







!!!实现环境:pcl1.8.0+vs2015+win10
大致过程:
1、利用PCA主元分析法获得点云的三个主方向,获取质心,计算协方差,获得协方差矩阵,求取协方差矩阵的特征值和特长向量,特征向量即为主方向。
-
Eigen::Vector4f pcaCentroid; -
pcl::compute3DCentroid(*cloud, pcaCentroid); -
Eigen::Matrix3f covariance; -
pcl::computeCovarianceMatrixNormalized(*cloud, pcaCentroid, covariance); -
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> eigen_solver(covariance, Eigen::ComputeEigenvectors); -
Eigen::Matrix3f eigenVectorsPCA = eigen_solver.eigenvectors(); -
Eigen::Vector3f eigenValuesPCA = eigen_solver.eigenvalues(); -
eigenVectorsPCA.col(2) = eigenVectorsPCA.col(0).cross(eigenVectorsPCA.col(1)); //校正主方向间垂直 -
eigenVectorsPCA.col(0) = eigenVectorsPCA.col(1).cross(eigenVectorsPCA.col(2)); -
eigenVectorsPCA.col(1) = eigenVectorsPCA.col(2).cross(eigenVectorsPCA.col(0));
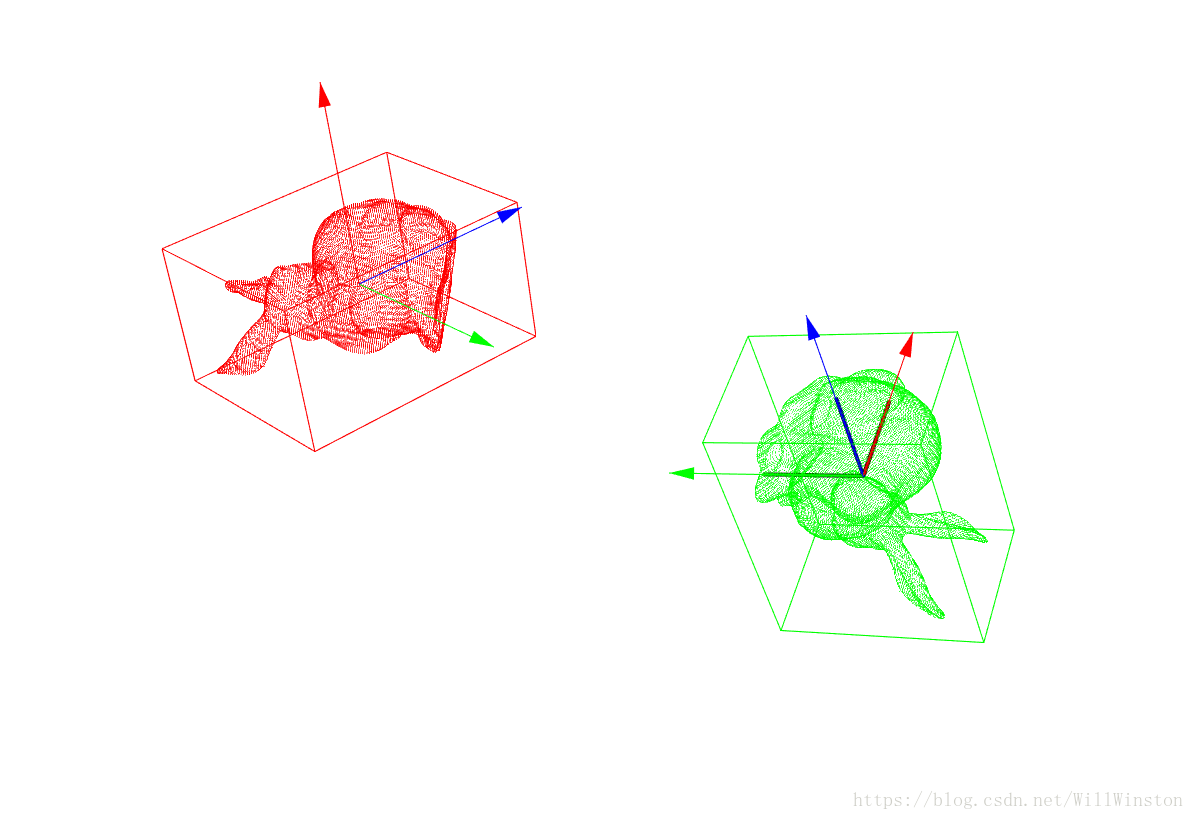
2、利用1中获得的主方向和质心,将输入点云转换至原点,且主方向与坐标系方向重回,建立变换到原点的点云的包围盒。
3、给输入点云设置主方向和包围盒,通过输入点云到原点点云变换的逆变换实现。
4、完整代码:
-
#include <vtkAutoInit.h> -
VTK_MODULE_INIT(vtkRenderingOpenGL); -
VTK_MODULE_INIT(vtkInteractionStyle); -
VTK_MODULE_INIT(vtkRenderingFreeType); -
#include <iostream> -
#include <string> -
#include <pcl/io/pcd_io.h> -
#include <pcl/point_cloud.h> -
#include <pcl/point_types.h> -
#include <Eigen/Core> -
#include <pcl/common/transforms.h> -
#include <pcl/common/common.h> -
#include <pcl/visualization/pcl_visualizer.h> -
using namespace std; -
typedef pcl::PointXYZ PointType; -
int main(int argc, char **argv) -
{ -
pcl::PointCloud<PointType>::Ptr cloud(new pcl::PointCloud<PointType>()); -
std::cout << "请输入需要显示的点云文件名:"; -
std::string fileName("rabbit"); -
getline(cin, fileName); -
fileName += ".pcd"; -
//std::string fileName(argv[1]); -
pcl::io::loadPCDFile(fileName, *cloud); -
Eigen::Vector4f pcaCentroid; -
pcl::compute3DCentroid(*cloud, pcaCentroid); -
Eigen::Matrix3f covariance; -
pcl::computeCovarianceMatrixNormalized(*cloud, pcaCentroid, covariance); -
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> eigen_solver(covariance, Eigen::ComputeEigenvectors); -
Eigen::Matrix3f eigenVectorsPCA = eigen_solver.eigenvectors(); -
Eigen::Vector3f eigenValuesPCA = eigen_solver.eigenvalues(); -
eigenVectorsPCA.col(2) = eigenVectorsPCA.col(0).cross(eigenVectorsPCA.col(1)); //校正主方向间垂直 -
eigenVectorsPCA.col(0) = eigenVectorsPCA.col(1).cross(eigenVectorsPCA.col(2)); -
eigenVectorsPCA.col(1) = eigenVectorsPCA.col(2).cross(eigenVectorsPCA.col(0)); -
