







文章目录
- 下发预览请求
- 1,SprdCamera3HWI:channel->request
- 2,SprdCamera3RegularChannel::request
- 3,SprdCamera3Stream::buffDoneQ
- 4,SprdCamera3OEMIf::queueBuffer
- 5,SprdCamera3Stream::getQBufInfoForHandle
- 6,mHalOem->ops->queue_buffer
- 7,SprdOEMCamera::queue_buffer
- 8,cmr_oem::local_queue_buffer
- 9,cmr_preview::cmr_preview_set_preview_buffer
- 10,cmr_preview::prev_set_preview_buffer
- 处理预览帧数据
- 1,cmr_grab::cmr_grab_thread_proc
- 2,cmr_oem::camera_grab_evt_cb
- 3,cmr_oem::camera_send_channel_data
- 4,cmr_preview::cmr_preview_receive_data
- 5,cmr_preview::prev_preview_frame_handle
- 6,cmr_preview::prev_construct_frame
- 7,cmr_preview::prev_pop_preview_buffer
- 8,回调 步骤6 中填充的数据
- 9,cmr_oem处理回调
- 10,SprdCamera3OEMIf::camera_cb
- 11,SprdCamera3OEMIf::receivePreviewFrame
- 12,SprdCamera3OEMIf::PreviewFramePreviewStream
- 13,SprdCamera3RegularChannel::channelCbRoutine (buffDoneDQ)
- log 跟踪
我们在前面的文章中主要是单独介绍hal和oem下的某些关键c/cpp文件的内容,比较分散。因为整个预览流程涉及的内容太多,我们不好在一篇文章中讲清楚,只能先把单个的知识点一一说明,然后才能将整个预览流程串起来。
注:大家阅读本篇前,请先将我之前介绍的 Hal3_2v6 和 OEM 的内容过下。
下发预览请求
我在前一篇文章中介绍了SprdCamera3HWI.cpp ,它的三个关键流程中有一个 processCaptureRequest,即发送预览请求的,我们就从这里开始。
1,SprdCamera3HWI:channel->request
for (i = 0; i < request->num_output_buffers; i++) {
const camera3_stream_buffer_t &output = request->output_buffers[i];
camera3_stream_t *stream = output.stream;
SprdCamera3Channel *channel = (SprdCamera3Channel *)stream->priv;
ret = channel->request(stream, output.buffer, frameNumber);
}
2,SprdCamera3RegularChannel::request
我们知道,channel有两类:预览和拍照。分别对应 SprdCamera3RegularChannel 和 SprdCamera3PicChannel (还有一个负责处理metadata的 SprdCamera3MetadataChannel)。
我们本篇分析预览的流程,那channel走的就是 SprdCamera3RegularChannel,其request的内容不多,我们就全贴出来了。
int SprdCamera3RegularChannel::request(camera3_stream_t *stream,
buffer_handle_t *buffer,
uint32_t frameNumber) {
HAL_LOGD("SprdCamera3RegularChannel request frameNumber:%d", frameNumber);
int ret = NO_ERROR;
int i;
char multicameramode[PROPERTY_VALUE_MAX];
for (i = 0; i < CHANNEL_MAX_STREAM_NUM; i++) {
if (mCamera3Stream[i]) {
camera3_stream_t *new_stream;
mCamera3Stream[i]->getStreamInfo(&new_stream);
if (new_stream == stream) {
ret = mCamera3Stream[i]->buffDoneQ(frameNumber, buffer);
if (ret != NO_ERROR) {
return ret;
}
if (i == 0) {
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_PREVIEW);
} else if (i == (CAMERA_STREAM_TYPE_VIDEO -
REGULAR_STREAM_TYPE_BASE)) {
if (mOEMIf->isVideoCopyFromPreview()) {
HAL_LOGD("video stream copy preview stream");
} else {
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_VIDEO);
}
} else if (i == (CAMERA_STREAM_TYPE_CALLBACK -
REGULAR_STREAM_TYPE_BASE))
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_CALLBACK);
else if (i ==
(CAMERA_STREAM_TYPE_YUV2 - REGULAR_STREAM_TYPE_BASE))
mOEMIf->queueBuffer(buffer, CAMERA_STREAM_TYPE_YUV2);
break;
}
}
}
return ret;
}
channel的request流程主要分为如下两个步骤:
- SprdCamera3Stream::buffDoneQ
- SprdCamera3OEMIf::queueBuffer
3,SprdCamera3Stream::buffDoneQ
cam3Stream的buffDoneQ主要是调用 SprdCamera3GrallocMemory 的map,将入参 buffer_handle_t *buffer_handle 传入GraphicBufferMapper 的 lock 中,获取虚拟地址 addr_vir。
//SprdCamera3Stream
int SprdCamera3Stream::buffDoneQ(uint32_t frameNumber,buffer_handle_t *buffer) {}
