







 本文整理了语义SLAM领域的经典工作与最新进展,包括动态场景处理、机器学习方法的应用及其挑战。总结了现有技术的优点与局限性,并探讨了补图技术对重建的影响。
本文整理了语义SLAM领域的经典工作与最新进展,包括动态场景处理、机器学习方法的应用及其挑战。总结了现有技术的优点与局限性,并探讨了补图技术对重建的影响。
-
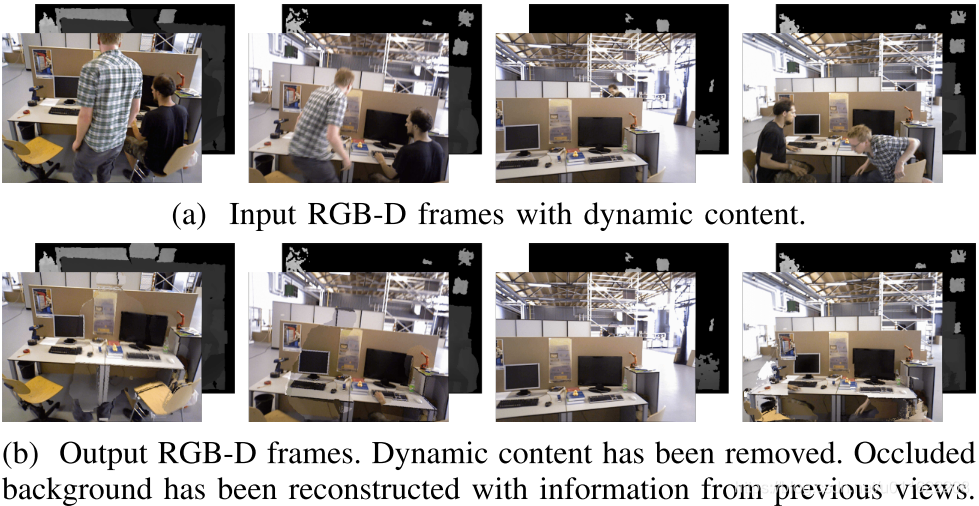
Dynaslam: Tracking, mapping, and inpainting in dynamic scenes (2018 IEEE RAL)
总结
在动态场景中机器学习方法去除运动部分确实有用;
目前的方法计算时间过长(MaskRCNN就需要195ms来处理一帧,Tesla M40);
补图可以提高重建能力,但对位姿精度没有帮助。

















 4366
4366
评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包








