v
]
=
[
x
y
1
]
[
s
∗
cos
(
θ
)
s
∗
sin
(
θ
)
−
s
∗
sin
(
θ
)
s
∗
cos
(
θ
)
t
u
t
v
]
\begin{bmatrix} u & v \end{bmatrix} = \begin{bmatrix} x & y & 1 \end{bmatrix} \begin{bmatrix} s*\cos(\theta) & s*\sin(\theta) \\ -s*\sin(\theta) & s*\cos(\theta) \\ t_u & t_v \end{bmatrix}
[uv]=[xy1]
s∗cos(θ)−s∗sin(θ)tus∗sin(θ)s∗cos(θ)tv
定义变量:
a
=
s
∗
cos
(
θ
)
b
=
s
∗
sin
(
θ
)
c
=
t
u
d
=
t
v
a = s*\cos(\theta) \\ b = s*\sin(\theta) \\ c = t_u \\ d = t_v
a=s∗cos(θ)b=s∗sin(θ)c=tud=tv
则变换表达式简化为:
[
u
v
]
=
[
x
y
1
]
[
a
b
−
b
a
c
d
]
\begin{bmatrix} u & v \end{bmatrix} = \begin{bmatrix} x & y & 1 \end{bmatrix} \begin{bmatrix} a & b \\ -b & a \\ c & d \end{bmatrix}
[uv]=[xy1]
a−bcbad
变换矩阵求解
将 5 组对应点代入上述表达式(仅推导后向映射):
{
u
1
=
a
∗
x
1
−
b
∗
y
1
+
c
∗
1
+
d
∗
0
u
2
=
a
∗
x
2
−
b
∗
y
2
+
c
∗
1
+
d
∗
0
⋮
u
5
=
a
∗
x
5
−
b
∗
y
5
+
c
∗
1
+
d
∗
0
v
1
=
a
∗
y
1
+
b
∗
x
1
+
c
∗
0
+
d
∗
1
v
2
=
a
∗
y
2
+
b
∗
x
2
+
c
∗
0
+
d
∗
1
⋮
v
5
=
a
∗
y
5
+
b
∗
x
5
+
c
∗
0
+
d
∗
1
\begin{cases} u_1 = a*x_1 - b*y_1 + c*1 + d*0 \\ u_2 = a*x_2 - b*y_2 + c*1 + d*0 \\ \vdots \\ u_5 = a*x_5 - b*y_5 + c*1 + d*0 \\ v_1 = a*y_1 + b*x_1 + c*0 + d*1 \\ v_2 = a*y_2 + b*x_2 + c*0 + d*1 \\ \vdots \\ v_5 = a*y_5 + b*x_5 + c*0 + d*1 \end{cases}
⎩
⎨
⎧u1=a∗x1−b∗y1+c∗1+d∗0u2=a∗x2−b∗y2+c∗1+d∗0⋮u5=a∗x5−b∗y5+c∗1+d∗0v1=a∗y1+b∗x1+c∗0+d∗1v2=a∗y2+b∗x2+c∗0+d∗1⋮v5=a∗y5+b∗x5+c∗0+d∗1
由于变换矩阵的第一列与第二列存在变量耦合(共享 a , b a, b a,b),无法拆分方程组分别求解,需通过一次最小二乘运算求解 4 个参数 a , b , c , d a, b, c, d a,b,c,d。
定义如下矩阵与向量:
A
=
[
x
1
−
y
1
1
0
x
2
−
y
2
1
0
⋮
⋮
⋮
⋮
x
5
−
y
5
1
0
y
1
x
1
0
1
y
2
x
2
0
1
⋮
⋮
⋮
⋮
y
5
x
5
0
1
]
A = \begin{bmatrix} x_1 & -y_1 & 1 & 0 \\ x_2 & -y_2 & 1 & 0 \\ \vdots & \vdots & \vdots & \vdots \\ x_5 & -y_5 & 1 & 0 \\ y_1 & x_1 & 0 & 1 \\ y_2 & x_2 & 0 & 1 \\ \vdots & \vdots & \vdots & \vdots \\ y_5 & x_5 & 0 & 1 \end{bmatrix}
A=
x1x2⋮x5y1y2⋮y5−y1−y2⋮−y5x1x2⋮x511⋮100⋮000⋮011⋮1
B
=
[
u
1
,
u
2
,
…
,
u
5
,
v
1
,
v
2
,
…
,
v
5
]
T
B = [u_1, u_2, \dots, u_5, v_1, v_2, \dots, v_5]^T
B=[u1,u2,…,u5,v1,v2,…,v5]T
T
ˉ
=
[
a
,
b
,
c
,
d
]
T
\bar{T} = [a, b, c, d]^T
Tˉ=[a,b,c,d]T
则最小二乘解为:
T
ˉ
=
(
A
T
A
)
−
1
A
T
B
\bar{T} = (A^T A)^{-1} A^T B
Tˉ=(ATA)−1ATB
求得 T ˉ \bar{T} Tˉ 后,按对应关系重组即可得到变换矩阵。以下为代码实现(仅变换矩阵求解部分与前文不同,其余代码一致,仍使用大猩猩面部数据):
# -*- coding: utf-8 -*-
import cv2
import numpy as np
def nearest_sampler(image, coords):
"""
Nearest Neighbour sampler
Parameters
----------
image: ndarray
source image, whose shape is [height, width, channels]
coords: ndarray
coordinates to be interpolated, the length of last axis should be 2,