hal_buff_list_t *buff_hal = new hal_buff_list_t;
hal_mem_info_t *buf_mem_info = &(buff_hal->mem_info);
mMemory->map(buffer, buf_mem_info);
//SprdCamera3GrallocMemory
int SprdCamera3GrallocMemory::map(buffer_handle_t *buffer_handle,hal_mem_info_t *mem_info){}
GraphicBufferMapper &mapper = GraphicBufferMapper::get();
ret = mapper.lock((const native_handle_t *)*buffer_handle, usage,bounds, &vaddr);
mem_info->addr_vir = vaddr;
通过SprdCamera3GrallocMemory 的 map之后,拿到了 addr_vir 保存在 cam3Stream的buff_hal下的hal_mem_info_t 中,然后
mBufferList.add(buff_hal);
我们看到cam3Stream中有明显对称的函数:
- buffDoneQ
- buffDoneQ2
- buffDoneDQ
- buffFirstDoneDQ
他们分别调用SprdCamera3GrallocMemory 中的map 与 unmap,即 GraphicBufferMapper 的 lock与 unlock。
| SprdCamera3Stream | SprdCamera3GrallocMemory | SprdCamera3Stream |
|---|---|---|
| buffDoneQ、buffDoneQ2 | map | mBufferList.add |
| buffDoneDQ、buffDoneDQ | unmap | mBufferList.erase |
SprdCamera3Stream中的mBufferList在map时向集合中add、unmap时向集合中erase的数据。
总之,SprdCamera3Stream::buffDoneQ 的主要目的是获取入参 buffer_handle_t *buffer 的 addr_vir 。
4,SprdCamera3OEMIf::queueBuffer
SprdCamera3OEMIf 的 queueBuffer中关于preivew的这条case 代码不多,我们也直接贴出来。也分两步
- stream->getQBufInfoForHandle
- mHalOem->ops->queue_buffer
case CAMERA_STREAM_TYPE_PREVIEW:
channel = reinterpret_cast<SprdCamera3RegularChannel *>(mRegularChan);
if (channel == NULL) {
ret = -1;
HAL_LOGE("mRegularChan is null");
goto exit;
}
ret = channel->getStream(CAMERA_STREAM_TYPE_PREVIEW, &stream);
if (ret || stream == NULL) {
HAL_LOGE("getStream failed");
goto exit;
}
ret = stream->getQBufInfoForHandle(buff_handle, &buffer);
if (ret || buffer.addr_vir == NULL) {
HAL_LOGE("getQBufForHandle failed");
goto exit;
}
mHalOem->ops->queue_buffer(mCameraHandle, buffer,
SPRD_CAM_STREAM_PREVIEW);
break;
5,SprdCamera3Stream::getQBufInfoForHandle
我们在步骤3中介绍了SprdCamera3Stream管理了一个集合 mBufferList,这里就是在该集合中根据入参 buffer_handle_t *buff来获取信息,并将信息封装到 cam_buffer_info_t 对象中,其中最重要的就是 addr_vir。
int SprdCamera3Stream::getQBufInfoForHandle(buffer_handle_t *buff,
cam_buffer_info_t *bufInfo) {
Mutex::Autolock l(mLock);
int ret = NO_ERROR;
Vector<hal_buff_list_t *>::iterator iter;
for (iter = mBufferList.begin(); iter != mBufferList.end(); iter++) {
if ((*iter) && (*iter)->buffer_handle == buff) {
bufInfo->fd = (*iter)->mem_info.fd;
bufInfo->size = (*iter)->mem_info.size;
bufInfo->addr_phy = (*iter)->mem_info.addr_phy;
bufInfo->addr_vir = (*iter)->mem_info.addr_vir;
bufInfo->width = (*iter)->mem_info.width;
bufInfo->height = (*iter)->mem_info.height;
bufInfo->format = (*iter)->mem_info.format;
bufInfo->frame_number = (*iter)->frame_number;
return ret;
}
}
return BAD_VALUE;
}
6,mHalOem->ops->queue_buffer
我们在SprdCamera3OEMIf中看到很多 mHalOem->ops 调用形式。我们来看下 mHalOem 的实例化,在SprdCamera3OEMIf的构造函数中:
if (!mHalOem) {
oem_module_t *omi;
mHalOem = (oem_module_t *)malloc(sizeof(oem_module_t));
if (NULL == mHalOem) {
HAL_LOGE("mHalOem is NULL");
} else {
memset(mHalOem, 0, sizeof(*mHalOem));
mHalOem->dso = dlopen(OEM_LIBRARY_PATH, RTLD_NOW);
if (NULL == mHalOem->dso) {
char const *err_str = dlerror();
HAL_LOGE("dlopen error%s ", err_str ? err_str : "unknown");
}
const char *sym = OEM_MODULE_INFO_SYM_AS_STR;//OMI
