



导读
在人类的世界里,导航不仅是规划路线,更是一种“社交行为”。在人多的走廊里,你会让路;在狭窄通道中,你会先观察对面的人是否要通过。而在机器人眼中,这些“礼貌动作”却没有被定义——它们既非障碍,也非目标。
小米智能汽车团队与清华大学、港科大(广州)联合提出的系统 EV-AD VLA,尝试让机器人真正理解“人与人之间的空间规则”。他们在 IROS 2025 RoboSense Challenge 的社会导航赛道上获得第二名,提出了一个核心概念:主动风险感知(Proactive Risk Perception)。这项机制让机器人在行进过程中不再被动避障,而是提前推理“谁可能挡路”“谁可能转向”,实现一种更自然、更人性的社会化导航方式。
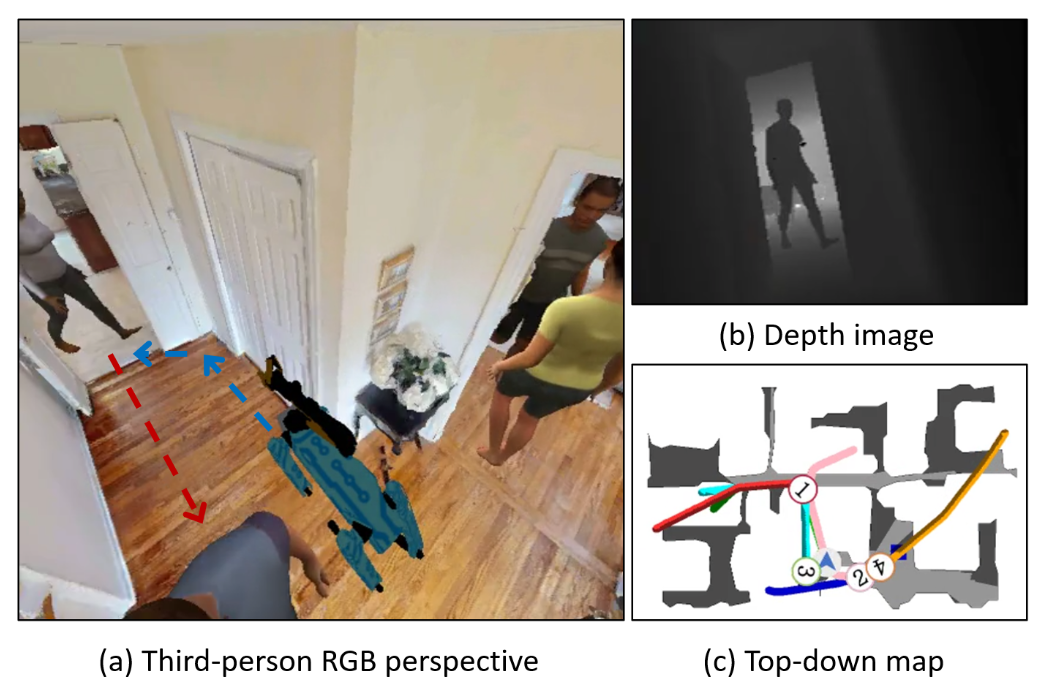
图1|社会导航任务示意图:这张图展示了社会导航(Social Navigation)任务的基本流程。如 (a) 所示,机器人需要在朝向目标点前进的同时(蓝色虚线)预测周围行人的运动轨迹(红色虚线),并主动避让。(b) 显示了机器人所接收的深度图输入,用于实时判断人类的距离与方位。(c) 为俯视参考图,仅用于可视化展示,机器人在实际任务中并不会使用该全局地图。整个过程体现了系统在“目标驱动”与“社交避障”之间的平衡能力
论文出处:IROS2025
论文标题:Team Xiaomi EV-AD VLA: Learning to Navigate Socially Through Proactive Risk Perception
论文作者:Erjia Xiao, Lingfeng Zhang, Yingbo Tang, Hao Cheng, Renjing Xu, Wenbo Ding
Lei Zhou, Long Chen, Hangjun Ye, Xiaoshuai Hao