meaning 2D coordinate
Returns
-------
output: ndarray
the interpolated image, same shape as coords except the last axis
"""
height, width, channels = image.shape[0:3]
output_shape = list(coords.shape)
coords = np.reshape(coords, (-1, output_shape[-1]))
output_shape[-1] = channels
coords = np.round(coords).astype(np.int32)
idx = (coords[:, 0] >= 0) & (coords[:, 0] < width) & \
(coords[:, 1] >= 0) & (coords[:, 1] < height)
output = np.zeros((coords.shape[0], channels), dtype=np.uint8)
output[idx] = image[coords[idx, 1], coords[idx, 0], :]
output = np.reshape(output, output_shape)
return output
if __name__ == '__main__':
# feature points
uv = np.array([[288, 115],
[334, 119],
[278, 160],
[250, 193],
[318, 192]])
# model points
xy = np.array([[31.3, 45.2],
[67.8, 45.2],
[49.5, 68.7],
[35.2, 84.8],
[62.6, 84.8]])
# compute transform matrix
num = xy.shape[0]
A = np.zeros((2 * num, 4))
A[0:num, 0] = xy[:, 0]
A[0:num, 1] = -xy[:, 1]
A[0:num, 2] = 1
A[num:2 * num, 0] = xy[:, 1]
A[num:2 * num, 1] = xy[:, 0]
A[num:2 * num, 3] = 1
B = np.reshape(uv.T, [2 * num, 1])
T_bar = np.linalg.inv(A.T @ A) @ A.T @ B
T = np.zeros((3, 2))
T[0, 0] = T_bar[0]
T[0, 1] = T_bar[1]
T[1, 0] = -T_bar[1]
T[1, 1] = T_bar[0]
T[2, 0] = T_bar[2]
T[2, 1] = T_bar[3]
# coordinates mapping
height = 100
width = 100
coords = np.meshgrid(np.arange(0, width), np.arange(0, height))
# shape = [height, width, 2] after transpose
coords = np.array(coords).transpose([1, 2, 0])
ones = np.ones([height, width, 1])
# homogeneous coordinates
coords = np.concatenate((coords, ones), axis=2)
# transformed coordinates
coords = coords @ T
# sampler
image = cv2.imread('2.jpg')
img = nearest_sampler(image, coords)
cv2.imshow('affine', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
约束后的对齐结果如下:

为便于对比,附上无约束的变形结果:

此外,附上手动旋转并裁剪原始图像的结果(裁剪为手动操作,位置与程序结果存在差异,仅用于对比两类仿射变换的变形效果):
变形的主要原因是大猩猩面部呈侧视角,若为正视角,即使使用无约束仿射变换,变形程度也会显著降低。
重要注意事项:前向映射与后向映射矩阵不互逆
部分开发者为贴合教科书的前向映射理论,先求解前向映射矩阵,再通过求逆得到后向映射矩阵,该方法存在错误——前向与后向映射矩阵通常不满足互逆关系。仅当求解的线性方程组为正定(仅使用 3 组线性无关的特征点)时,互逆关系才成立,而该场景在实际应用中并不常见。
以下通过代码验证该结论(需将 3×2 变换矩阵补充 [ 0 0 1 ] T \begin{bmatrix} 0 & 0 & 1 \end{bmatrix}^T [001]T 扩展为 3×3 矩阵,以验证矩阵逆):
# -*- coding: utf-8 -*-
import numpy as np
# feature points
uv = np.array([[288, 115],
[334, 119],
[278, 160],
[250, 193],
[318, 192]])
# model points
xy = np.array([[31.3, 45.2],
[67.8, 45.2],
[49.5, 68.7],
[35.2, 84.8],
[62.6, 84.8]])
# compute backward transform matrix
U = np.reshape(uv[:, 0], [uv.shape[0], 1])
V = np.reshape(uv[:, 1], [uv.shape[0], 1])