omi = (oem_module_t *)dlsym(mHalOem->dso, sym);
if (omi) {
mHalOem->ops = omi->ops;
}
HAL_LOGI("loaded libcamoem.so mHalOem->dso = %p", mHalOem->dso);
}
}
#define OEM_LIBRARY_PATH "libcamoem.so"
我们看到是open了一个 OEM_LIBRARY_PATH,即oem的库。在SprdOEMCamera中找到OEM_MODULE_INFO_SYM 的定义:
struct oem_module OEM_MODULE_INFO_SYM = {
.tag = 0, .ops = &oem_module_ops, .dso = NULL};
其中 ops = &oem_module_ops,即SprdOEMCamera中定义的所有操作:
static oem_ops_t oem_module_ops = {
camera_init, camera_deinit, camera_release_frame, camera_set_param,
camera_start_preview, camera_stop_preview, camera_start_autofocus,
camera_cancel_autofocus, camera_cancel_takepicture,
// camera_safe_scale_th,
NULL, camera_take_picture, camera_get_sn_trim, camera_set_mem_func,
camera_get_redisplay_data, camera_is_change_size,
NULL, camera_get_preview_rect,
camera_get_zsl_capability, camera_get_sensor_info_for_raw,
camera_get_sensor_trim, camera_get_sensor_trim2,
camera_get_preview_rot_angle, camera_fd_enable, camera_flip_enable,
camera_fd_start, camera_is_need_stop_preview, camera_takepicture_process,
camera_get_size_align_page, camera_fast_ctrl, camera_start_preflash,
camera_get_viewangle, camera_get_sensor_exif_info,
camera_get_sensor_result_exif_info, camera_get_iommu_status,
camera_set_preview_buffer, camera_set_video_buffer, camera_set_zsl_buffer,
queue_buffer, camera_set_video_snapshot_buffer,
camera_set_zsl_snapshot_buffer, camera_zsl_snapshot_need_pause,
camera_get_isp_handle, camera_lls_enable, camera_is_lls_enabled,
camera_vendor_hdr_enable, camera_is_vendor_hdr, camera_set_lls_shot_mode,
camera_get_lls_shot_mode, camera_get_last_preflash_time,camera_get_isp_info, camera_start_burst_notice,
camera_end_burst_notice, NULL, NULL, dump_jpeg_file, camera_get_gain_thrs,
camera_set_sensor_info_to_af, camera_get_sensor_max_fps,
camera_snapshot_is_need_flash, camera_get_sensor_otp_info,
camera_get_sensor_vcm_step, camera_set_sensor_close_flag,
camera_set_reprocess_picture_size, camera_start_capture,
camera_stop_capture, camera_set_largest_picture_size, camera_set_alloc_picture_size,
camera_ioctrl,
camera_reprocess_yuv_for_jpeg, image_sw_algorithm_processing,
dump_image_with_isp_info,
#if defined(CONFIG_ISP_2_1)
camera_get_focus_point, camera_isp_sw_check_buf, camera_isp_sw_proc,
camera_raw_post_proc, camera_get_tuning_param,
#endif
#if defined(CONFIG_ISP_2_3) || defined(CONFIG_ISP_2_4) || \
defined(CONFIG_CAMERA_3DNR_CAPTURE_SW) || \
defined(CONFIG_CAMERA_SUPPORT_ULTRA_WIDE)
camera_set_gpu_mem_ops,
#endif
#ifdef CONFIG_CAMERA_MM_DVFS_SUPPORT
camera_set_mm_dvfs_policy,
#endif
camera_set_original_picture_size,
};
那么SprdCamera3OEMIf中调用的queue_buffer 也就走到了SprdOEMCamera中了。
7,SprdOEMCamera::queue_buffer
cmr_s32 queue_buffer(cmr_handle camera_handle, cam_buffer_info_t buffer,
int steam_type) {
cmr_int ret = CMR_CAMERA_SUCCESS;
ret = local_queue_buffer(camera_handle, buffer, steam_type);
return ret;
}
8,cmr_oem::local_queue_buffer
cmr_oem中的实现,我们只截取preview相关的这一条:
cmr_s32 local_queue_buffer(cmr_handle oem_handle, cam_buffer_info_t buffer,
int steam_type) {
cmr_int ret = CMR_CAMERA_SUCCESS;
struct camera_context *cxt;
struct sensor_exp_info exp_info;
if (!oem_handle) {
CMR_LOGE("in parm error");
