



前言
2025年,顶级学术期刊《Nature》、《Science》及其子刊系列期刊所描绘的无人机前沿图景,正引领我们见证一场从“工具”到“智能体”的深刻蜕变。这一年的突破性进展,体现了研究者们在两个核心方向上的不懈求索:一是对飞行器本体物理潜能的极限压榨,二是对其作为系统节点交互边界的颠覆性拓展。在物理性能层面,通过对材料、微观结构和驱动方式的革命性创新,无人机正以前所未有的敏捷与坚韧挑战着动力学与环境的制约,无论是在昆虫尺度上复现生物亿万年进化而来的惊人杂技,还是在复杂未知环境中实现兼顾极致速度与绝对安全的高可靠导航,都标志着其单体能力的边界正在被彻底重塑。
与此同时,无人机作为独立个体的概念正在被打破,一个更加智能、协同且与人类深度融合的空中新生态已初现雏形。在算法与控制层面,通过将人工智能与物理模型深度耦合,研究者们不仅破解了大规模集群在无通信条件下的自组织协同难题,并通过异构无人机间的紧密物理协作突破了单体功能与荷载的瓶颈,更赋予了无人机在复杂动态场景下进行精细物理操作的能力。尤为重要的是,人与机器的关系正在被重新定义。传统的单向操控正让位于直观、沉浸式的双向交互,飞行器不再是冰冷的机械,而是成为了人类感知与行动能力的延伸。本次盘点的研究成果,正是这一宏大变革的缩影,它们共同勾勒出未来智能飞行器作为探索者、协作者乃至共生伙伴的无限可能。
1.Acrobatics at the insect scale: A durable, precise, and agile micro–aerial robot
发表期刊: Science Robotics
机构: Massachusetts Institute of Technology
作者:Suhan Kim, Yi-Hsuan Hsiao, Zhijian Ren, Jiashu Huang, Yufeng Chen
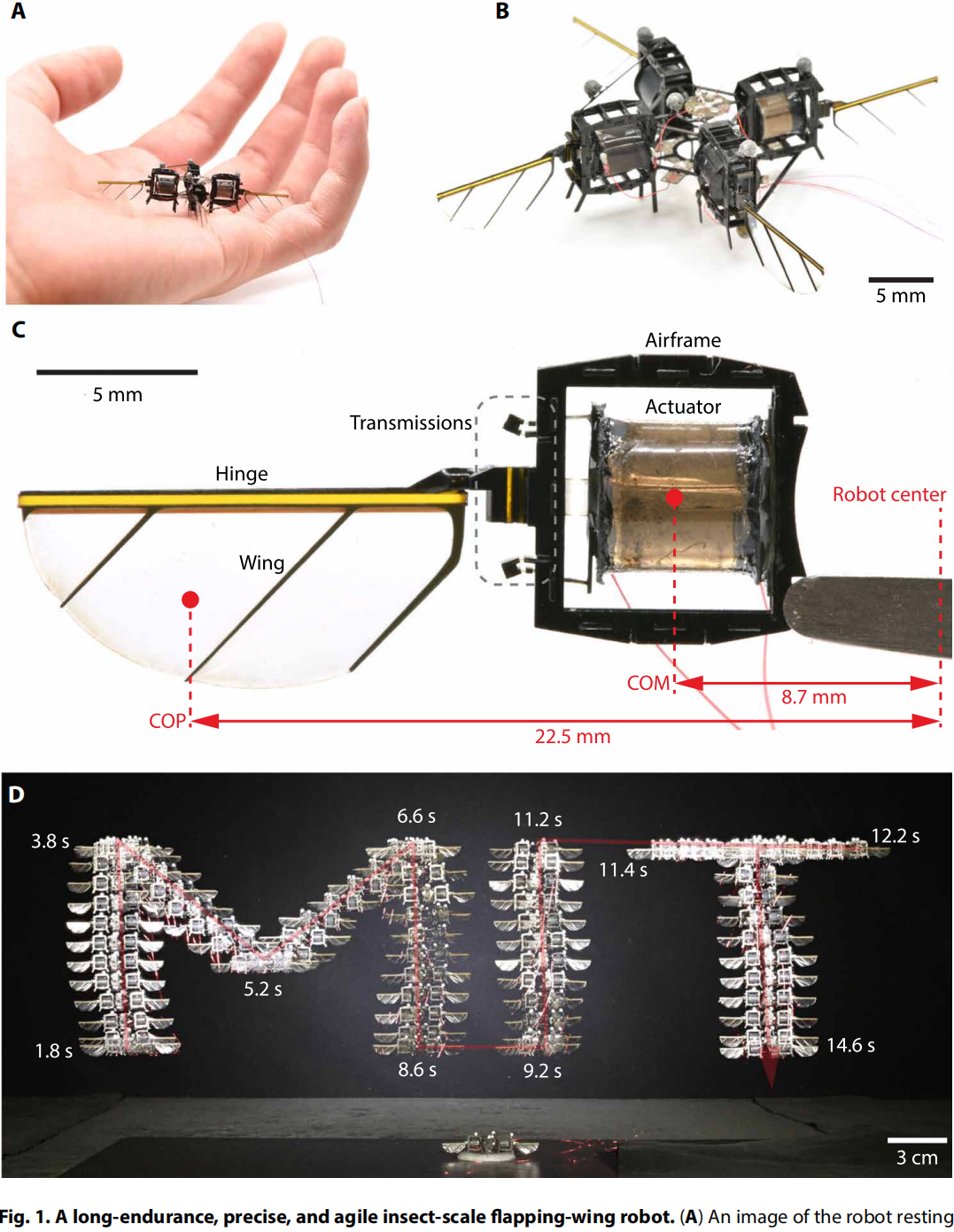
推荐理由: 该论文展示了一款在耐久性、精准度和敏捷性上取得巨大突破的昆虫级微型扑翼飞行机器人 。通过创新的机械结构设计,该机器人解决了此前同类机器人寿命极短(通常低于10秒)的核心难题 ,成功实现了长达1000秒的悬停飞行,比现有亚克级微型飞行器提升了两个数量级 。更重要的是,该机器人不仅能以亚厘米级的精度追踪复杂轨迹 ,还能完成如果蝇等空中昆虫般的高难度杂技动作,其双空翻的转动速率甚至超过了已知最快的飞行昆虫 。这项工作将仿生设计与工程解决方案深度融合,为微型机器人的实际应用和未来在传感、能源自主方面的研究开辟了新的可能性 。