A = np.zeros((xy.shape[0], 3))
A[:, 0:2] = xy
A[:, 2] = 1
A_bar = np.linalg.inv(A.T @ A) @ A.T
T1 = A_bar @ U
T2 = A_bar @ V
T = np.concatenate((T1, T2), axis=1)
T_backward = np.concatenate((T, np.array([[0], [0], [1]])), axis=1)
# compute forward transform matrix
X = np.reshape(xy[:, 0], [xy.shape[0], 1])
Y = np.reshape(xy[:, 1], [xy.shape[0], 1])
A = np.zeros((xy.shape[0], 3))
A[:, 0:2] = uv
A[:, 2] = 1
A_bar = np.linalg.inv(A.T @ A) @ A.T
T1 = A_bar @ X
T2 = A_bar @ Y
T_forward = np.concatenate((T1, T2, np.array([[0], [0], [1]])), axis=1)
# verification
T_forward_inv = np.linalg.inv(T_forward)
T_mul = T_forward @ T_backward
计算得到的关键矩阵如下:
T
f
o
r
w
a
r
d
=
[
0.488518
−
0.0123897
0
0.177793
0.51996
0
−
121.849
−
11.6322
1
]
T
b
a
c
k
w
a
r
d
=
[
1.69603
0.0564699
0
−
0.68687
1.90407
0
255.175
27.8433
1
]
T
f
o
r
w
a
r
d
_
i
n
v
=
[
2.02941
0.048357
0
−
0.69393
1.90669
0
239.21
28.0712
1
]
T
m
u
l
=
[
0.837049
0.00399568
0
−
0.0556026
1.00008
0
56.5053
−
1.18607
1
]
T_{forward} = \begin{bmatrix} 0.488518 & -0.0123897 & 0 \\ 0.177793 & 0.51996 & 0 \\ -121.849 & -11.6322 & 1 \end{bmatrix} \\[1em] T_{backward} = \begin{bmatrix} 1.69603 & 0.0564699 & 0 \\ -0.68687 & 1.90407 & 0 \\ 255.175 & 27.8433 & 1 \end{bmatrix} \\[1em] T_{forward\_inv} = \begin{bmatrix} 2.02941 & 0.048357 & 0 \\ -0.69393 & 1.90669 & 0 \\ 239.21 & 28.0712 & 1 \end{bmatrix} \\[1em] T_{mul} = \begin{bmatrix} 0.837049 & 0.00399568 & 0 \\ -0.0556026 & 1.00008 & 0 \\ 56.5053 & -1.18607 & 1 \end{bmatrix}
Tforward=
0.4885180.177793−121.849−0.01238970.51996−11.6322001
Tbackward=
1.69603−0.68687255.1750.05646991.9040727.8433001
Tforward_inv=
2.02941−0.69393239.210.0483571.9066928.0712001
Tmul=
0.837049−0.055602656.50530.003995681.00008−1.18607001
可见, T f o r w a r d _ i n v T_{forward\_inv} Tforward_inv 与 T b a c k w a r d T_{backward} Tbackward 存在明显差异,且 T f o r w a r d T_{forward} Tforward 与 T b a c k w a r d T_{backward} Tbackward 的乘积 T m u l T_{mul} Tmul 并非单位矩阵,因此二者不满足互逆关系。
- 仿射变换 | 原理、矩阵构造(篇 1)-优快云博客
https://blog.youkuaiyun.com/u013669912/article/details/155749696 - 仿射变换 | 原理、矩阵构造(篇 3)-优快云博客
https://blog.youkuaiyun.com/u013669912/article/details/155774996
via:
- 仿射变换(Affine Transformation)原理及应用-优快云博客
https://blog.youkuaiyun.com/u011681952/article/details/98942207 - 图像坐标空间变换:仿射变换(Affine Transformation)_像空间坐标系与像空间辅助坐标系的转换代码-优快云博客
https://blog.youkuaiyun.com/bby1987/article/details/105695509

















 3035
3035

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









