








1. 环境配置
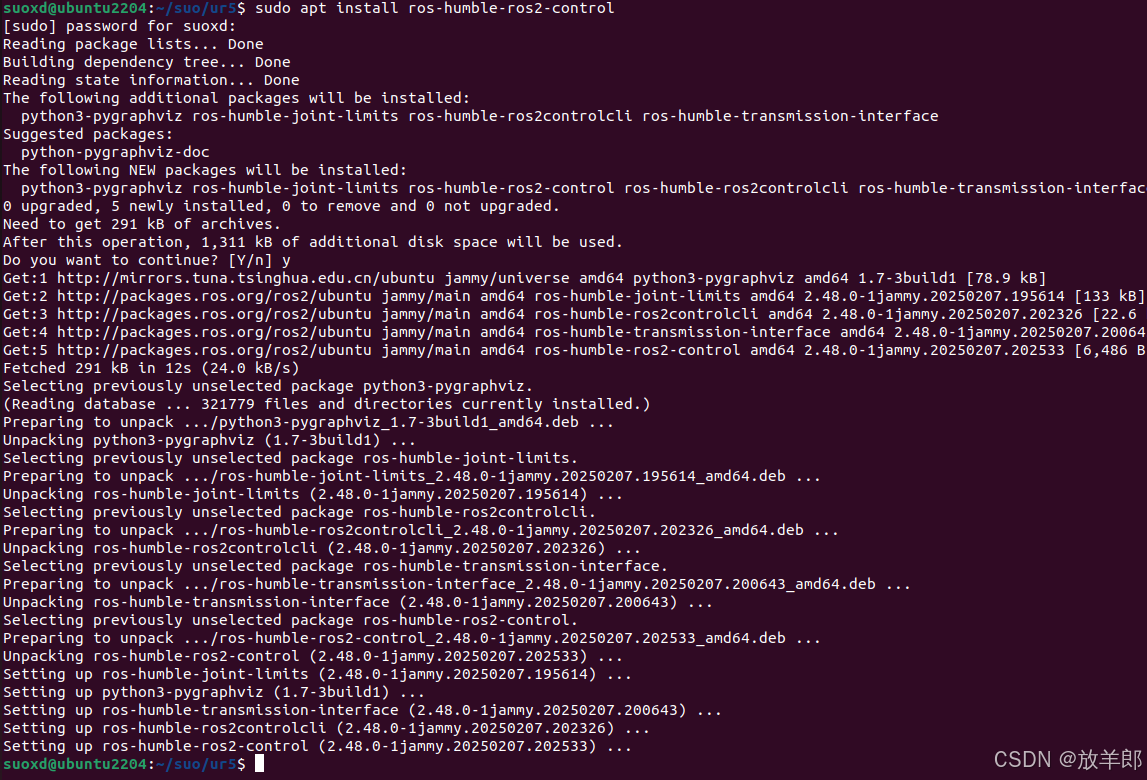
# 控制功能包
sudo apt install ros-humble-ros2-control
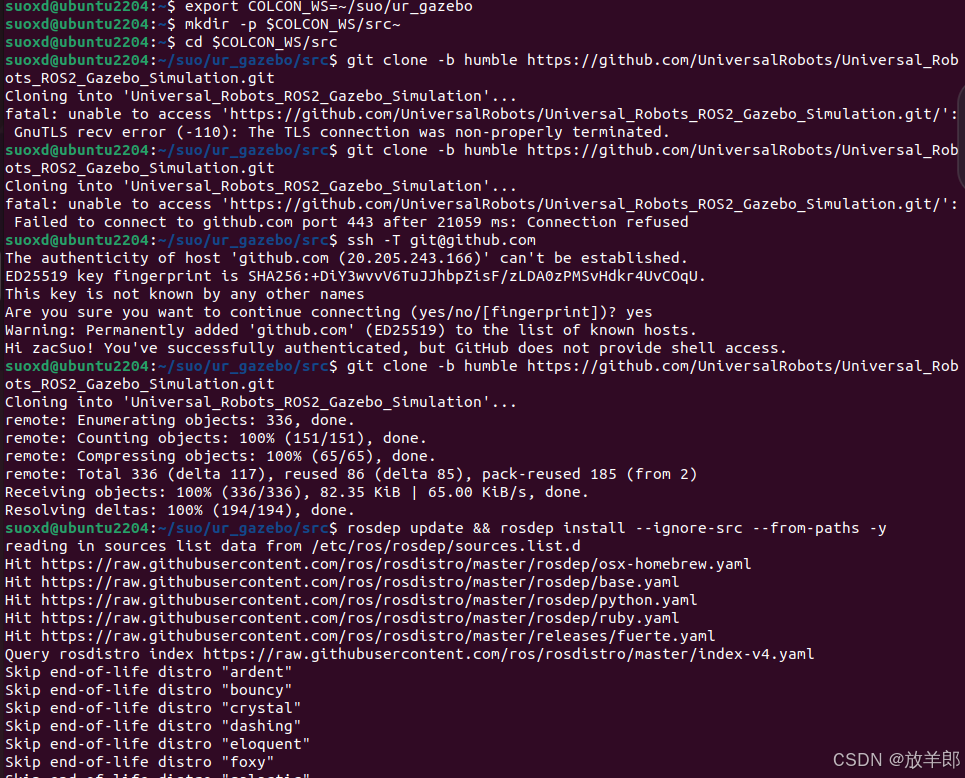
# 安装ur_simulation仿真环境
export COLCON_WS=~/suo/ur_gazebo
mkdir -p $COLCON_WS/src
cd $COLCON_WS/src
git clone -b humble https://github.com/UniversalRobots/Universal_Robots_ROS2_Gazebo_Simulation.git
rosdep update && rosdep install --ignore-src --from-paths -y
