 手眼标定(EyeToHand)原理推导与求解
手眼标定(EyeToHand)原理推导与求解





标题原理推导
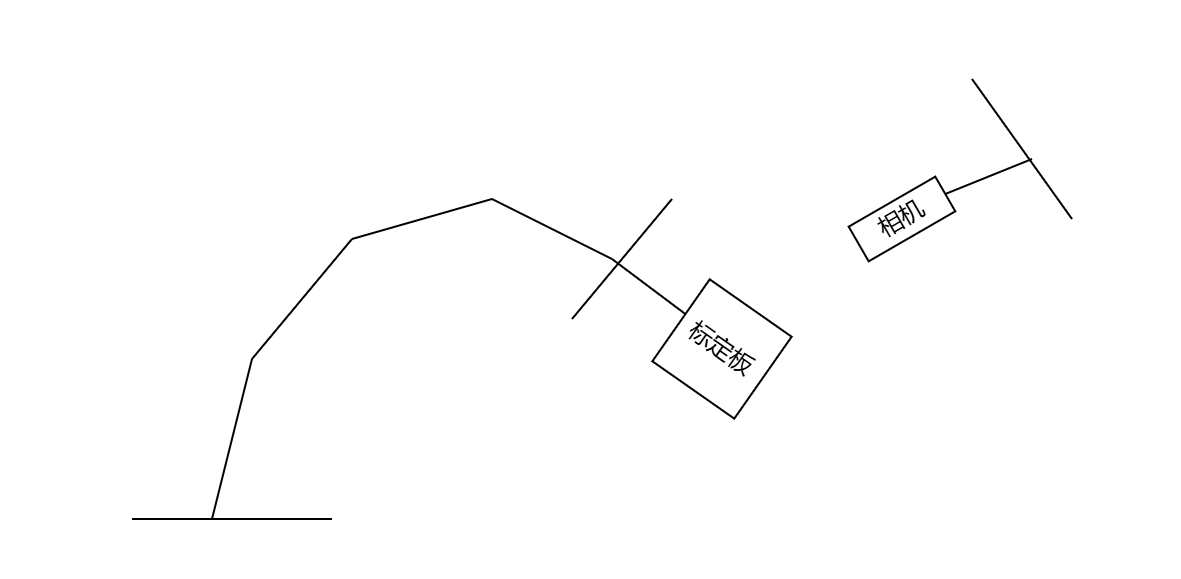
Base为基坐标系(B),工具末端坐标系(T),标定板为Mark坐标系(M),相机坐标系(C)
在眼在手外的时候,其实是要求解 C B A ^{B}_{C}A CBA 相机坐标系到Base基坐标系下的转换关系。
标定板上目标点坐标存在如下关系: T B A ∗ M T A = C B A ∗ M C A ^{B}_{T}A*^{T}_{M}A=^{B}_{C}A*^{C}_{M}A TBA∗MTA=CBA∗MCA → \quad \rightarrow \quad → M T A = B T A ∗ C B A ∗ M C A ^{T}_{M}A=^{T}_{B}A*^{B}_{C}A*^{C}_{M}A MTA=BTA∗CBA∗MCA
已知标定板与机械臂末端的相对位置固定不变,,即 M T A ^{T}_{M}A MTA 固定不变。
因此每个姿态下上式均成立: M T A = B T A i ∗ C B A ∗ M C A i ^{T}_{M}A=^{T}_{B}A_{i}*^{B}_{C}A*^{C}_{M}A_{i} MTA=BTAi∗CBA∗MCAi
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 925
925

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