ret = -CMR_CAMERA_INVALID_PARAM;
goto exit;
}
cxt = (struct camera_context *)oem_handle;
switch (steam_type) {
case SPRD_CAM_STREAM_PREVIEW:
ret = cmr_preview_set_preview_buffer(cxt->prev_cxt.preview_handle,
cxt->camera_id, buffer);
if (ret) {
CMR_LOGE("cmr_preview_set_preview_buffer failed");
goto exit;
}
break;
9,cmr_preview::cmr_preview_set_preview_buffer
cmr_preview的流程我们在之前的文章中也介绍了,我们看到 cmr_preview_set_preview_buffer 就是发送了一个message,最终的处理流程是在 prev_set_preview_buffer
10,cmr_preview::prev_set_preview_buffer
prev_set_preview_buffer的流程主要包括两方面:
- 是将入参 cam_buffer_info_t *buffer 的数据放到如下:
- prev_cxt->prev_fd_array[valid_num]
- prev_cxt->prev_phys_addr_array[valid_num]
- prev_cxt->prev_virt_addr_array[valid_num]
- prev_cxt->prev_frm[valid_num]
- 调用 handle->ops.channel_buff_cfg
channel_buff_cfg 是在cmr_preview.h中定义的结构体 struct preview_md_ops 下的指针函数,我们看不到具体实现,但是可以猜测 channel_buff_cfg 就是要将我们在 SprdCamera3Mem中map得到的 addr_vir 地址给到更底层的DCAM,用来装下一帧的预览数据的。
到这里,我们从SprdCamera3HW中的 channel->request 追过来的流程就结束了。总结下,就是要将map到的 addr_vir 设到底层去装预览数据。
装数据的地址下去了,那么接下来就要去看数据上来的处理流程了, 下面我们再从帧数据上来的地方开始追。
处理预览帧数据
我们之前介绍cmr_grab,说它就是hal端能拿到底层帧数据最开始的地方,我们就从cmr_grab中开始。
1,cmr_grab::cmr_grab_thread_proc
我们在介绍cmr_grab中说过,他拿到的帧数据就是通过grab_evt_cb向上回调的。
(*p_grab->grab_evt_cb)(evt_id, &frame,(void *)p_grab->init_param.oem_handle);
该回调就为cmr_oem中的 camera_grab_evt_cb
2,cmr_oem::camera_grab_evt_cb
我们截取 cmr_grab_evt_reg 的关键内容看下,又调到了 camera_send_channel_data
cmr_grab_evt_reg(grab_handle, camera_grab_evt_cb);
void camera_grab_evt_cb(cmr_int evt, void *data, void *privdata) {
switch (evt) {
case CMR_GRAB_TX_DONE:
if (frame->is_4in1_frame && frame->fmt != CAM_IMG_FMT_BAYER_MIPI_RAW) {
camera_4in1_handle(evt, data, privdata);
}
camera_send_channel_data((cmr_handle)cxt, receiver_handle, evt, data);
3,cmr_oem::camera_send_channel_data
if (cxt->prev_cxt.preview_eb && cxt->prev_cxt.preview_channel_id == frm_ptr->channel_id) {
ret = cmr_preview_receive_data(cxt->prev_cxt.preview_handle,cxt->camera_id, evt, data);
}
流程又转到 cmr_preview中去了
4,cmr_preview::cmr_preview_receive_data
cmr_preivew.c中以cmr_ 开头的函数基本上都是发送一个message,本身没有什么逻辑。其message的处理是prev_receive_data 函数,进一步又会调用 prev_frame_handle。
cmr_preview_receive_data ==》 prev_receive_data ==》 prev_frame_handle ==》prev_preview_frame_handle
5,cmr_preview::prev_preview_frame_handle
prev_preview_frame_handle的主要逻辑分为三步:
- prev_construct_frame
- prev_pop_preview_buffer
- 数据回调
6,cmr_preview::prev_construct_frame
prev_construct_frame 主要是根据入参struct frm_info *info找到 prev_cxt->prev_frm[]中对应的frm_id,由此可以得到对应的 prev_cxt->prev_frm[frm_id]数据,即本次上来的预览帧数据保存的地址信息。该数据用作两处:
- 填充到frame_type
- 发送到预览跑的算法中:包括 fd、3dnr、ai 等等
7,cmr_preview::prev_pop_preview_buffer
prev_pop_preview_buffer 主要是整理 prev_cxt->prev_phys_addr_array[] 和 prev_cxt->prev_frm[]的内容,使数据前移一位,覆盖位置0处的数据。
for (i = 0; i < (cmr_u32)(valid_num - 1); i++) {
prev_cxt->prev_phys_addr_array[i] = prev_cxt->prev_phys_addr_array[i + 1];
prev_cxt->prev_virt_addr_array[i] = prev_cxt->prev_virt_addr_array[i + 1];
prev_cxt->prev_fd_array[i] = prev_cxt->prev_fd_array[i + 1];
memcpy(&prev_cxt->prev_frm[i], &prev_cxt->prev_frm[i + 1],sizeof(struct img_frm));
}
8,回调 步骤6 中填充的数据
cb_data_info.cb_type = PREVIEW_EVT_CB_FRAME;