cd $COLCON_WS
colcon build --symlink-install
echo "source ~/suo/ur_gazebo/install/setup.bash" >> ~/.bashrc
source ~/.bashrc
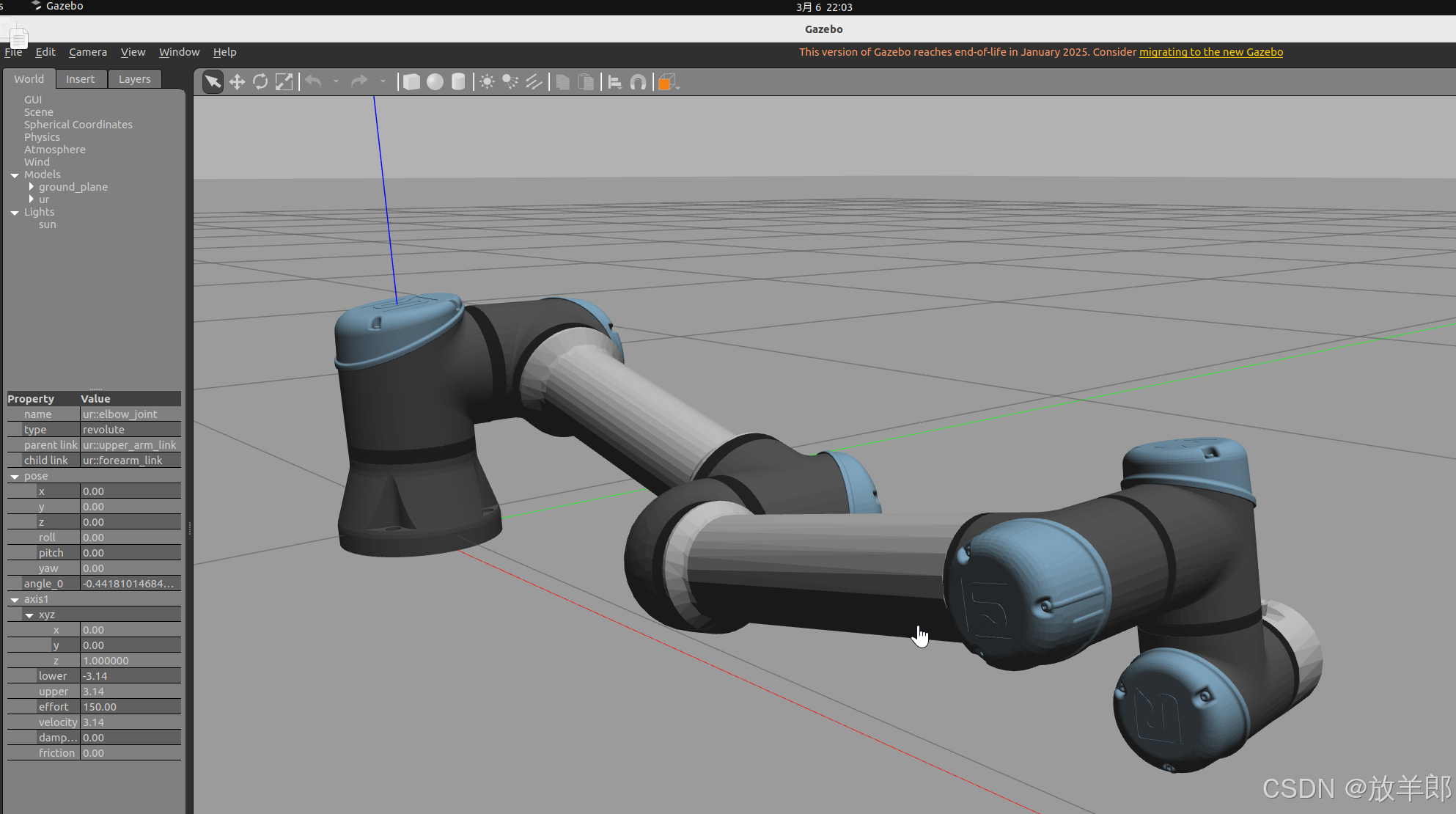
2. 仿真查看
#启动 Gazebo
ros2 launch ur_simulation_gazebo ur_sim_control.launch.py ur_type:=ur5
UR5
UR10
UR20
UR30


















 1628
1628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











