






RT-Thread-开发指南
■ RT-Thread-简介
■ keil5, Pack包下载
MDK 软件下载地址: https://www.keil.com/download/product,目前最新版本是 MDK5.36。
器件支持包下载地址: https://www.keil.com/dd2/pack,
添加链接描述
■ stm32开机过程
■ 上电复位
复位方式有三种:上电复位,硬件复位和软件复位。
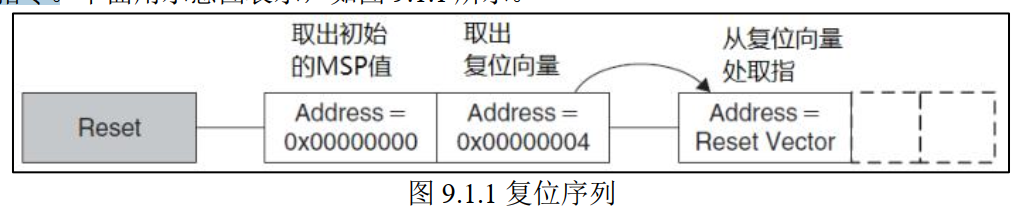
当产生复位,并且离开复位状态后, CM3 内核做的第一件事就是读取下列两个 32 位整数的值:
(1)从地址 0x0000 0000 处取出堆栈指针 MSP 的初始值,该值就是栈顶地址。
(2)从地址 0x0000 0004 处取出程序计数器指针 PC 的初始值,该值指向复位后执行的第
一条指令。
■ 地址重映射 (启动模式选择)
启动模式选择
内核是从 0x0000 0000 和 0x0000 0004 两个的地址获取堆栈指针 SP 和程序计数器指针 PC。
事实上, 0x0000 0000 和 0x0000 0004 两个的地址可以被重映射到其他的地址空间。
例如:我们将 0x0800 0000 映射到 0x0000 0000,即从内部 FLASH 启动,那么内核会从地址 0x0800 0000 处取出堆栈指针 MSP 的初始值,从地址 0x0800 0004 处取出程序计数器指针PC 的初始值。
CPU 会从 PC 寄存器指向的地址空间取出的第 1 条指令开始执行程序,就是开始执行复位中断服务程序 Reset_Handler。将 0x0000 0000 和 0x0000 0004 两个地址重映射到其他的地址空间,就是启动模式选择。