cb_data_info.func_type = PREVIEW_FUNC_START_PREVIEW;
cb_data_info.frame_data = &frame_type;
prev_cb_start(handle, &cb_data_info);
prev_cb_start 的处理:
case PREV_EVT_CB_START:
cb_data_info = (struct prev_cb_info *)message->data;
if (!handle->oem_cb) {
CMR_LOGE("oem_cb is null");
break;
}
ret = handle->oem_cb(handle->oem_handle, cb_data_info->cb_type,
cb_data_info->func_type, cb_data_info->frame_data);
if (cb_data_info->frame_data) {
free(cb_data_info->frame_data);
cb_data_info->frame_data = NULL;
}
break;
这里继续调到 cmr_oem中处理
9,cmr_oem处理回调
init_param.oem_cb = camera_preview_cb;
camera_preview_cb 会对 cb_type 修改
if (PREVIEW_FUNC_START_PREVIEW == func) {
oem_func = CAMERA_FUNC_START_PREVIEW;
} else if (PREVIEW_FUNC_STOP_PREVIEW == func) {
oem_func = CAMERA_FUNC_STOP_PREVIEW;
} else if (PREVIEW_FUNC_START_CAPTURE == func) {
oem_func = CAMERA_FUNC_TAKE_PICTURE;
} else {
CMR_LOGE("err, %d", func);
goto exit;
}
case PREVIEW_EVT_CB_FRAME:
oem_cb_type = CAMERA_EVT_CB_FRAME;
PREVIEW_FUNC_START_PREVIEW === 》CAMERA_FUNC_START_PREVIEW
PREVIEW_EVT_CB_FRAME ===》CAMERA_EVT_CB_FRAME
10,SprdCamera3OEMIf::camera_cb
case CAMERA_FUNC_START_PREVIEW:
obj->HandleStartPreview(cb, parm4);
break;
// HandleStartPreview 中的处理:
case CAMERA_EVT_CB_FRAME:
HAL_LOGV("CAMERA_EVT_CB_FRAME");
switch (getPreviewState()) {
case SPRD_PREVIEW_IN_PROGRESS:
receivePreviewFrame((struct camera_frame_type *)parm4);
break;
11,SprdCamera3OEMIf::receivePreviewFrame
关于 receivePreviewFrame 的逻辑,我们在之前介绍SprdCamera3OEMIf的文章中有讲过,cam3OEMIf收到预览帧的处理如下:
PreviewFrameFaceBeauty(frame, &beautyLevels);
PreviewFrameCamDebug(frame);
/* video stream */
PreviewFrameVideoStream(frame, buffer_timestamp);
/* preview stream, original code has goto exit */
ret = PreviewFramePreviewStream(frame, buffer_timestamp);
/* callback stream */
PreviewFrameCallbackStream(frame, buffer_timestamp);
/* yuv2 stream */
PreviewFrameYuv2Stream(frame, buffer_timestamp);
/* zsl stream */
PreviewFrameZslStream(frame, buffer_timestamp);
与预览流程相关的就是 PreviewFramePreviewStream 函数
12,SprdCamera3OEMIf::PreviewFramePreviewStream
PreviewFramePreviewStream 的关键逻辑是通过channel将帧数据callback上去
channel->channelCbRoutine(frame_num, buffer_timestamp,CAMERA_STREAM_TYPE_PREVIEW);
13,SprdCamera3RegularChannel::channelCbRoutine (buffDoneDQ)
channelCbRoutine的主要逻辑是构建一个 cam_result_data_info_t result_info ,其中当然是包含了帧数据,然后将 result_info 继续向上回调。
cam_result_data_info_t result_info;
result_info.is_urgent = false;
result_info.buffer = buffer;
result_info.frame_number = frame_number;
result_info.stream = stream;
result_info.timestamp = timestamp;
result_info.buff_status = CAMERA3_BUFFER_STATUS_OK;
result_info.msg_type = CAMERA3_MSG_SHUTTER;
mChannelCB(&result_info, mUserData);
channelCbRoutine还有一个非常重要的操作:
ret = mCamera3Stream[index]->buffDoneDQ(frame_number, &buffer);
还记得我们在 下发预览请求 中的第3步中调用了 buffDoneQ么。 这两者buffDoneDQ 和 buffDoneQ是相反的操作。
- 在预览请求的时候通过 SprdCamera3GrallocMemory 的map 函数得到buffert的虚拟地址
- 在拿到预览帧数据回调的时候通过SprdCamera3GrallocMemory 的unmap 函数释放掉虚拟地址
到这里 处理预览帧数 的流程也完成了。我们也将预览请求和预览回调的整个从 hal 到oem 在到 hal 的流程串通了。本篇涉及的逻辑比较多,有些细节部分我们并没有展开,因为之前有对这些关键的c/cpp文件单独的介绍,如有不清楚的可去翻一翻之前的文章。
log 跟踪
最后,我们通过一份点击桌面的CameraApp来启动camera预览的log来看下两个关键数据
- frameNumber
- addr_vir
顺序增长的 frameNumber