传统的导航系统只会在检测到障碍后再规划绕行路径,这使得机器人在拥挤场景中显得“迟钝”——要么被动停下,要么频繁碰擦。Xiaomi EV 团队认为:真正的社交导航应当是预判而非反应。论文的创新点集中在对现有 Falcon 框架 的改进上,核心是引入了一个全新的 主动风险感知模块(Proactive Risk Perception Module),用于强化机器人在动态人群环境中的空间理解与安全避障能力。这一设计的核心意义在于:系统不再依赖稀疏的惩罚信号,而通过连续的风险反馈形成更平滑、更符合人类直觉的避让策略。这正是 Xiaomi EV 团队在比赛中能以极小分差夺得第二名的关键所在——机器人学会了“提前让路”。

任务建模与基础框架
论文首先将社会导航(Social Navigation)问题重新定义为一种带约束的路径规划任务。
机器人不仅要安全抵达目标点,还要在移动过程中遵守社交规则——不能太靠近人,也不能阻挡对方的行进路线。整个系统构建在 Falcon 框架 之上。该框架以摄像头的深度图像和目标位置作为输入,通过卷积神经网络提取视觉特征,再由循环神经网络(LSTM)学习时间上的变化趋势,输出机器人下一步的移动指令。在训练过程中,模型同时接收来自多种奖励信号的约束:
● 当机器人靠得太近时,会收到距离惩罚;
● 若与人或障碍发生接触,则触发碰撞惩罚;
● 若机器人阻碍了他人预计的路径,也会被施加额外惩罚。
这一设计让模型不仅追求到达目标,更学习“怎样更合适地前进”,体现了从几何避障向社会感知的转变。
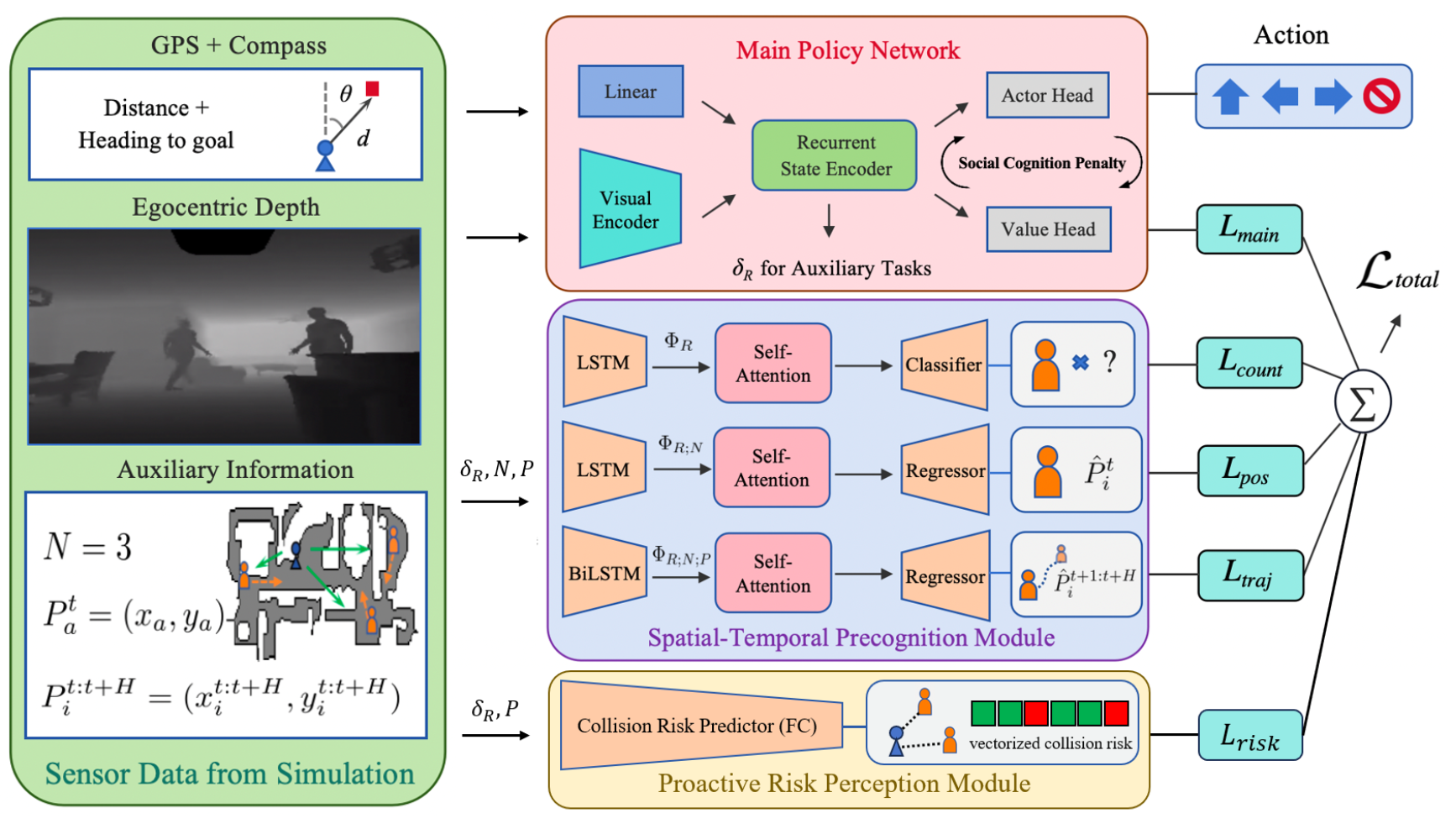