论文内容:该论文介绍了一款重750毫克的四翼微型空中机器人,它在飞行续航、速度、精度和敏捷性方面均取得了显著提升 。研究人员发现,先前设计的亚克级MAV寿命短暂的主要原因是偏轴扭转应力导致传动和铰链结构疲劳失效 。为此,他们重新设计了机翼铰链,使其贯穿整个机翼前缘,并将传动系统进行优化以约束如同人造肌肉的介电弹性体致动器的偏轴变形 。这些设计将关键部件的应力降低了超过1000倍,从而极大地提升了机器人的耐用性和工作寿命 。该机器人的卓越性能通过一系列实验得到验证:在长续航测试中,机器人成功完成了1000秒的悬停飞行,总计飞行时间超过1550秒,期间未发生结构性损坏 。在轨迹跟踪任务中,机器人能以超过30厘米/秒的平均速度,沿着复杂的二维及三维路径(如“MIT”字母和旋转的无穷大符号)飞行,位置均方根误差低于1厘米 。最终,机器人还展示了惊人的杂技飞行能力,包括在0.11秒内完成一次完整的单体后空翻,以及在0.17秒内完成两次连续后空翻 。在双空翻过程中,其最大角速度超过 7200°/s,比果蝇快40%,是其他敏捷航拍机器人的四倍 。这项研究成功开发出一款性能媲美昆虫的微型飞行机器人,为未来执行授粉、群体协作等复杂任务奠定了基础 。
论文主页: https://www.science.org/doi/10.1126/scirobotics.adp4256
2.Unlocking aerobatic potential of quadcopters: Autonomous freestyle flight generation and execution
发表期刊: Science Robotics
机构: Zhejiang University
作者:Mingyang Wang, Qianhao Wang, Ze Wang, Yuman Gao, Jingping Wang, Can Cui, Yuan Li, Ziming Ding, Kaiwei Wang, Chao Xu, Fei Gao
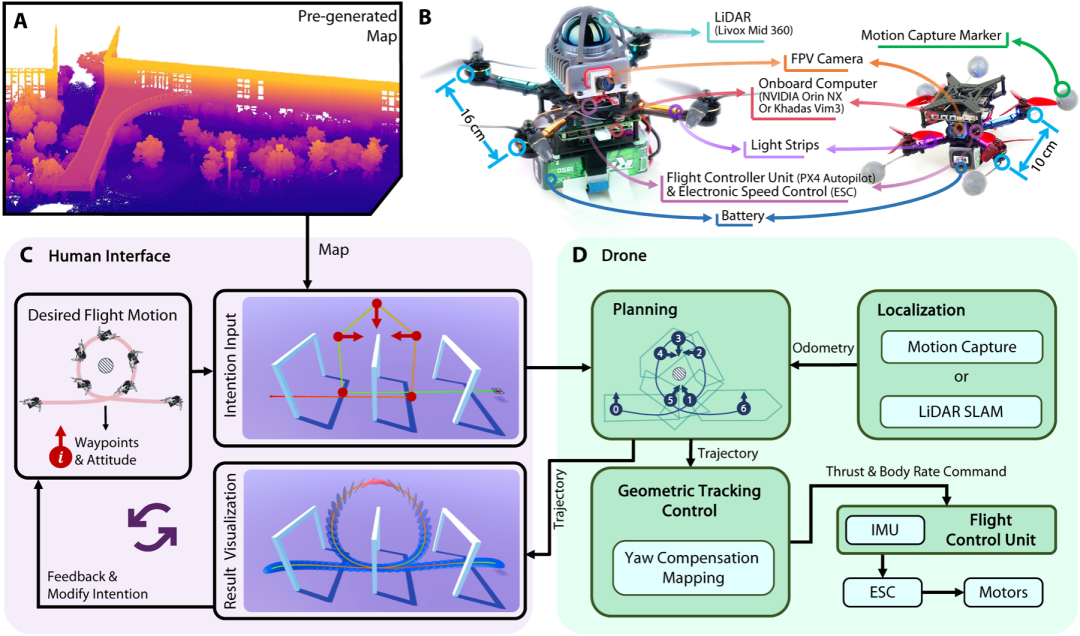
推荐理由: 这篇论文开创性地提出了一个完整的系统,使四旋翼无人机能够在遍布密集障碍物的复杂环境中,自主生成并执行专业飞手级别的复杂特技飞行动作。该研究通过引入一种全新的特技飞行意图通用表示方法,结合时空联合优化的轨迹规划器,不仅解决了特技飞行中任意姿态组合的难题,还巧妙地规避了差分平坦奇点导致的动力学问题。最终,通过在真实世界中与顶尖人类飞手的直接对比测试,该系统展现了卓越的稳定性与更高的成功率,将无人机的自主飞行能力推向了新的高度。
