






这几天准备用分别用ego-planner与fast-planner进行飞行仿真。本来准备在双系统的ubuntu上安装ego-planner(之前ubuntu上已经安装过vins-fusion、vins-mono与fast-planner测试港科大数据集),但是克隆之后,发现PX4配置出现冲突(这个问题还是有一些棘手,因为造成了之前本可以运行的算法出现error,主要的原因是因为有重复的包出现,导致寻找相关文件是会遇见相同的文件名(multitudinous same names)),之后通过查看各个包安装配置时间。逐个删除多余的包,再重新编译,得以恢复。
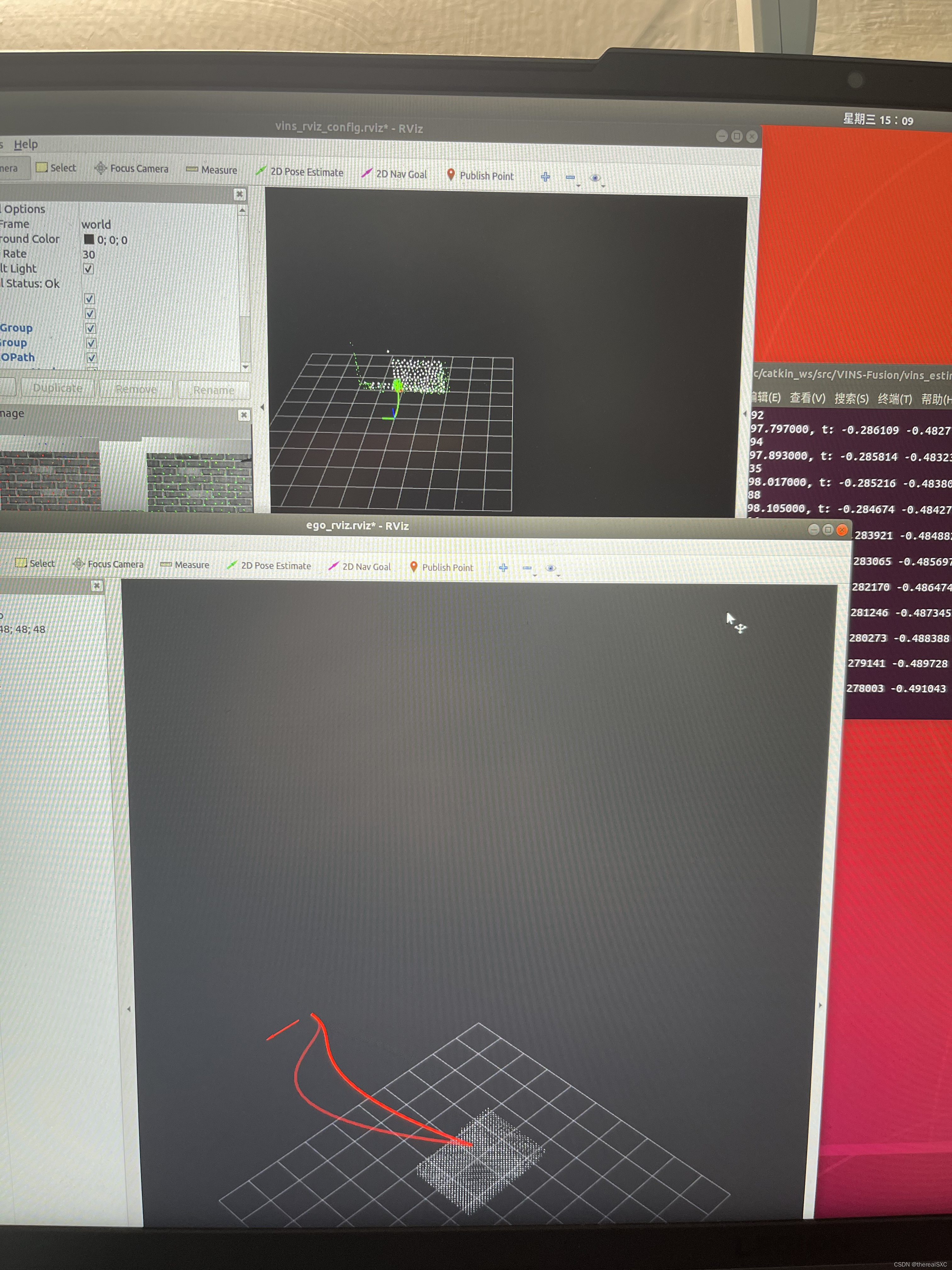
之后再系统上安装了ego-planner,之后编译成功,与vins-fusion,gazebo仿真启动,效果如下(需要在启动gazebo仿真之后,先启动vins-fusion,之后才可启动ego-planner。红色线为ego-planner的rviz,图中的白色为周围物体的三维图)。