在发送预览请求的HWI下的processCaptureRequest 函数中会有如下log
HAL_LOGD("camId=%d, bufs_num=%d, frame_num=%d, cap_intent=%d, pic_req=%d, "
"first_regular_req=%d",
mCameraId, request->num_output_buffers, request->frame_number,
captureIntent, mPictureRequest, mFirstRegularRequest);
在SprdCamera3OEMIf接收帧数据函数 PreviewFramePreviewStream 中有如下根据帧数据y_vir_addr获取 frame_num的log
cmr_uint buff_vir = (cmr_uint)(frame->y_vir_addr);
ret = pre_stream->getQBufNumForVir(buff_vir, &frame_num);
HAL_LOGD("mCameraId=%d, prev:fd=0x%x, vir=0x%lx, num=%d, width=%d, "
"height=%d, time=0x%llx, iso_value:%d",
mCameraId, (cmr_u32)frame->fd, buff_vir, frame_num, frame->width,
frame->height, buffer_timestamp, ae_iso);
我们来看下log的打印:
可以看到,基本上一帧请求,一帧回调,并且回调的 frame_num 一定小于 请求的 frame_num
Line 219697: 08-09 11:34:44.687 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=2, cap_intent=1, pic_req=0, first_regular_req=0
Line 219737: 08-09 11:34:44.695 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=3, cap_intent=1, pic_req=0, first_regular_req=0
Line 219862: 08-09 11:34:44.991 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=0, width=960, height=720, time=0x3c0ec14062d8, iso_value:2500
Line 219915: 08-09 11:34:45.020 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=4, cap_intent=1, pic_req=0, first_regular_req=0
Line 220022: 08-09 11:34:45.085 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=1, width=960, height=720, time=0x3c0ec7373dd8, iso_value:2500
Line 220054: 08-09 11:34:45.116 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=5, cap_intent=1, pic_req=0, first_regular_req=0
Line 220136: 08-09 11:34:45.189 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=2, width=960, height=720, time=0x3c0ecd2e43d0, iso_value:1000
Line 220159: 08-09 11:34:45.219 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=6, cap_intent=1, pic_req=0, first_regular_req=0
Line 220299: 08-09 11:34:45.290 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=3, width=960, height=720, time=0x3c0ed3243c40, iso_value:1000
Line 220325: 08-09 11:34:45.320 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=7, cap_intent=1, pic_req=0, first_regular_req=0
Line 220390: 08-09 11:34:45.330 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=4, width=960, height=720, time=0x3c0ed58722e0, iso_value:1250
Line 220428: 08-09 11:34:45.350 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=8, cap_intent=1, pic_req=0, first_regular_req=0
Line 220498: 08-09 11:34:45.369 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=5, width=960, height=720, time=0x3c0ed7ea28c0, iso_value:1250
Line 220526: 08-09 11:34:45.401 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=9, cap_intent=1, pic_req=0, first_regular_req=0
Line 220579: 08-09 11:34:45.407 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=6, width=960, height=720, time=0x3c0eda4cffc0, iso_value:1600
Line 220619: 08-09 11:34:45.435 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=10, cap_intent=1, pic_req=0, first_regular_req=0
Line 220649: 08-09 11:34:45.445 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=7, width=960, height=720, time=0x3c0edcaff600, iso_value:1600