图2|方法总览:这张图概述了论文提出的方法。团队在 Falcon 框架的基础上新增了一个主动风险感知模块(Proactive Risk Perception Module),该模块与主策略网络并行运行,输入为深度图与定位信息(GPS + Compass)。策略网络在训练过程中受到社会认知惩罚(Social Cognition Penalties)的约束,输出特征同时送入 Falcon 的“时空前瞻模块(Spatial-Temporal Precognition Module)”与主动风险模块。风险模块会根据人与机器的距离预测潜在的碰撞风险,为每个附近行人生成一个连续风险值,并通过辅助损失信号(auxiliary loss)提升智能体的空间感知与避碰能力。简而言之,它让机器人在学习路径规划的同时,也学会“感受危险”
主动风险感知模块
在 Falcon 框架中,机器人虽然能预测行人的运动轨迹,但并不会明确区分“哪一种情况更危险”。换句话说,它能“看到人”,却难以“感受风险”。小米EV团队为此加入了一个新的组成部分——主动风险感知模块(Proactive Risk Perception Module)。这个模块的目标是,让机器人像人类驾驶者一样具备“提前预判危险”的直觉。它会根据机器人与周围人的相对距离、运动方向等信息,输出一个风险分值。这个分值越高,就意味着潜在碰撞的可能性越大。论文中将风险划分为三个等级:
● “危险区”,机器人必须立刻调整;
● “警戒区”,系统会逐步放缓速度;
● “安全区”,机器人可以保持原路线前进。
这种分层机制让导航过程更加自然,机器人不再等到“看到危险”才反应,而是在接近风险时已经主动调整了姿态与速度。更重要的是,这一模块在模型训练阶段扮演了“教练”的角色。它为主策略网络提供了连续、密集的学习信号,让机器人能更快、更稳定地学会在人群中保持安全与礼貌的行为。
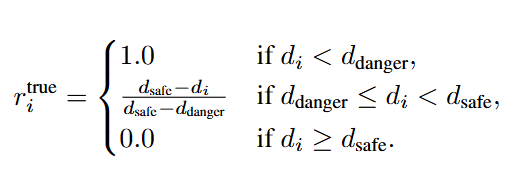
图3|论文中对于危险区域的划分公式:危险的得分从0开始逐渐增加到1,在论文中采用2m表示危险区的临界值,4m作为安全区距离的临界值