吸取之前的经验,针对可能发生的配置冲突,于是决定暂时不在双系统上应用,建立新的虚拟机,在虚拟机上测试fast-planner在仿真飞行(之前虽然利用fast-planner允许过港科大的数据集,但是并未在gazebo仿真结合过)。
在虚拟机上配置PX4与gazebo的过程中,由于网速不够,代理不是很好用,./setup.sh从GitHub上克隆到子模组路径的过程中经常失败(子模路径与普通克隆存在差别,因此不能利用诸如在windows上利用加速器克隆再移动到Ubuntu上,或者是gitee等国内镜像网站克隆)。
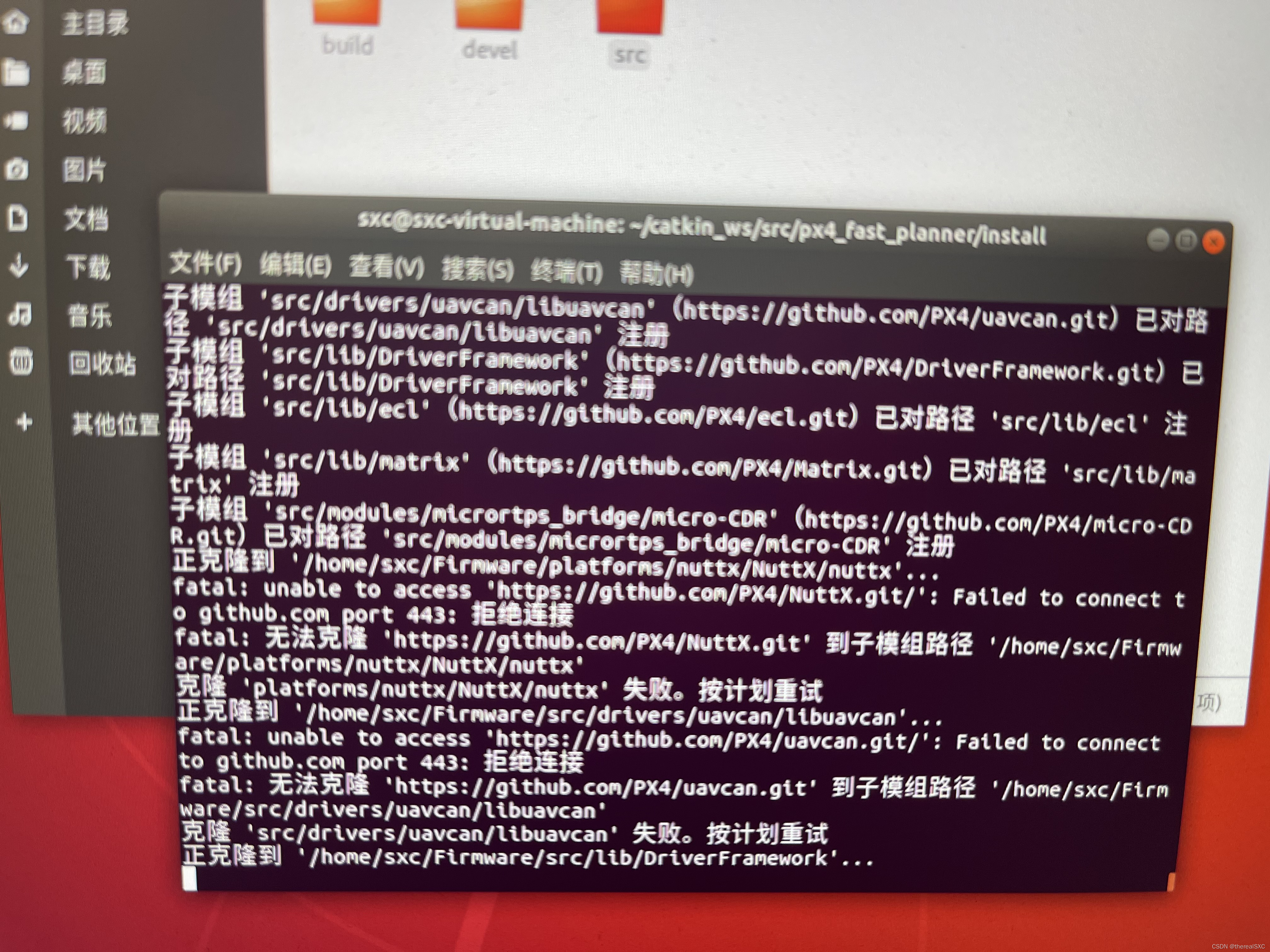
之后经过四五个小时的无数次的
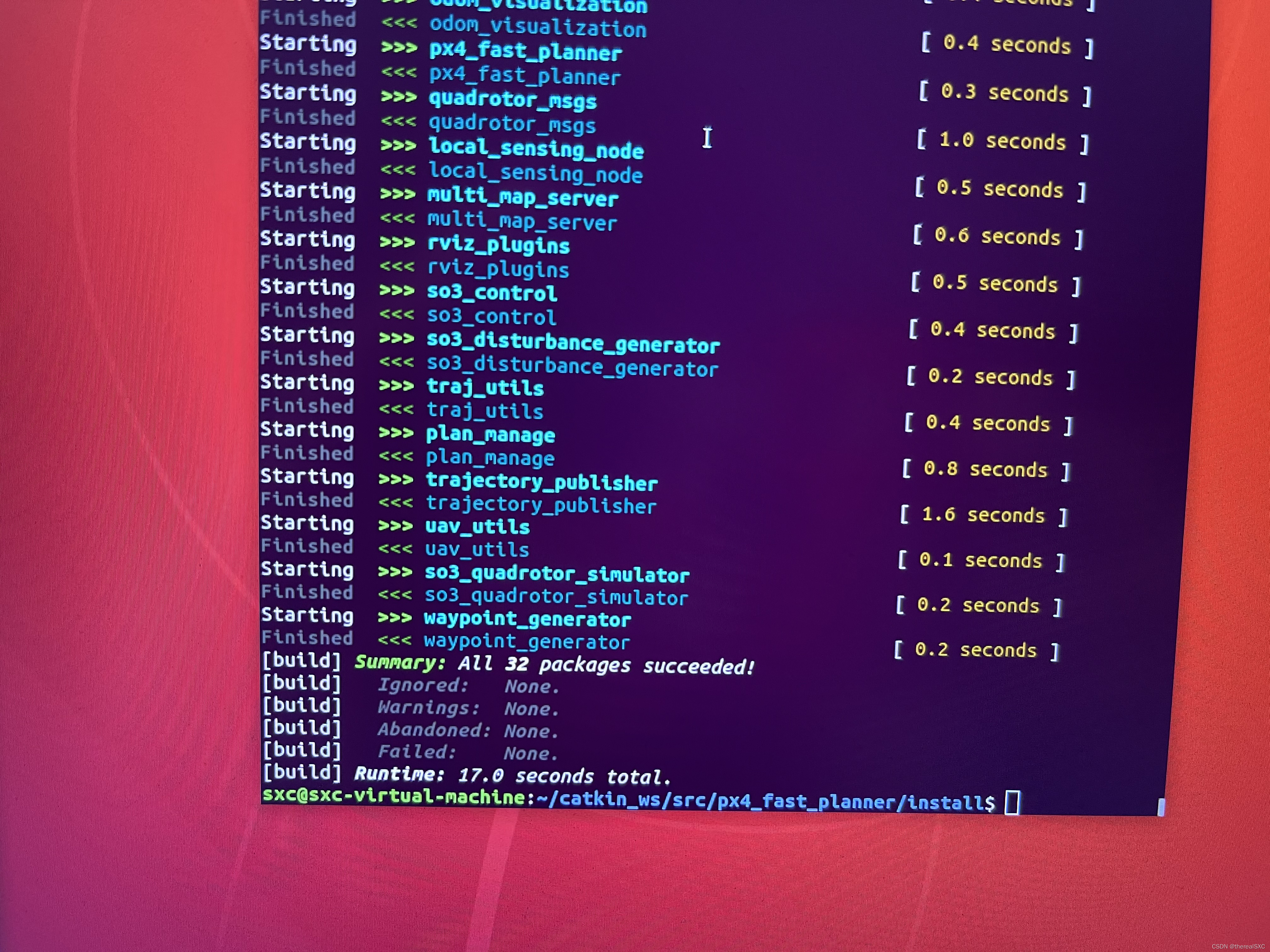