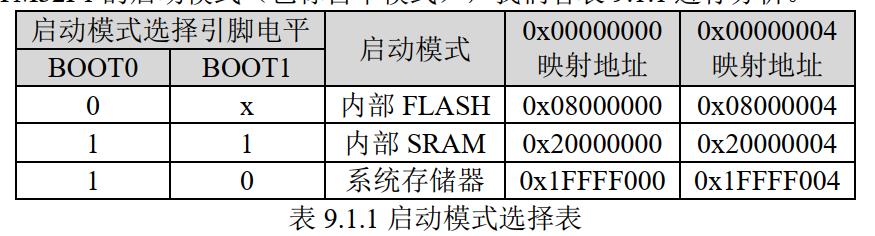
(1)内部 FLASH 启动方式
当芯片上电后采样到** BOOT0 引脚为低电平时**, 0x0000 0000 和 0x0000 0004 地址就被映射到内部 FLASH 的首地址 0x0800 0000 和 0x0800 0004。
FLASH 的 0x0800 0000 地址空间存储的内容,赋值给栈指针 MSP,作为栈顶地址,
FLASH 的 0x0800 0004 地址空间存储的内容,赋值给程序指针 PC,作为将要执行的第一条指令所在的地址。
完成这个操作后,内核就可以开始从 PC 指向的地址中读取指令执行了。
(2)内部 SRAM 启动方式
当芯片上电后采样到 BOOT0 和 BOOT1 引脚均为高电平时,地址0x0000 0000 和 0x0000 0004 被映射到内部 SRAM 的首地址 0x2000 0000 和 0x2000 0004,内核从 SRAM 空间获取内容进行自举。
在实际应用中,由启动文件 startup_stm32f103xe.s 决定了0x0000 0000 和 0x0000 0004 地址存储什么内容,链接时,由分散加载文件(sct)决定这些内容的绝对地址,即分配到内部 FLASH 还是内部 SRAM。
(3)系统存储器启动方式
当芯片上电后采样到 BOOT0=1 且 BOOT1=0 时,内核将从系统存储器的 0x1FFFF000 及0x1FFFF004 获取 MSP 及 PC 值进行自举。系统存储器是一段特殊的空间,用户不能访问, ST公司在芯片出厂前就在系统存储器中固化了一段代码。