论文内容:作者提出了一个综合性系统,旨在解锁无人机的全部特技飞行潜力,使其能够像专业飞手一样,在复杂环境中自主完成高难度的自由式特技飞行。该系统的核心思想是将复杂的飞行动作分解为一系列离散的特技飞行意图,这些意图包含了空间拓扑结构和关键姿态变化两个核心要素,用户只需简单输入意图序列,系统便能自主生成兼具动态可行性、平滑性且能规避障碍的飞行轨迹。为实现这一目标,研究团队开发了一个时空联合优化的轨迹规划器,它能将用户意图、安全性和动力学可行性转化为一个数值优化问题进行高效求解。此外,论文深入分析并解决了特技飞行中特有的偏航敏感性问题,通过创新的偏航补偿映射策略,避免了因差分平坦奇点引起的数值不稳定和不必要的机体旋转。大量的仿真和真实世界实验验证了该系统的有效性,无人机成功完成了多种经典及组合特技动作,甚至在一系列连续穿越窄门的挑战中,其表现的稳定性和成功率均超越了专业级人类飞手。
论文主页: https://www.science.org/doi/10.1126/scirobotics.adp9905
3.Safety-assured high-speed navigation for MAVs
发表期刊: Science Robotics
机构: University of Hong Kong
作者:Yunfan Ren, Fangcheng Zhu, Guozheng Lu, Yixi Cai, Longji Yin, Fanze Kong, Jiarong Lin, Nan Chen, Fu Zhang
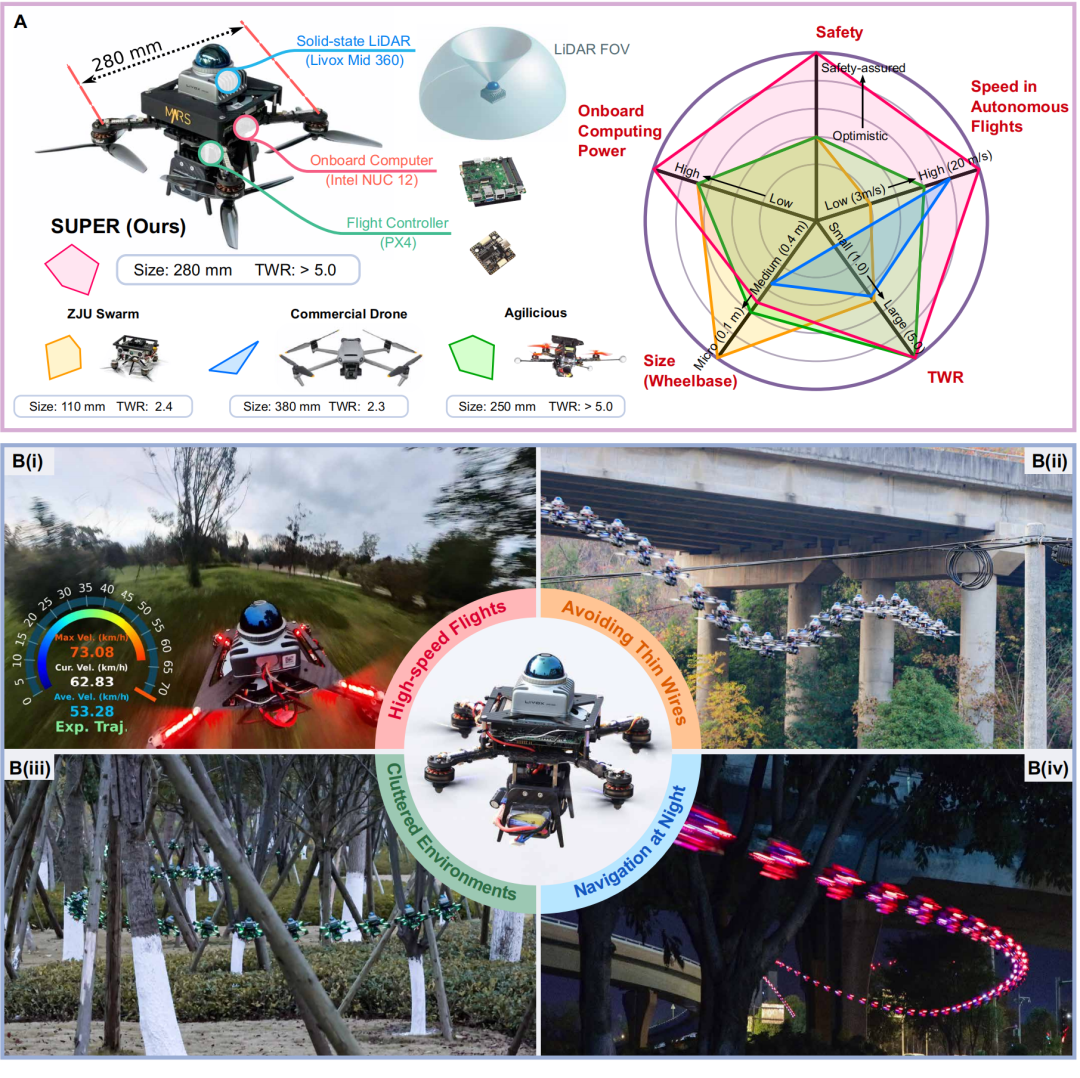
推荐理由: 论文展示了一套名为SUPER(safety-assured high-speed aerial robot)的完整自主微型飞行器(MAV)系统,该系统仅依靠机载传感与计算,在未知和杂乱的环境中实现了超过20米/秒的安全高速导航。通过将轻量化的高性能激光雷达(LIDAR)与创新的双轨制轨迹规划框架相结合,SUPER有效解决了高速飞行中的安全保障难题,其故障率相比基线方法降低了35.9倍。该研究成功演示了在真实世界中规避极细障碍物(如电线)、夜间飞行和穿越密集丛林等高难度任务,标志着高速自主无人机从实验室研究向现实世界应用迈出了里程碑式的一步。
论文内容:作者提出了一款名为SUPER的安全高速空中机器人,旨在解决微型飞行器在未知环境中实现高速自主飞行的系统性挑战 。 该系统集成了高推重比(大于5.0)的紧凑型机身与轻量化的三维激光雷达(LIDAR),以实现敏捷的机动性和远距离精确的障碍物感知能力 。 为同时保证飞行速度与安全性,研究人员设计了一种高效的规划框架,该框架直接利用LIDAR点云数据,在每个重新规划周期内生成两条轨迹:一条完全位于已知自由空间以确保安全,另一条则探索未知空间以最大化速度 。 通过对映射和轨迹优化模块的重新设计,该框架的计算效率得到极大提升 。 大量的真实世界测试验证了该系统的性能,SUPER成功地在森林等非结构化环境中以超过20米/秒的速度飞行,能够规避细小的树枝和电线,并在包括夜间在内的各种光照条件下保持稳健表现,展示了其在搜救、灾害响应等时间敏感型任务中的巨大应用潜力 。