研究团队在 Social-HM3D 仿真环境中进行了大量训练与评测,该平台模拟了真实商场、走廊与广场等人群动态场景。
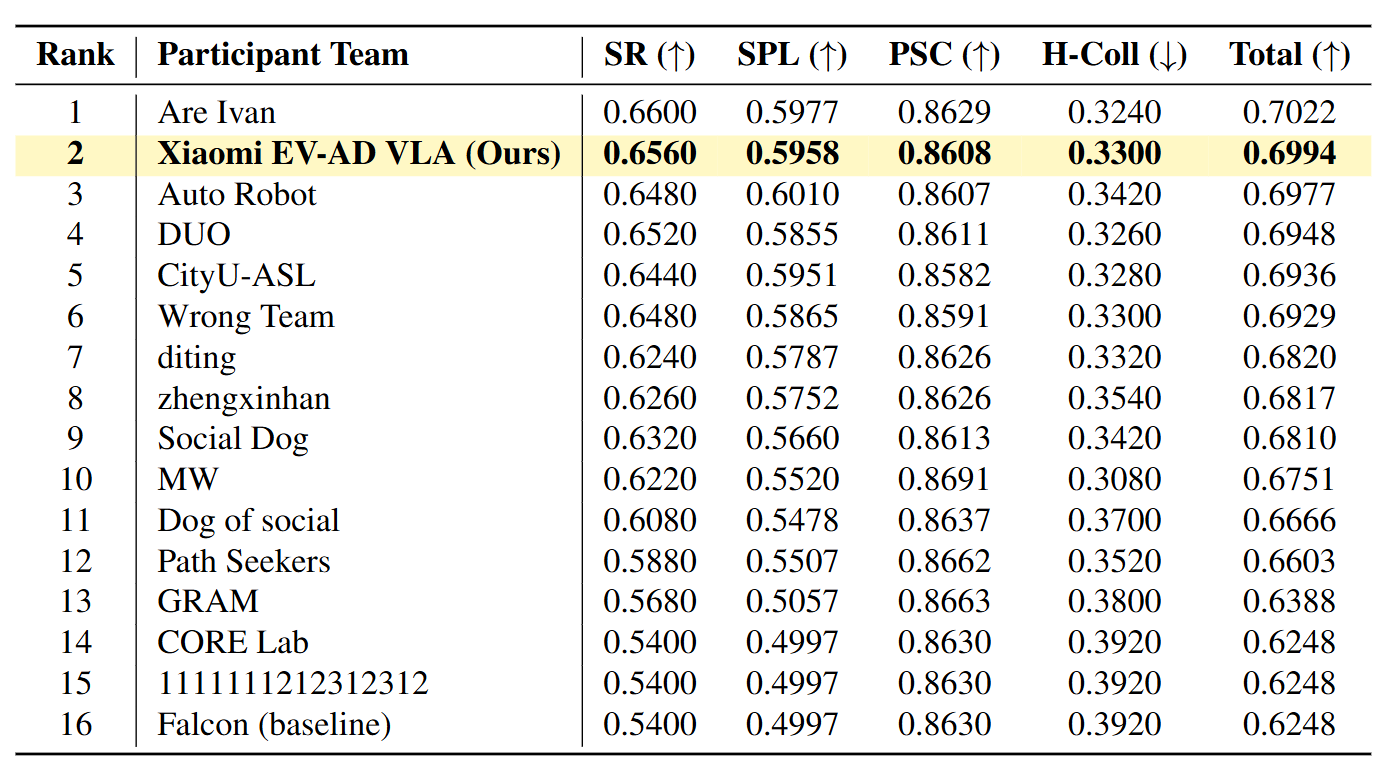
图4|表格展示了 IROS 2025 RoboSense Challenge 社会导航赛道的最终成绩。官方基线方法为 Falcon,我们的团队 Xiaomi EV-AD VLA 在 16 支参赛队伍中获得第 2 名,总得分为 0.6994,仅比冠军低 0.0028
在 RoboSense Challenge 的最终测试中,EV-AD VLA 以总分 0.6994 位列 16 支队伍中的第二名,尤其在“社交合规”评分上接近满分。可视化结果显示:当机器人进入狭窄通道时,
它会主动判断行人意图并停下等待;当两名行人对向而行时,它会选择轻微侧移避让——这正是“社会化导航”的关键标志。
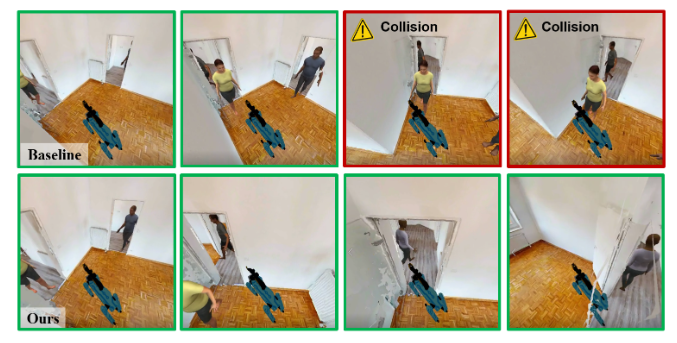
图5|这张图展示了一段典型任务的对比过程。与基线方法相比,EV-AD VLA 能准确预测行人轨迹,提前移动到一个不阻碍他人的安全位置,并主动避开潜在碰撞。绿色轨迹代表安全行为,红色轨迹表示与行人发生碰撞。从结果可以直观看出,系统具备“先思考、后行动”的特性,使导航过程更加平滑、自然,也更符合人类的社交直觉
这项研究展示了自动驾驶与具身智能的一个新方向:
安全不仅是避障,更是理解他人意图。主动风险感知让机器人具备了“情境意识”——它不再只是遵循几何规则,而是学会在社会空间中“读空气”。从无人车到服务机器人,从校园道路到商场大厅,这种具备社交理解的导航方式,将成为未来人机共处的基础。当机器人学会“让一让”,人类或许也会开始信任它们走进我们的生活空间。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









