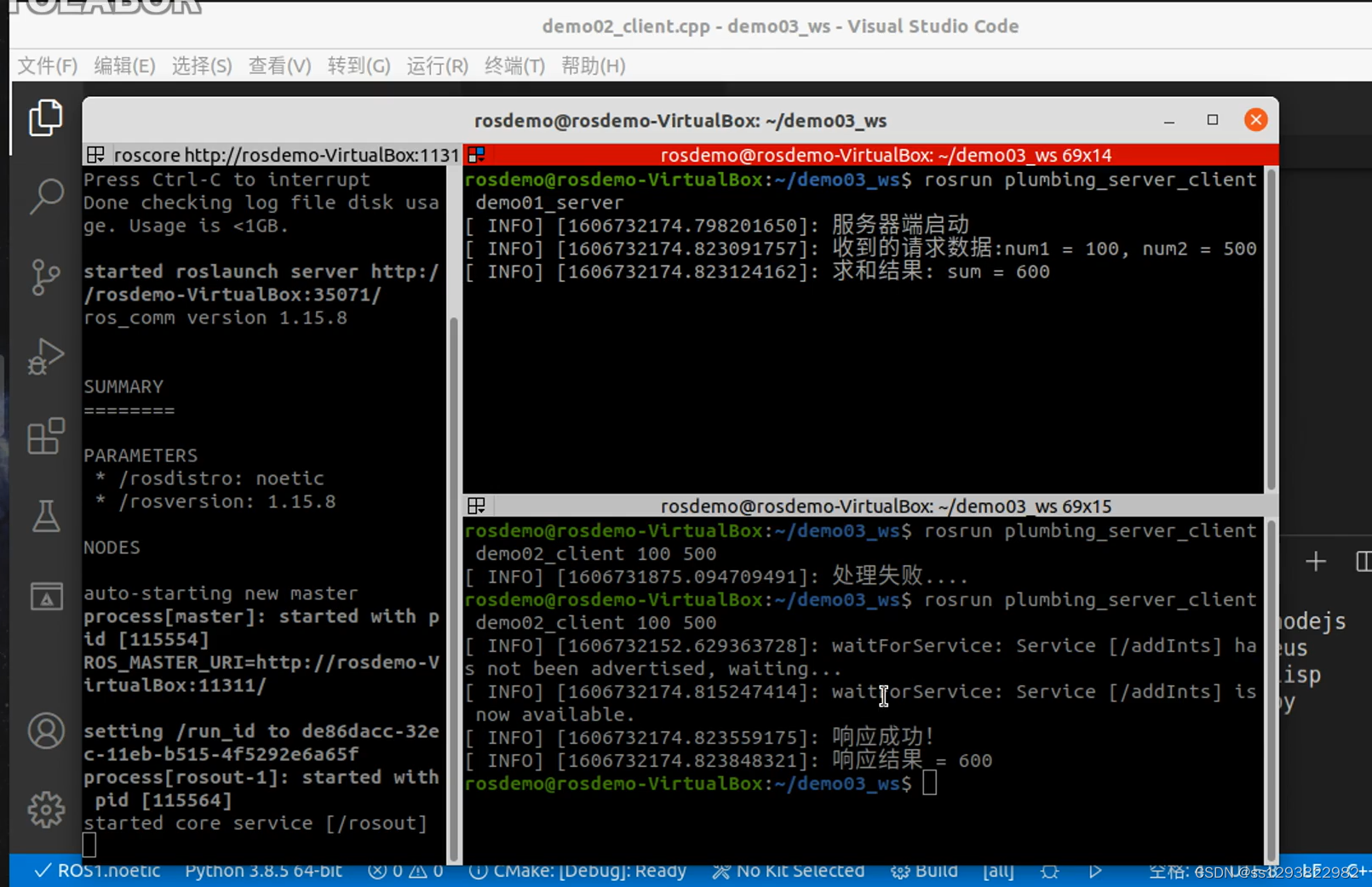
问题描述:终端运行出现以下错误 rosrun plumbing_server_client demo02_client 12 34 [ INFO] [1658024844.407470605]: waitForService: Service [/Addints] has not been advertised, waiting... 原因分析: 没有运行服务端而先运行了客户端,只需在运行一下服务端即可 解决方案: 在打开一个终端,输入并运行 rosrun _plumbing_server_client demo01_server

























 6万+
6万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