论文主页: https://www.science.org/doi/10.1126/scirobotics.ado6187
4.Learning vision-based agile flight via differentiable physics
发表期刊:Nature Machine Intelligence
机构: Shanghai Jiao Tong University, University of Zurich
作者:Yuang Zhang , Yu Hu , Yunlong Song , Danping Zou , Weiyao Lin
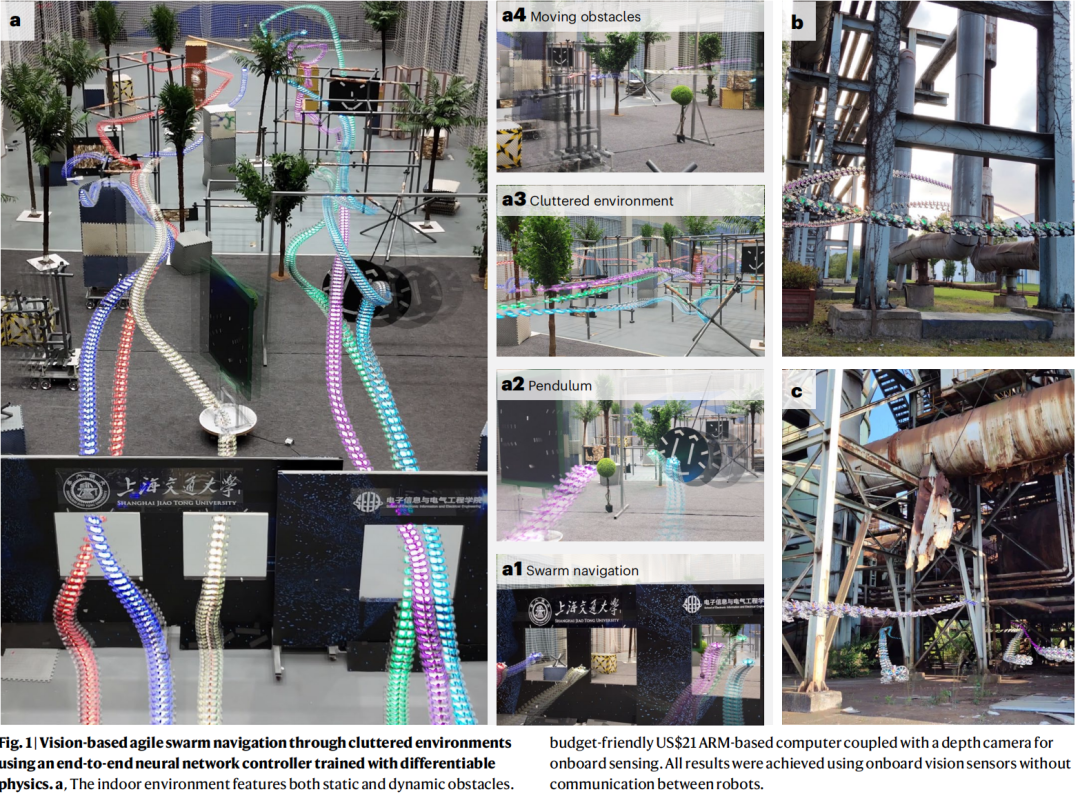
推荐理由: 论文首次提出了一种通过可微分物理仿真进行端到端训练的颠覆性方法,成功实现了无人机群在未知复杂环境中的高速敏捷飞行。该系统无需无人机之间的通信或中央规划,便可展现出等待、跟随、避碰等自组织群体智能行为。尤为突出的是,该成果在仅售21美元的超低成本计算平台(仅为现有方案成本的5%)上实现了高达20米/秒的飞行速度,是此前模仿学习方案的两倍,为资源受限环境下可大规模部署的廉价、高效无人机群应用树立了新的里程碑。
论文内容:作者提出了一种结合深度学习与第一性原理物理学的端到端学习框架,通过在可微分仿真器中反向传播损失梯度,直接优化神经网络控制策略,以解决无人机在未知、复杂环境中的敏捷导航难题 。该方法采用了一个简化的点质量物理模型进行训练,策略网络融合了卷积神经网络(CNN)和门控循环单元(GRU),仅利用机载深度相机和状态信息进行决策,实现了从感知到控制的无缝集成 。研究团队通过大量真实世界实验,在森林、公园及动态障碍物环境中验证了该方法的鲁棒性,单机飞行速度高达20米/秒 。在多智能体场景下,该系统实现了无需通信和全局规划的去中心化群体导航,展现了复杂的自组织协调行为 。此外,论文还证明了该系统可以在无里程计(即无外部速度和位置估计)的条件下稳定飞行,并与多种主流的传统及学习类方法进行了对比,在训练效率、成功率和泛化能力上均表现出显著优势 。
论文主页: https://www.nature.com/articles/s42256-025-01048-0
5.Proximal cooperative aerial manipulation with vertically stacked drones
发表期刊: Nature