std::cout << "特征值va(3x1):\n" << eigenValuesPCA << std::endl; -
std::cout << "特征向量ve(3x3):\n" << eigenVectorsPCA << std::endl; -
std::cout << "质心点(4x1):\n" << pcaCentroid << std::endl; -
/* -
// 另一种计算点云协方差矩阵特征值和特征向量的方式:通过pcl中的pca接口,如下,这种情况得到的特征向量相似特征向量 -
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudPCAprojection (new pcl::PointCloud<pcl::PointXYZ>); -
pcl::PCA<pcl::PointXYZ> pca; -
pca.setInputCloud(cloudSegmented); -
pca.project(*cloudSegmented, *cloudPCAprojection); -
std::cerr << std::endl << "EigenVectors: " << pca.getEigenVectors() << std::endl;//计算特征向量 -
std::cerr << std::endl << "EigenValues: " << pca.getEigenValues() << std::endl;//计算特征值 -
*/ -
Eigen::Matrix4f tm = Eigen::Matrix4f::Identity(); -
Eigen::Matrix4f tm_inv = Eigen::Matrix4f::Identity(); -
tm.block<3, 3>(0, 0) = eigenVectorsPCA.transpose(); //R. -
tm.block<3, 1>(0, 3) = -1.0f * (eigenVectorsPCA.transpose()) *(pcaCentroid.head<3>());// -R*t -
tm_inv = tm.inverse(); -
std::cout << "变换矩阵tm(4x4):\n" << tm << std::endl; -
std::cout << "逆变矩阵tm'(4x4):\n" << tm_inv << std::endl; -
pcl::PointCloud<PointType>::Ptr transformedCloud(new pcl::PointCloud<PointType>); -
pcl::transformPointCloud(*cloud, *transformedCloud, tm); -
PointType min_p1, max_p1; -
Eigen::Vector3f c1, c; -
pcl::getMinMax3D(*transformedCloud, min_p1, max_p1); -
c1 = 0.5f*(min_p1.getVector3fMap() + max_p1.getVector3fMap()); -
std::cout << "型心c1(3x1):\n" << c1 << std::endl; -
Eigen::Affine3f tm_inv_aff(tm_inv); -
pcl::transformPoint(c1, c, tm_inv_aff); -
Eigen::Vector3f whd, whd1; -
whd1 = max_p1.getVector3fMap() - min_p1.getVector3fMap(); -
whd = whd1; -
float sc1 = (whd1(0) + whd1(1) + whd1(2)) / 3; //点云平均尺度,用于设置主方向箭头大小 -
std::cout << "width1=" << whd1(0) << endl; -
std::cout << "heght1=" << whd1(1) << endl; -
std::cout << "depth1=" << whd1(2) << endl; -
std::cout << "scale1=" << sc1 << endl; -
const Eigen::Quaternionf bboxQ1(Eigen::Quaternionf::Identity()); -
const Eigen::Vector3f bboxT1(c1); -
const Eigen::Quaternionf bboxQ(tm_inv.block<3, 3>(0, 0)); -
const Eigen::Vector3f bboxT(c); -
//变换到原点的点云主方向 -
PointType op; -
op.x = 0.0; -
op.y = 0.0; -
op.z = 0.0; -
Eigen::Vector3f px, py, pz; -
Eigen::Affine3f tm_aff(tm); -
pcl::transformVector(eigenVectorsPCA.col(0), px, tm_aff); -
pcl::transformVector(eigenVectorsPCA.col(1), py, tm_aff); -
pcl::transformVector(eigenVectorsPCA.col(2), pz, tm_aff); -
PointType pcaX; -
pcaX.x = sc1 * px(0); -