Line 220712: 08-09 11:34:45.474 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=11, cap_intent=1, pic_req=0, first_regular_req=0
Line 220778: 08-09 11:34:45.493 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=8, width=960, height=720, time=0x3c0edf12d0e8, iso_value:1600
Line 220811: 08-09 11:34:45.524 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=12, cap_intent=1, pic_req=0, first_regular_req=0
Line 220858: 08-09 11:34:45.529 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=9, width=960, height=720, time=0x3c0ee1764fe0, iso_value:1600
Line 220892: 08-09 11:34:45.540 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=13, cap_intent=1, pic_req=0, first_regular_req=0
Line 220950: 08-09 11:34:45.567 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=10, width=960, height=720, time=0x3c0ee3d8adc8, iso_value:1600
Line 220992: 08-09 11:34:45.591 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=14, cap_intent=1, pic_req=0, first_regular_req=0
Line 221062: 08-09 11:34:45.609 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=11, width=960, height=720, time=0x3c0ee63bc730, iso_value:1250
Line 221084: 08-09 11:34:45.623 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=15, cap_intent=1, pic_req=0, first_regular_req=0
Line 221157: 08-09 11:34:45.652 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=12, width=960, height=720, time=0x3c0ee89e7b08, iso_value:1250
Line 221181: 08-09 11:34:45.674 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=16, cap_intent=1, pic_req=0, first_regular_req=0
Line 221247: 08-09 11:34:45.690 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=13, width=960, height=720, time=0x3c0eeb012710, iso_value:1250
Line 221269: 08-09 11:34:45.708 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=17, cap_intent=1, pic_req=0, first_regular_req=0
Line 221339: 08-09 11:34:45.729 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=14, width=960, height=720, time=0x3c0eed644c30, iso_value:1250
Line 221360: 08-09 11:34:45.741 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=18, cap_intent=1, pic_req=0, first_regular_req=0
Line 221436: 08-09 11:34:45.769 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=15, width=960, height=720, time=0x3c0eefc72330, iso_value:640
Line 221461: 08-09 11:34:45.791 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=19, cap_intent=1, pic_req=0, first_regular_req=0
Line 221560: 08-09 11:34:45.811 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=16, width=960, height=720, time=0x3c0ef22a30e0, iso_value:640
Line 221582: 08-09 11:34:45.825 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=20, cap_intent=1, pic_req=0, first_regular_req=0
Line 221619: 08-09 11:34:45.844 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=17, width=960, height=720, time=0x3c0ef48cfc28, iso_value:640
Line 221641: 08-09 11:34:45.859 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=21, cap_intent=1, pic_req=0, first_regular_req=0
Line 221757: 08-09 11:34:45.935 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=18, width=960, height=720, time=0x3c0ef9ead348, iso_value:640
Line 221779: 08-09 11:34:45.959 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=22, cap_intent=1, pic_req=0, first_regular_req=0