机构: Westlake University, Loughborough University, Delft University of Technology
作者:Huazi Cao, Jiahao Shen, Yin Zhang, Zheng Fu, Cunjia Liu, Sihao Sun, Shiyu Zhao
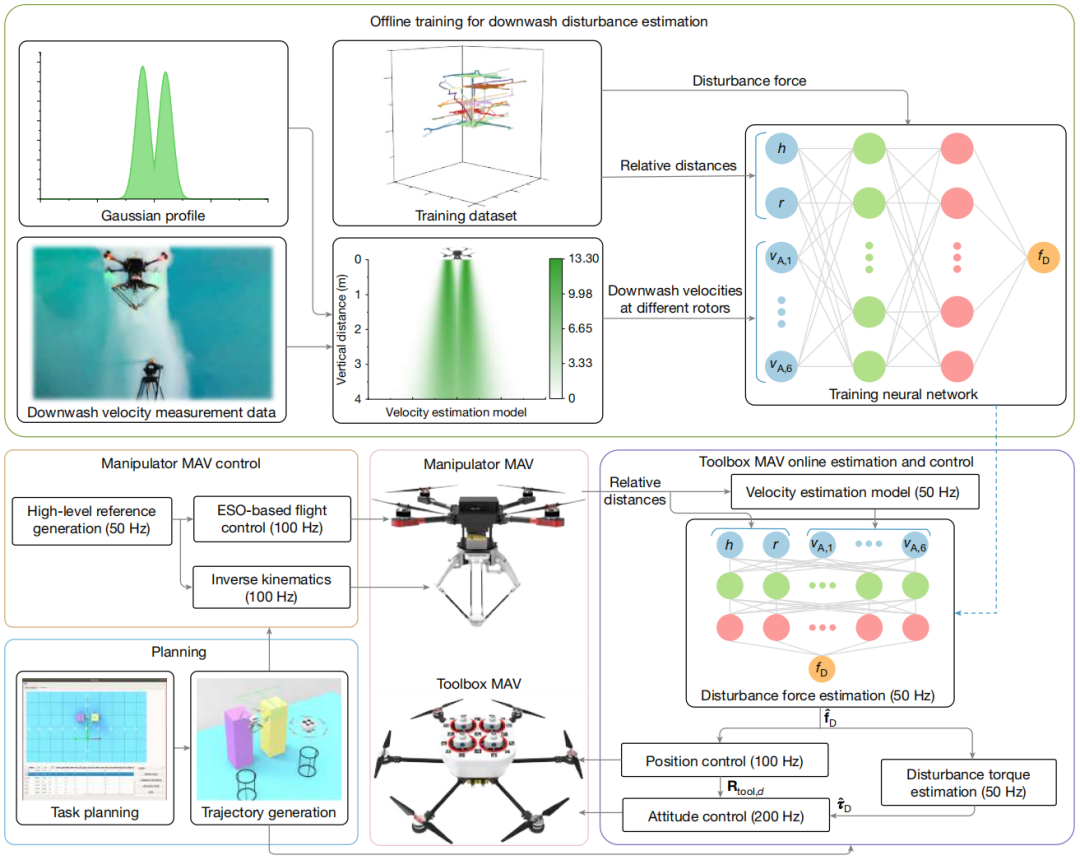
推荐理由: 论文首次提出一个名为“Flying Toolbox”的协同空中操作平台,成功攻克了多旋翼无人机在垂直近距离堆叠飞行中,因强烈下洗气流干扰而无法进行精确作业的重大技术难题。 [9, 10, 11] 通过将柔顺的对接机制、基于机器学习的气流扰动精准估计与补偿、以及高精度操控技术深度融合,该系统在高达13.18 m/s的下洗气流干扰下,实现了亚厘米级的空中对接精度。 [13] 这项工作解决了飞行邻近性与操作精确性之间的内在矛盾,为异构飞行机器人之间展开空中工具切换、电池更换、物料补给等复杂交互任务树立了新的标杆,极大地拓展了空中机器人的应用潜力。
论文内容:作者提出了一个名为“Flying Toolbox”的协同空中操作系统,该系统由一个携带多种工具的“工具箱无人机”(toolbox MAV)和一个配备了delta机械臂的“操作无人机”(manipulator MAV)组成。核心目标是让操作无人机能在工具箱无人机的正上方近距离飞行,并自主完成工具的取放与更换,以执行复杂的连续性任务。为解决垂直堆叠飞行时上方无人机产生的强烈下洗气流对下方无人机的严重干扰问题,研究团队设计了三大核心模块:一是集成了电磁铁和弹性系绳的柔顺对接机构,以确保在存在姿态误差和物理冲击时也能成功对接 ;二是基于高斯剖面和神经网络的下洗气流扰动估计与补偿方法,该方法能在线实时估计扰动力和力矩,并前馈到控制器中进行抵消 ;三是高精度的对接与操控技术,以满足亚厘米级的对接要求。实验结果表明,该系统在20次连续对接测试中实现了0.80 ± 0.33 cm的平均对接精度,并成功完成了自主切换剪刀和夹爪以剪断绳索、搬运物体的多阶段复杂任务,验证了该系统在强气动耦合干扰下的高精度、高鲁棒性和多功能性。
论文主页: https://www.nature.com/articles/s41586-025-09575-x
6.Slope inspection under dense vegetation using LiDAR-based quadrotors
发表期刊: Nature Communications
机构: The University of Hong Kong
