



常规三连杆
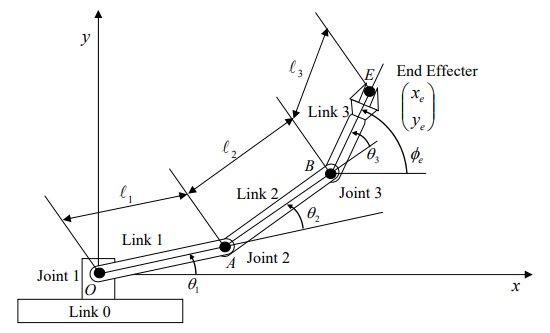
上述公式实现正解(Forward Kinematic)
为解决其逆运动学问题,运动学结构重绘于下图。问题在于找到三个关节角度θ1、θ2、θ3,使末端执行器到达期望位置和姿态(xe,ye,ϕe)。我们采用两步法:首先,根据(xe,ye,ϕe)求解腕部位置(点B);然后,根据腕部位置求解θ1、θ2;角度θ3可直接由腕部位置确定
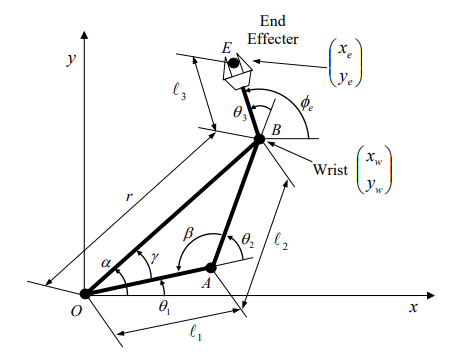
接着
根据余弦定理可得:
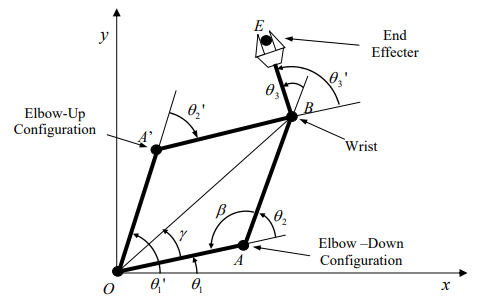
而另一个解可得:
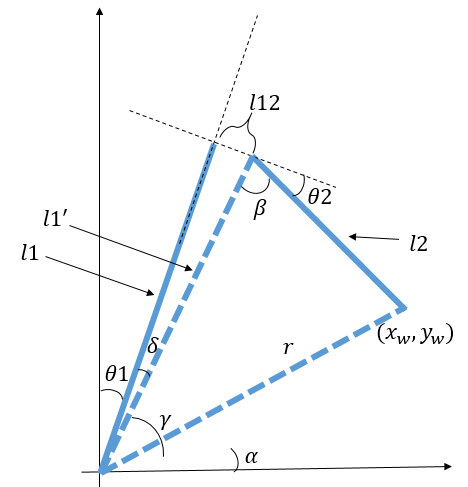
SO-ARM100(微变化的三连杆)
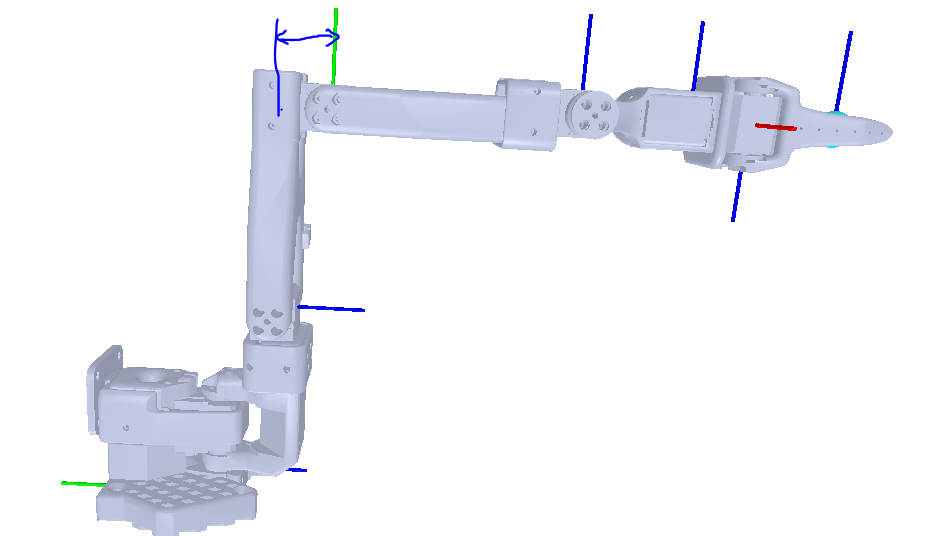
此机械臂在第二第三关节中间有一段固定偏移。下述定义的关节角与上方不一致,这个定义直接符合上述机械臂里的角度定义,无需额外转换。

















 3184
3184

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









