



BSR3100包含8个16bit的 PWM模块。每个PWM 都支持反向,死区控制。

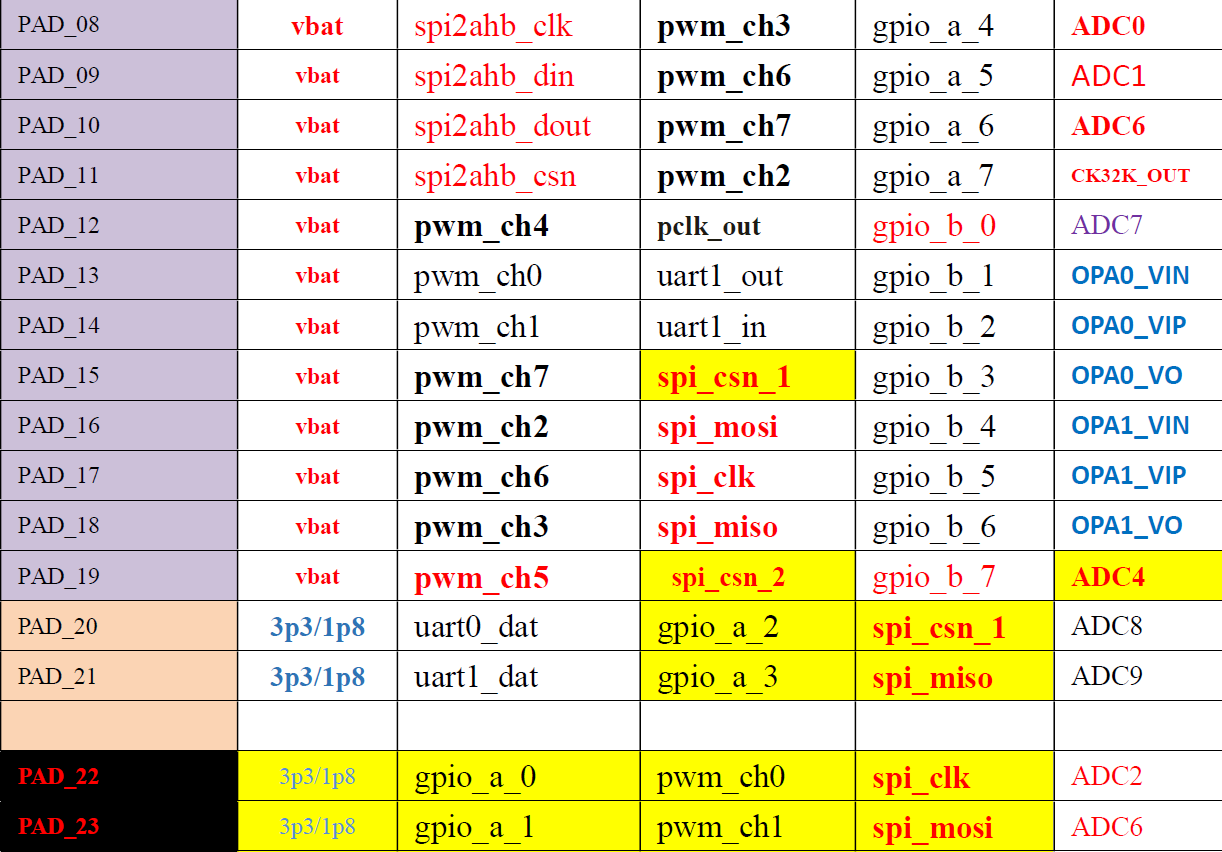
PWM管脚分配在5V IO域和3.3V 的IO域上:
第1种应用:电机驱动
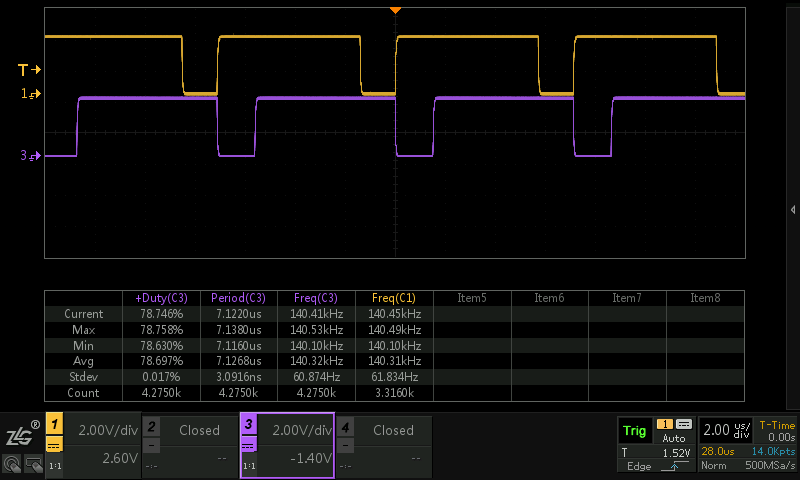
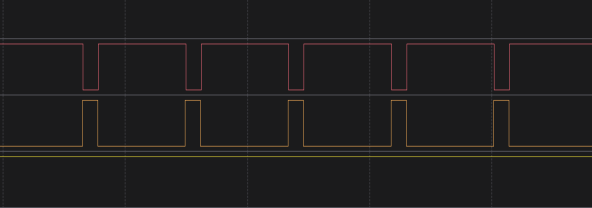
PWM控制波形1:
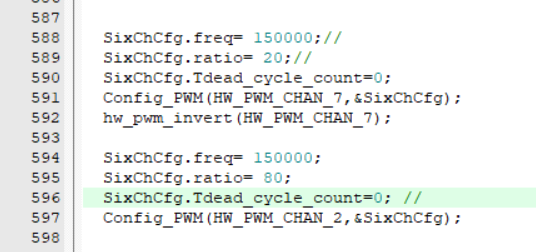
对应的代码:
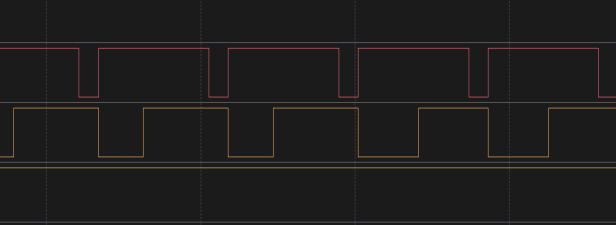
PWM控制波形2:
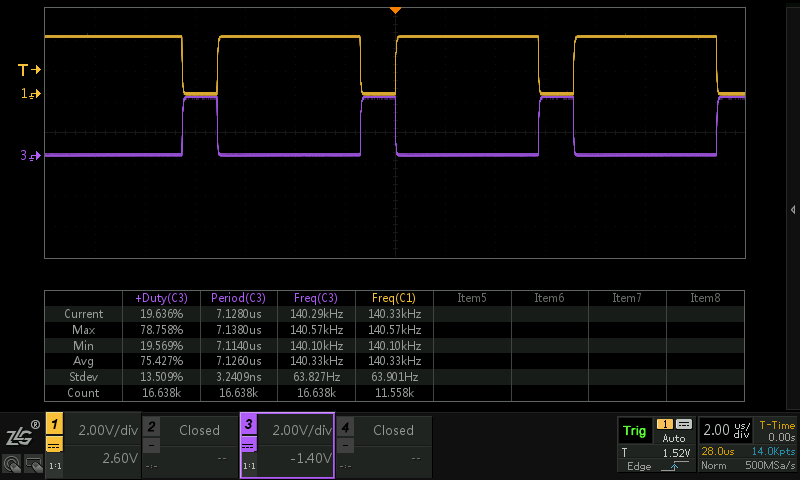