作者:Wenyi Liu, Yunfan Ren, Rui Guo, Vickie W. W. Kong, Anthony S. P. Hung, Fangcheng Zhu, Yixi Cai, Huajie Wu, Yuying Zou, Fu Zhang
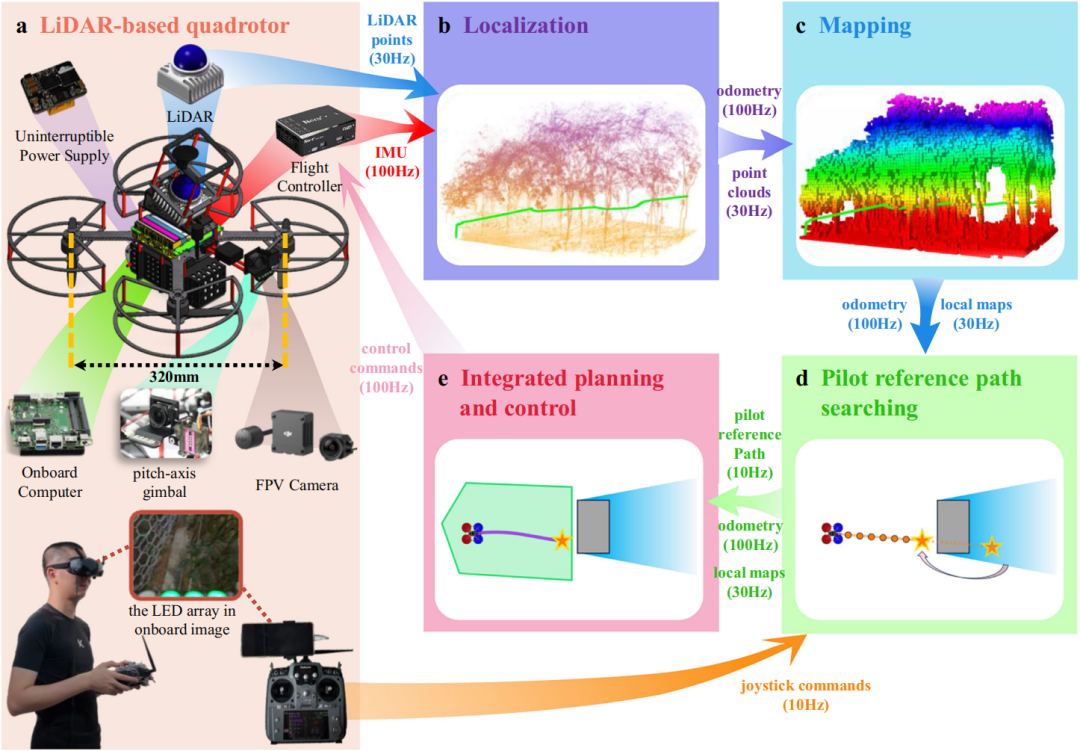
推荐理由: 论文首次提出并验证了一套完整应用于植被覆盖下的复杂斜坡巡检的激光雷达四旋翼无人机软硬件综合解决方案。针对传统人工巡检成本高、难度大,以及现有无人机方案在茂密植被下导航、避障能力不足的痛点 ,该研究通过将高精度激光雷达感知与鲁棒的定位、建图、规划和控制算法深度集成,实现了在狭窄、杂乱环境下对细小动态障碍物(如树枝和绳索)的敏捷规避。 通过与香港特区政府土木工程拓展署合作开展的多次真实场景实地测试,并与顶级商用无人机进行对比,该系统验证了其在危险和人员难以进入环境中执行巡检任务的实用性和卓越性能 ,为特种无人机从实验室走向实际应用设立了新的标杆。
论文内容:为解决山体滑坡防治工程中(如柔性拦石网)的巡检难题,研究人员开发了一款搭载激光雷达的四旋翼无人机系统,专门应对茂密植被覆盖下的陡峭斜坡环境。 该系统采用“人在回路”的操作模式,飞行员通过遥控器下达高级飞行方向指令,而无人机则利用其自主导航系统实时进行路径规划与障碍物规避,使操作员能专注于巡检任务本身。 系统的核心是一套综合性软件框架,包括用于GPS拒止环境下精确定位的激光雷达-惯性里程计(FAST-LIO2),一个能构建高分辨率地图并精确识别树枝等细小障碍物的建图模块(增强型ROG-Map),以及一个集成的规划与控制(IPC)模块,确保无人机能够敏捷响应并抵抗阵风等外部干扰。 研究团队在香港的六处真实斜坡上进行了实地部署测试,成功完成了对柔性拦石网的近距离视觉检查任务 ,并在与先进的商用无人机DJI Mavic 3的基准测试中,展示了其在感知和穿越复杂环境方面更强的鲁棒性和安全性。
论文主页:https://www.nature.com/articles/s41467-025-62801-y
7.Skin-interfaced multimodal sensing and tactile feedback system as enhanced human-machine interface for closed-loop drone control
发表期刊: Science Advances
机构: City University of Hong Kong, The University of Tokyo, University of Macau