git submodule update --init终于将PX4,MAVROS,fast-planner全部克隆完成,于是开始编译。但是再配置过程中也出现了error,所幸出现的问题都并不难解决,解决之后实现成功编译配置(All 32 packages succeeded!)。
之后再启动仿真的过程中,出现PX4文件丢失的问题(can't locate node [px4] in package [px4]),之后通过make px4_sitl gazebo 解决。
下面的问题是在仿真中出现的一个比较主要的问题,就是无人机在启动之后会失去平衡,左摇右晃,十分不稳定。最后发现是几何控制器geometric_controller出现问题,在geometric_controller的.launch文件中加上下面这三句代码即可解决
<param name="attctrl_constant" value="0.3"/>
<param name="normallizedthrust_constant" value="0.06"/>
<param name="normallizedthrust_offset" value="0.1"/> 之后fast-planner可顺利运行,效果不错。但由于虚拟机的问题,运行过程不够流畅,会出现掉帧问题。
之后fast-planner可顺利运行,效果不错。但由于虚拟机的问题,运行过程不够流畅,会出现掉帧问题。
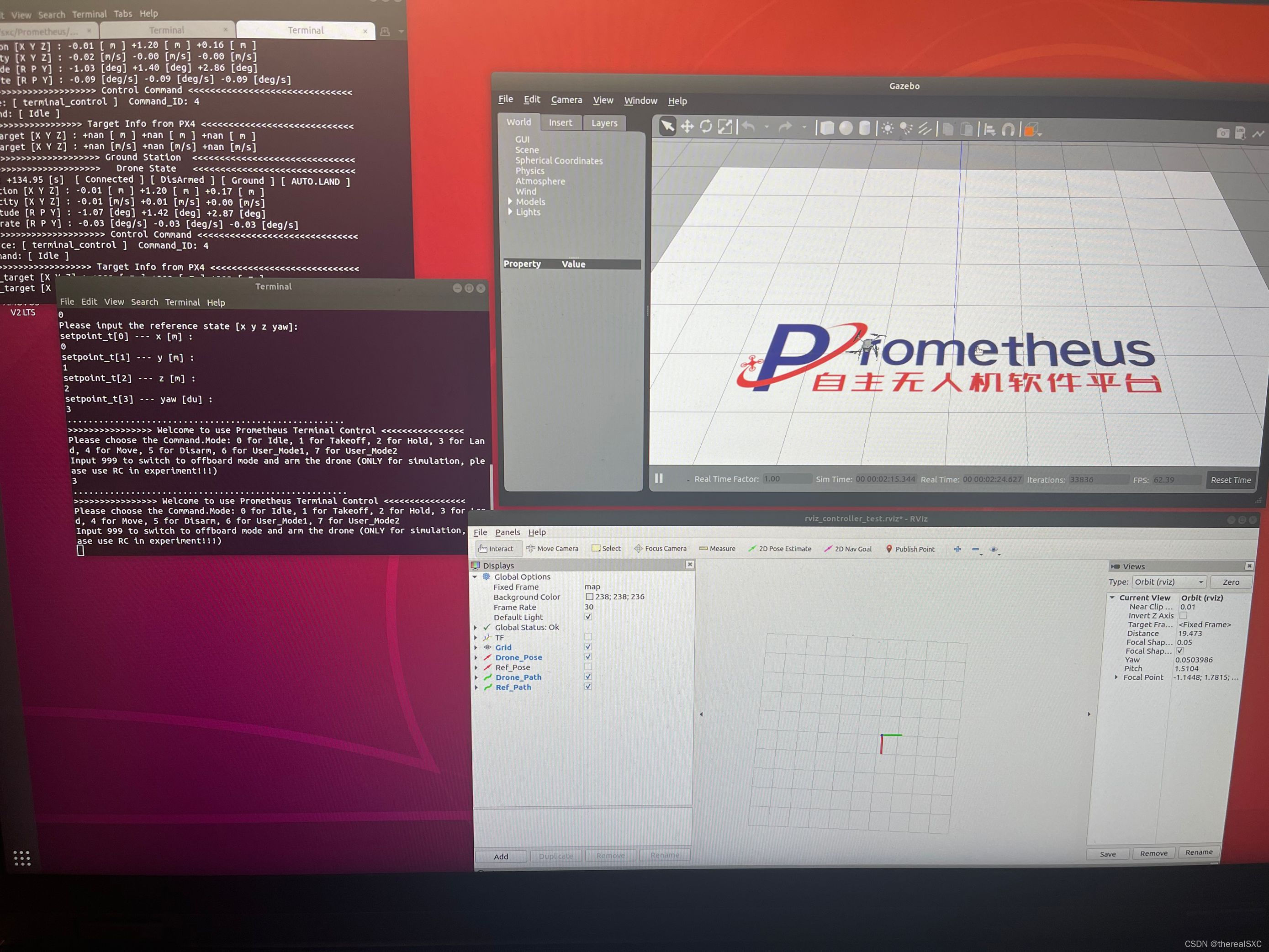
之后准备运行一下Prometheus仿真。再解决gazebo与vm虚拟机的问题后,有时gazebo在后台重复运行,就无法再打开新的gazebo,终结后台运行的gazebo即可。由于Prometheus为gitee上的,因此克隆过程十分流畅,之后运行Prometheus。
下面继续学习一下Prometheus代码

















 477
477

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