Line 221874: 08-09 11:34:46.025 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=19, width=960, height=720, time=0x3c0eff48c9a8, iso_value:1250
Line 221896: 08-09 11:34:46.043 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=23, cap_intent=1, pic_req=0, first_regular_req=0
Line 222009: 08-09 11:34:46.120 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=20, width=960, height=720, time=0x3c0f04a69ce0, iso_value:1250
Line 222042: 08-09 11:34:46.144 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=24, cap_intent=1, pic_req=0, first_regular_req=0
Line 222086: 08-09 11:34:46.156 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=21, width=960, height=720, time=0x3c0f07097f98, iso_value:1250
Line 222136: 08-09 11:34:46.178 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=25, cap_intent=1, pic_req=0, first_regular_req=0
Line 222187: 08-09 11:34:46.196 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6f, vir=0xd90d9000, num=22, width=960, height=720, time=0x3c0f096d3158, iso_value:1250
Line 222231: 08-09 11:34:46.211 532 999 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=26, cap_intent=1, pic_req=0, first_regular_req=0
Line 222318: 08-09 11:34:46.244 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x74, vir=0xd8fdb000, num=23, width=960, height=720, time=0x3c0f0bcf9710, iso_value:1250
Line 222381: 08-09 11:34:46.263 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=27, cap_intent=1, pic_req=0, first_regular_req=0
Line 222447: 08-09 11:34:46.282 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x68, vir=0xd8dce000, num=24, width=960, height=720, time=0x3c0f0e325e70, iso_value:1250
Line 222477: 08-09 11:34:46.297 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=28, cap_intent=1, pic_req=0, first_regular_req=0
Line 222546: 08-09 11:34:46.320 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x16, vir=0xd92d5000, num=25, width=960, height=720, time=0x3c0f109525d0, iso_value:1250
Line 222567: 08-09 11:34:46.329 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=29, cap_intent=1, pic_req=0, first_regular_req=0
Line 222648: 08-09 11:34:46.363 532 26402 D Cam3OEMIf: 4437, PreviewFramePreviewStream: mCameraId=0, prev:fd=0x6a, vir=0xd91d7000, num=26, width=960, height=720, time=0x3c0f12f80c70, iso_value:1250
Line 222678: 08-09 11:34:46.380 532 1000 D Cam3HWI : 1708, processCaptureRequest: camId=0, bufs_num=1, frame_num=30, cap_intent=1, pic_req=0, first_regular_req=0
循序使用的fd & addr_vir
SprdCamera3GrallocMemory::map 到的 fd & addr_vir :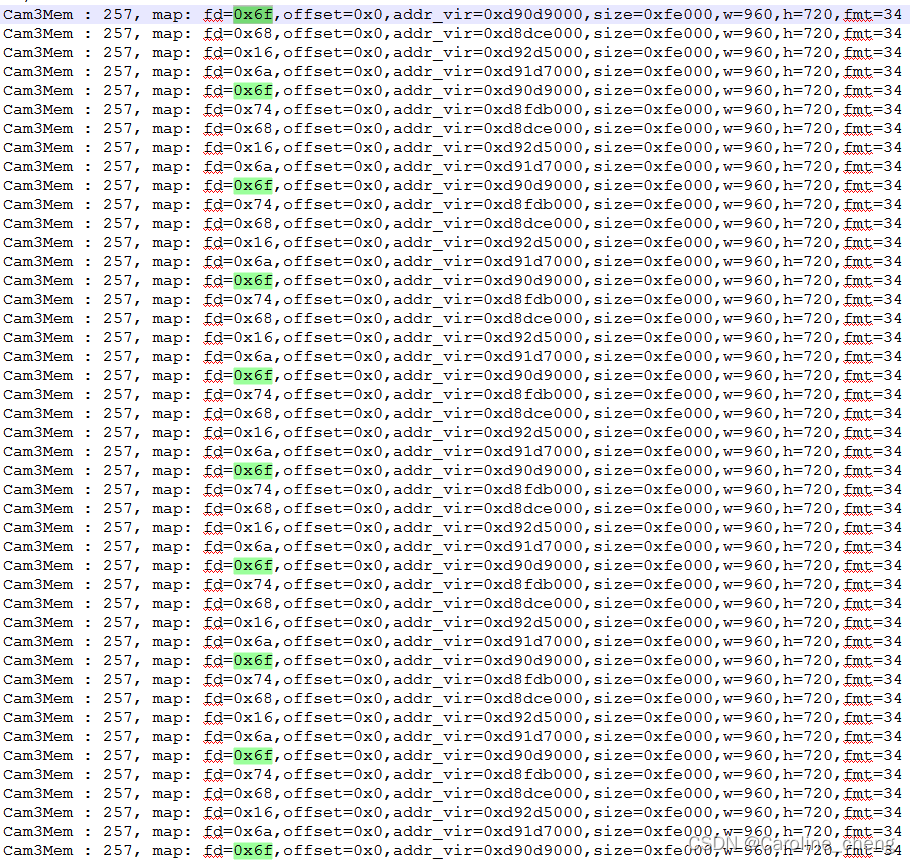
SprdCamera3OEMIf在PreviewFramePreviewStream中收到的帧数据的 fd & addr_vir :
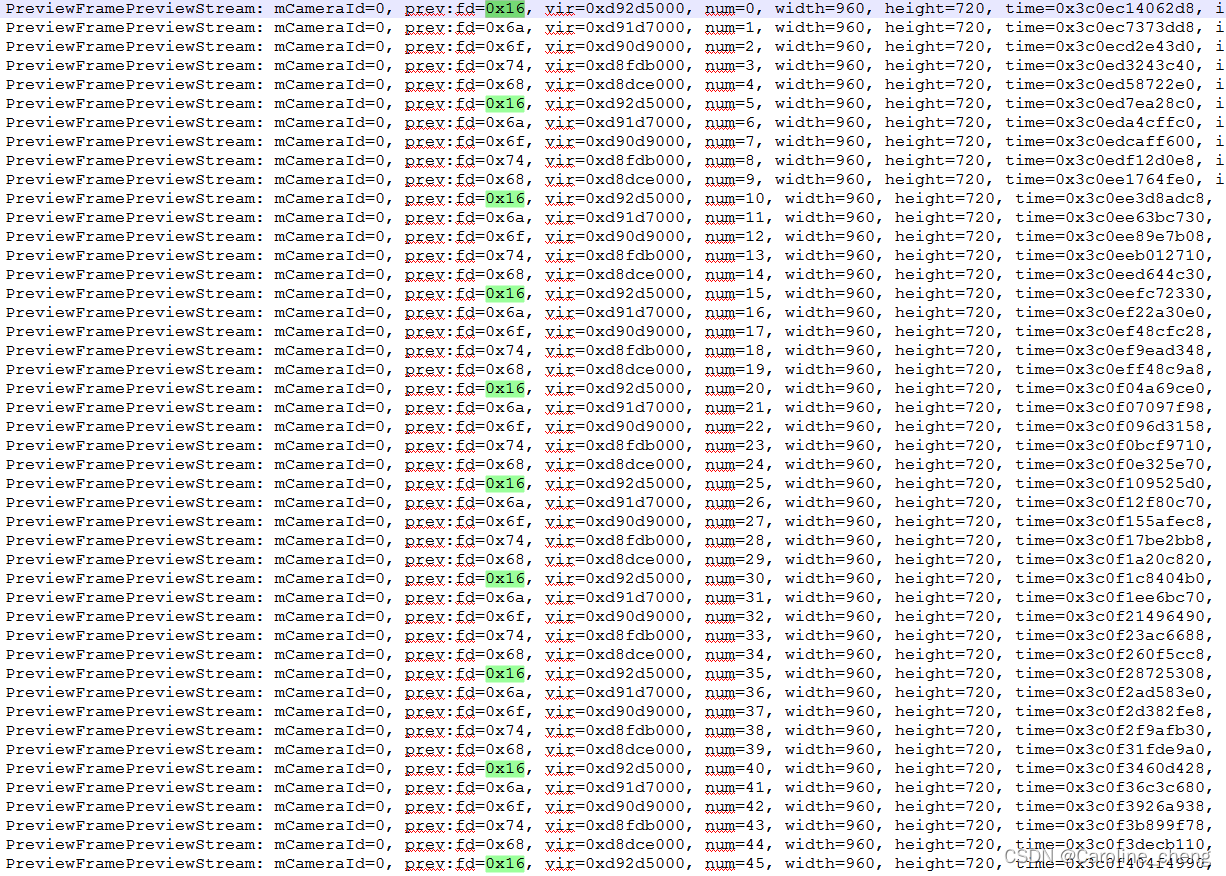
我们看到 fd 和 addr_vir 只有5个在一直循环:
fd=0x6f,offset=0x0,addr_vir=0xd90d9000
fd=0x74,offset=0x0,addr_vir=0xd8fdb000
fd=0x68,offset=0x0,addr_vir=0xd8dce000
fd=0x16,offset=0x0,addr_vir=0xd92d5000
fd=0x6a,offset=0x0,addr_vir=0xd91d7000
这与我们在SprdCamera3OEMIf中看到得 mZslNum 的值是一致的,也就是说hal申请了5个buffer,预览帧数据一帧一帧的请求,然后在一帧一帧的回调上去,就是在不停地往这5个buffer写、读。
log也进一步验证的我们之前跟踪的预览请求和回调流程。
到这里,hal 和 oem 模块公同完成的预览请求和回调的流程我们就讲完了。

















 373
373

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