作者:Chunki Yiu, Yiming Liu, Wooyoung Park, Jian Li, Xingcan Huang, Kuanming Yao, Yuyu Gao, Guangyao Zhao, Hongwei Chu, Jingkun Zhou, Dengfeng Li, Hu Li, Binbin Zhang, Lung Chow, Ya Huang, Qingsong Xu, Xinge Yu
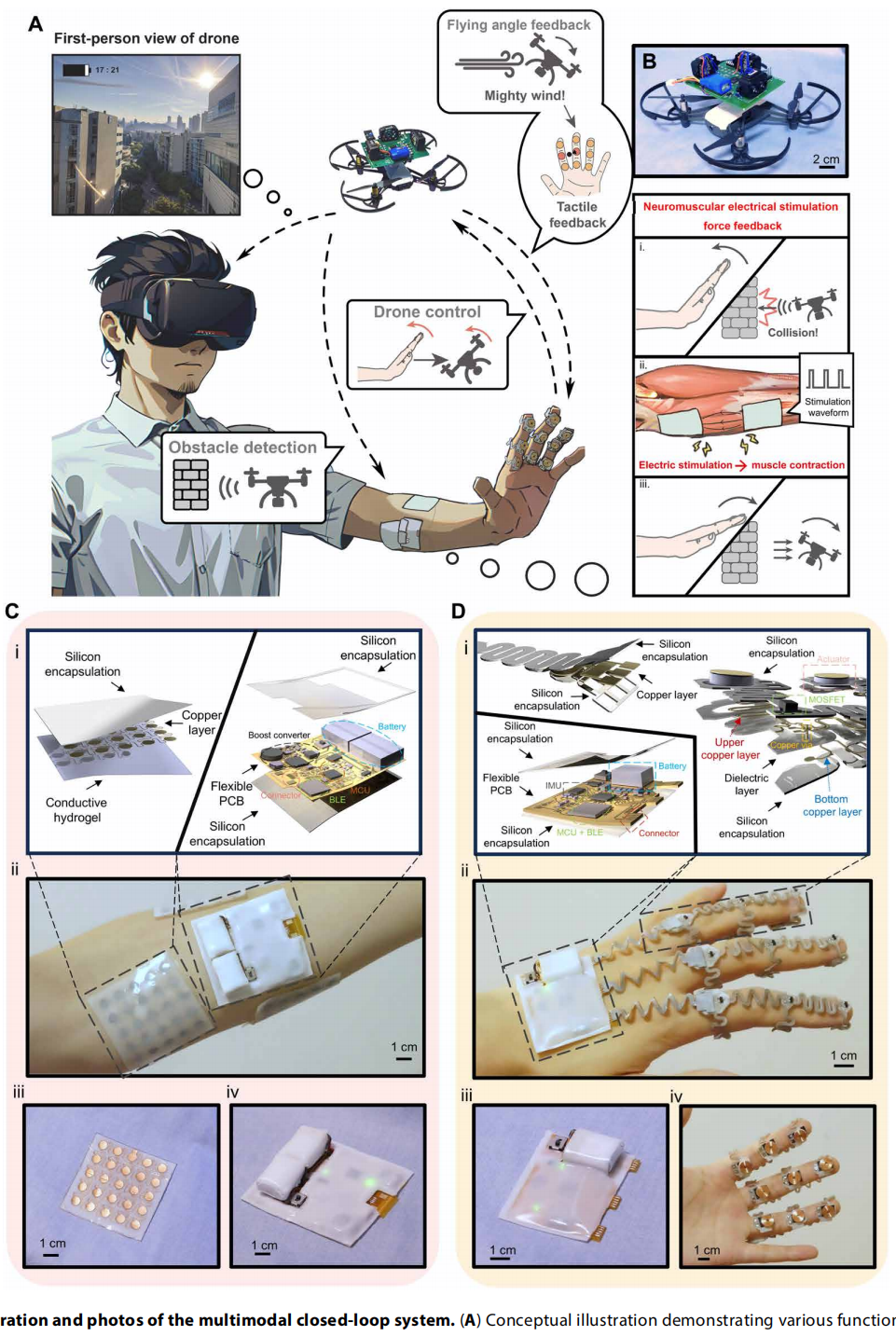
推荐理由: 该论文展示了一套基于皮肤集成多模态传感与反馈设备的增强型人机接口,实现了对无人机的闭环控制。 该系统通过捕捉手势实现直观、快速、精确的无人机操控 ,同时集成了将无人机姿态转化为二维触觉信息的反馈系统 和基于神经肌肉电刺激(NMES)的力反馈碰撞规避系统,显著提升了操作员的环境感知能力和飞行稳定性。 研究采用的可拉伸电子器件解决了传统控制设备笨重和佩戴舒适性的问题 ,为发展更强大的人机交互闭环系统开辟了新路径。
论文内容:作者提出了一套皮肤集成的增强型人机接口,用于无人机的闭环控制,旨在解决当前控制器复杂、训练周期长及反馈不足的问题。 该系统包含四大核心功能:由惯性测量单元(IMU)捕捉手部姿态以实现直观控制;一个3x3的微型振动执行器阵列提供二维触觉反馈,将无人机因气流等因素产生的姿态变化传递给操作员;一套基于神经肌肉电刺激(NMES)的力反馈系统,该系统与机载激光探测器联动,在检测到障碍物时通过刺激用户肌肉产生反向力,辅助用户下意识地修正飞行路径以规避碰撞;以及传统的第一人称视角(FPV)视觉反馈。整个系统采用薄、软、可拉伸的电子设计,保证了高度的可穿戴性和便携性。实验结果表明,该多模态闭环系统不仅能减少用户的认知负荷和训练时间,还能有效增强无人机在复杂气动环境下的飞行稳定性并成功规避视觉盲区内的静态及动态障碍物。
论文主页:https://www.science.org/doi/10.1126/sciadv.adt6041
8.A dexterous and compliant aerial continuum manipulator for cluttered and constrained environments
发表期刊: Nature Communications
机构: The University of Hong Kong
作者:Rui Peng, Yu Wang, Minghao Lu, Peng Lu
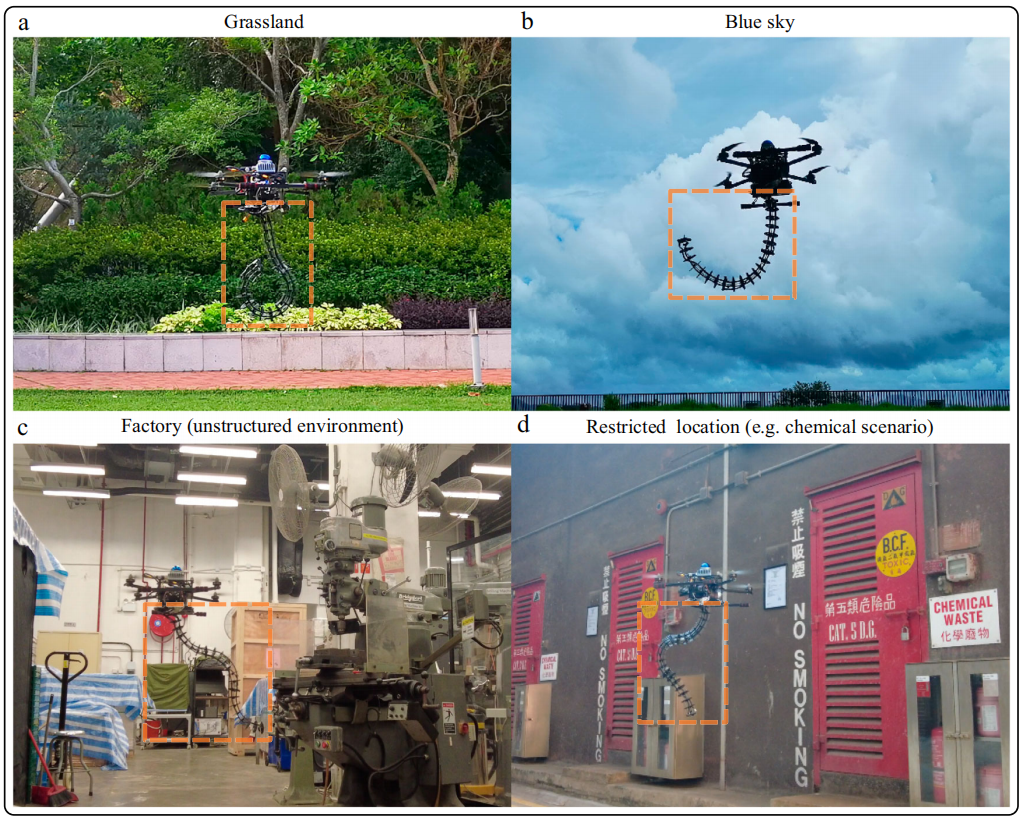
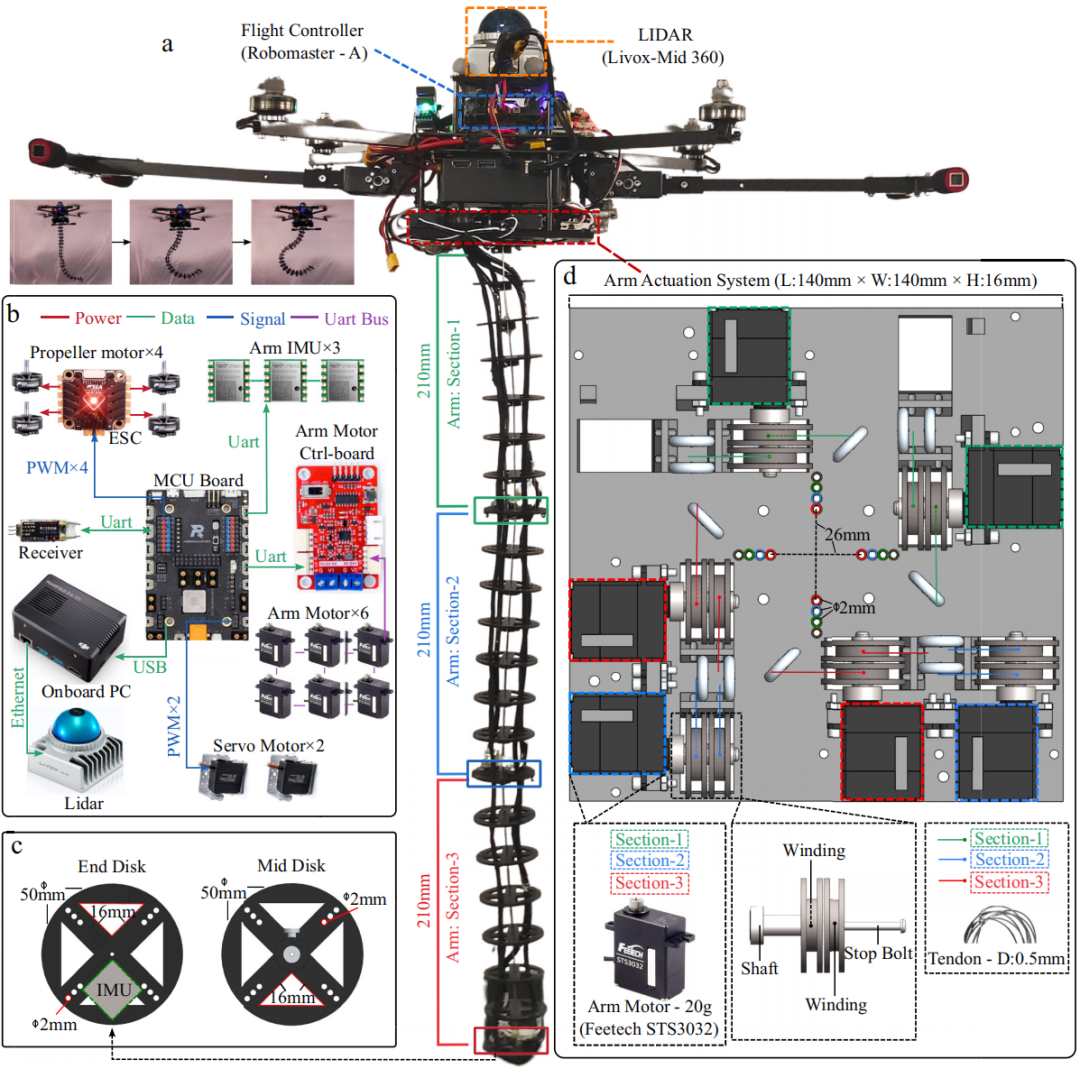