pcaX.y = sc1 * px(1); -
pcaX.z = sc1 * px(2); -
PointType pcaY; -
pcaY.x = sc1 * py(0); -
pcaY.y = sc1 * py(1); -
pcaY.z = sc1 * py(2); -
PointType pcaZ; -
pcaZ.x = sc1 * pz(0); -
pcaZ.y = sc1 * pz(1); -
pcaZ.z = sc1 * pz(2); -
//初始点云的主方向 -
PointType cp; -
cp.x = pcaCentroid(0); -
cp.y = pcaCentroid(1); -
cp.z = pcaCentroid(2); -
PointType pcX; -
pcX.x = sc1 * eigenVectorsPCA(0, 0) + cp.x; -
pcX.y = sc1 * eigenVectorsPCA(1, 0) + cp.y; -
pcX.z = sc1 * eigenVectorsPCA(2, 0) + cp.z; -
PointType pcY; -
pcY.x = sc1 * eigenVectorsPCA(0, 1) + cp.x; -
pcY.y = sc1 * eigenVectorsPCA(1, 1) + cp.y; -
pcY.z = sc1 * eigenVectorsPCA(2, 1) + cp.z; -
PointType pcZ; -
pcZ.x = sc1 * eigenVectorsPCA(0, 2) + cp.x; -
pcZ.y = sc1 * eigenVectorsPCA(1, 2) + cp.y; -
pcZ.z = sc1 * eigenVectorsPCA(2, 2) + cp.z; -
//visualization -
pcl::visualization::PCLVisualizer viewer; -
pcl::visualization::PointCloudColorHandlerCustom<PointType> tc_handler(transformedCloud, 0, 255, 0); //转换到原点的点云相关 -
viewer.addPointCloud(transformedCloud, tc_handler, "transformCloud"); -
viewer.addCube(bboxT1, bboxQ1, whd1(0), whd1(1), whd1(2), "bbox1"); -
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "bbox1"); -
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0.0, 1.0, 0.0, "bbox1"); -
viewer.addArrow(pcaX, op, 1.0, 0.0, 0.0, false, "arrow_X"); -
viewer.addArrow(pcaY, op, 0.0, 1.0, 0.0, false, "arrow_Y"); -
viewer.addArrow(pcaZ, op, 0.0, 0.0, 1.0, false, "arrow_Z"); -
pcl::visualization::PointCloudColorHandlerCustom<PointType> color_handler(cloud, 255, 0, 0); //输入的初始点云相关 -
viewer.addPointCloud(cloud, color_handler, "cloud"); -
viewer.addCube(bboxT, bboxQ, whd(0), whd(1), whd(2), "bbox"); -
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "bbox"); -
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "bbox"); -
viewer.addArrow(pcX, cp, 1.0, 0.0, 0.0, false, "arrow_x"); -
viewer.addArrow(pcY, cp, 0.0, 1.0, 0.0, false, "arrow_y"); -
viewer.addArrow(pcZ, cp, 0.0, 0.0, 1.0, false, "arrow_z"); -
viewer.addCoordinateSystem(0.5f*sc1); -
viewer.setBackgroundColor(1.0, 1.0, 1.0); -
while (!viewer.wasStopped()) -
{ -
viewer.spinOnce(100); -
} -
return 0; -
}
注:如有问题请批评指正。
参考资料:
[1] Finding oriented bounding box of a cloud
[2] 计算点云的最小BBOX
全文地址请点击:https://blog.youkuaiyun.com/WillWinston/article/details/80196895?utm_source=copy

















 2375
2375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