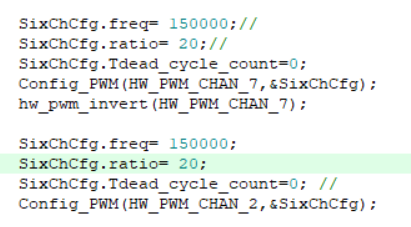
对应着的代码如上图片所示。
第2种应用:充电与升压
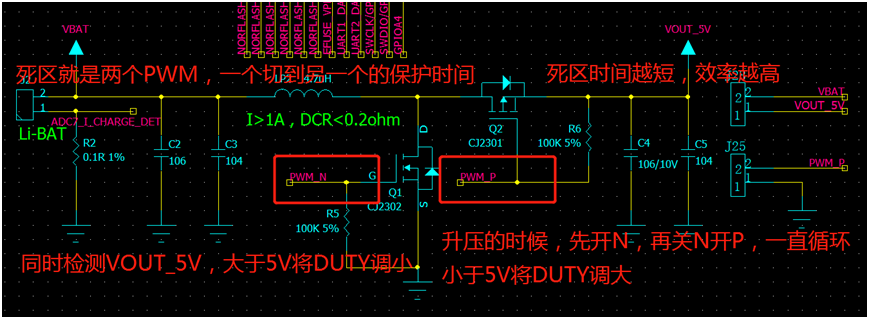
详细实现代码,请在qq群中索取。
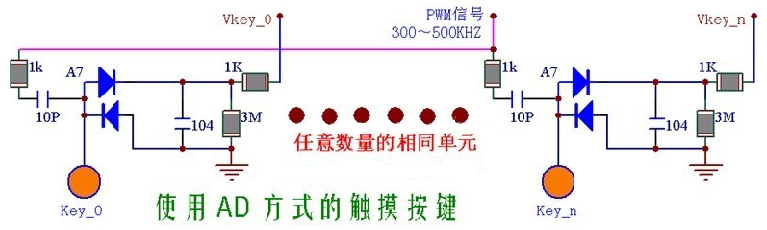
第3种应用:电容触摸按键
下图的原理图,每一个按键包含了 10P,104 电容器,一只贴片封装的双二极管, 三个电阻。
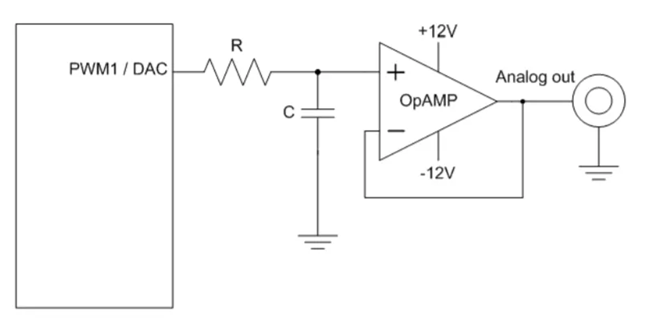
第4种应用:语音播放
BSR3100的IO支持3.3V IO,1.8V IO,还有VBAT IO。在电池供电的应用场景中,可以非常简洁的满足多电压域场景下的用户需求。BSR3100的优势和特点:
1,集成了专用LDO(Norflash和LCD各一个)
2,外置Norflash更灵活
3,专用DMA
4,高速SPI配合LCD显示,速度最高可达12Mbps
5,芯片内部专用ADC5测量VBAT,读寄存器即可
6,专用MOS用于LCD背光控制,进一步省去板级上的外围器件
7,电流采集专用运放和高速比较器,比较器可以连接在中断列表中,软件快速响应
8,丰富的IO类型,1.8V IO 4个,5V IO 12个,3.3V IO 8个(不包含专用IO)
9,运算放大器可以内部连接ADC8和ADC9,不占用管脚资源
应用场景:
所有电池供电的带LCD/OLED/TFT显示屏的电子产品。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