推荐理由: 论文提出了一种名为“空中象鼻”(Aerial Elephant Trunk, AET)的新型高柔顺性、高灵巧度空中连续体操控器,成功解决了传统刚性臂空中机器人普遍存在的灵巧度与有效载荷之间的矛盾。 通过将一个轻量化四旋翼无人机与一个灵巧的三段式连续体臂相结合,并为其设计了创新的紧凑型驱动系统,该系统显著降低了电机数量与机械臂惯性,同时有效防止了肌腱松弛问题。该研究通过大量真实世界的实验,验证了AET在管道、缝隙等狭窄受限空间中的卓越导航能力,以及对不规则形状物体的独特缠绕抓取能力,为空中机器人在复杂、非结构化环境下的实际应用(如高空检修、灾后搜救等)树立了新的技术标杆。
论文内容:该论文介绍了一款受象鼻启发的、名为AET的空中连续体操控器,旨在解决现有空中机械臂在复杂环境中操作的局限性。 该系统由一个小型四旋翼无人机平台和一个三段式、肌腱驱动的连续体机械臂构成,其核心创新之一是设计了一个高度紧凑的驱动系统,将所有电机水平集成于一个平面,并通过让每个电机驱动一对对角线肌腱的方式,将驱动三段臂所需的电机数量减至六个,有效减轻了系统重量并抑制了肌腱松弛。 研究团队为AET开发了一套完整的软硬件系统,包括无人机状态估计、基于分段常曲率的机械臂形状估计、逆运动学模型求解以及多层级的飞行与机械臂协同控制器 。 通过全面的实验验证,AET展示了其基础运动性能、模型精度以及在复杂任务中的卓越能力,例如成功穿越L形、C形和S形的弯曲管道,在有障碍物的狭窄缝隙和孔洞中完成抓取任务,并利用整个臂体缠绕并运输了多种不同重量、尺寸和形状的物体。 最后,论文还展示了基于全身运动规划的自主空中轨迹跟踪能力,成功完成了空中书写字母和穿越圆环等高级任务,证明了AET作为下一代空中作业平台的巨大潜力。
论文主页:https://www.nature.com/articles/s41467-024-55157-2
结语
综观2025年《Nature》与《Science》及其子刊系列期刊的无人机前沿研究,我们清晰地看到了一场从孤立飞行平台向多维智能交互体的深刻演进。无论是昆虫级机器人对敏捷与耐久极限的重新定义,还是自主系统在速度与安全之间达成的完美统一,都展现了对无人机本体潜能的极致挖掘。但更具革命性的是系统边界的拓展:无人机正从个体智能跃迁至群体与协同智能。从无需通信便能涌现复杂协作行为的自组织集群,到克服空气动力学挑战、实现近距离物理工具交换的异构团队,再到通过人机共融界面与仿生柔性臂将人类的感知与操作能力延伸至物理世界的每个角落——这些成果共同宣告了一个新范式的到来:无人机不再仅仅是空中的数据采集器,而是作为能够感知、协作、并与环境和人类进行深度物理交互的具身智能体,正在开启一个由高度自主、深度协同的空中机器人网络所构成的全新未来。

















 8324
8324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