因而使用系统储存器启动方式时,内核会执行该代码,该代码运行时,会为 ISP(In System Program)提供支持,在 STM32F1 最常见的是检测 USART1 传输过来的信息,并根据这些信息更新自己内部 FLASH 的内容,达到升级产品应用程序的目的,因此这种启动方式也称为 ISP 启动方式。
■ mcu开机过程

■ 汇编指令





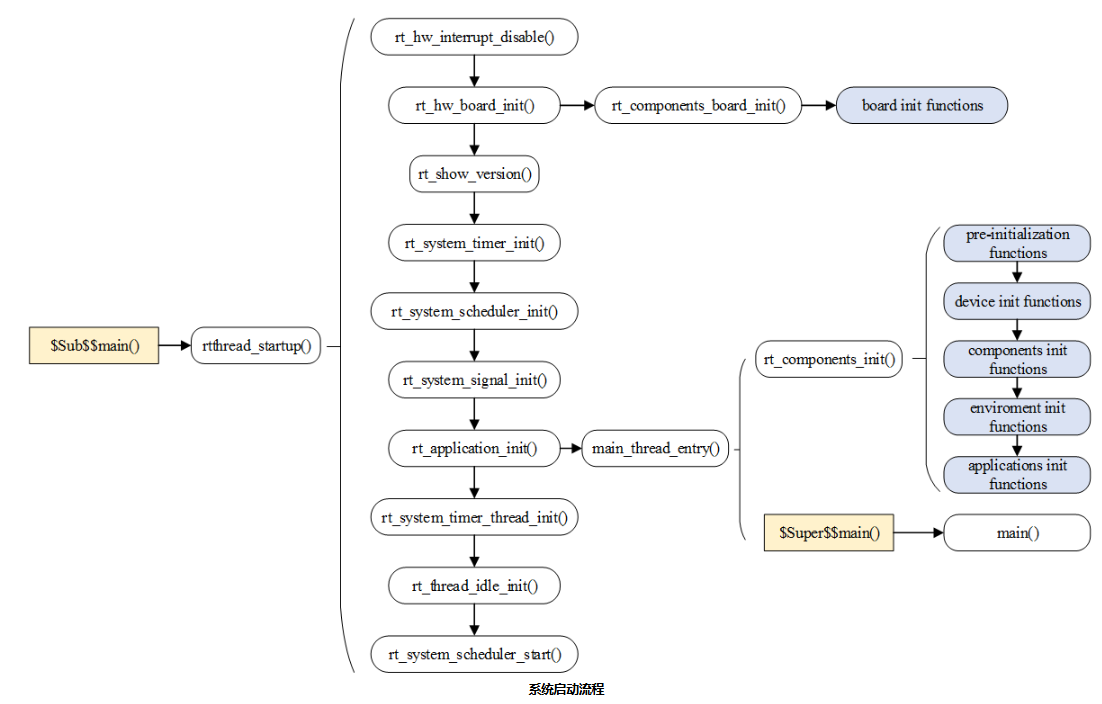
■ RT-Thread-初始化流程

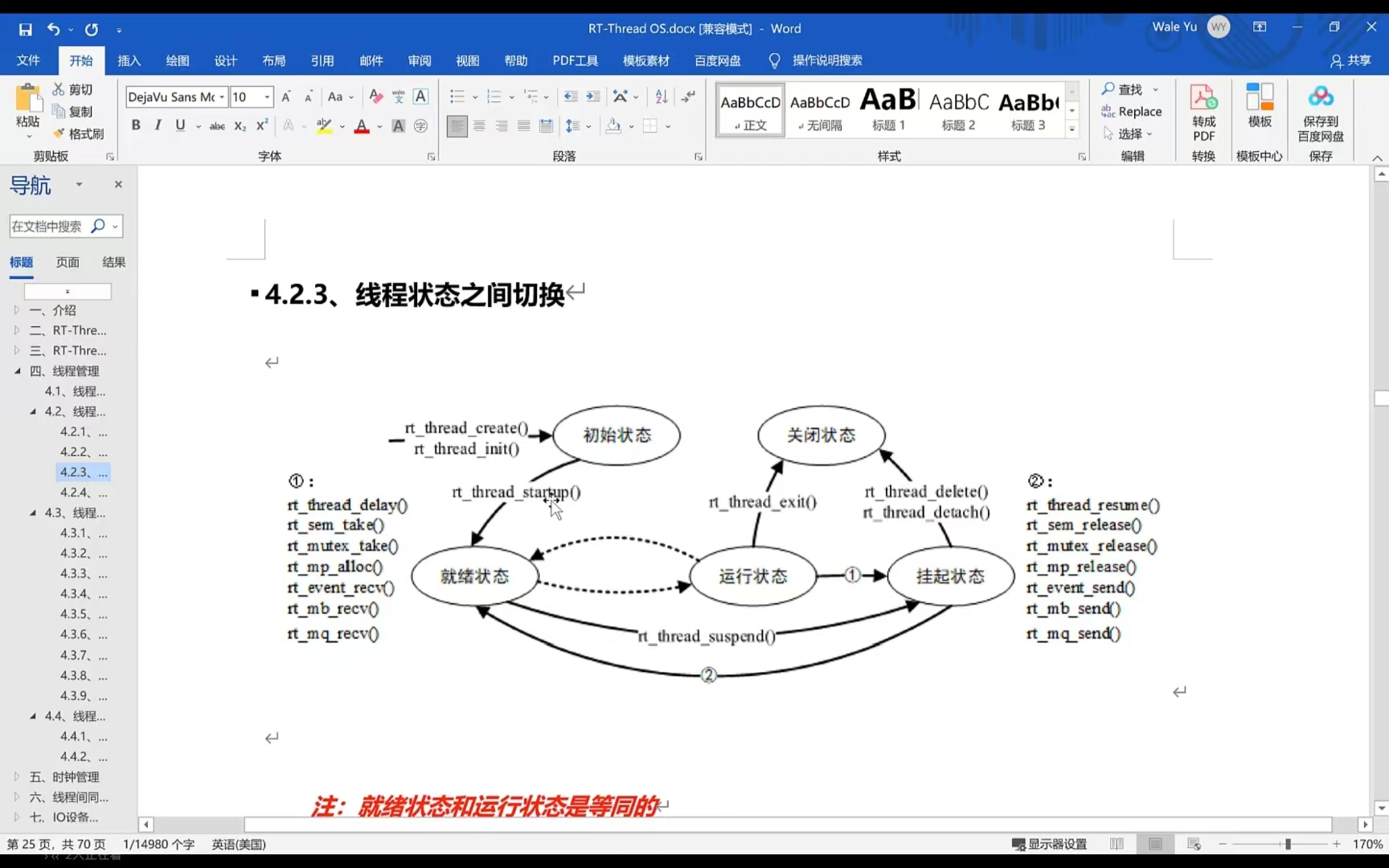
■ RT-Thread-线程状态切换
■ 基于 Keil MDK 移植 RT-Thread Nano
移植 Nano 的主要步骤:
- 准备一个基础的 keil MDK 工程. 可以编译通过运行。
- 获取 RT-Thread Nano pack 安装包并进行安装。
- 在基础工程中添加 RT-Thread Nano 源码。
- 适配 Nano,主要从 中断、时钟、内存这几个方面进行适配,实现移植。
- 验证移植结果:编写第一个应用代码,基于 RT-Thread Nano 闪烁 LED。
- 最后可对 Nano 进行配置:Nano 是可裁剪的,通过配置文件 rtconfig.h 实现对系统的裁剪。
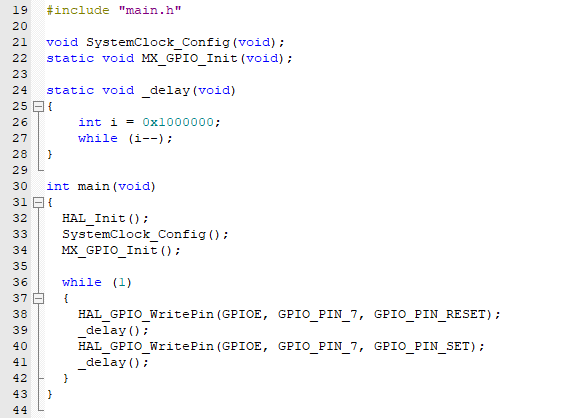
■ 步骤1:准备一份基础的裸机源码 如下就行。
■ 步骤2:Nano Pack 安装
Nano Pack 可以通过在 Keil MDK IDE 内进行安装,也可以手动安装。下面开始介绍两种安装方式。
■ 方法一:Keil MDK IDE 内进行安装
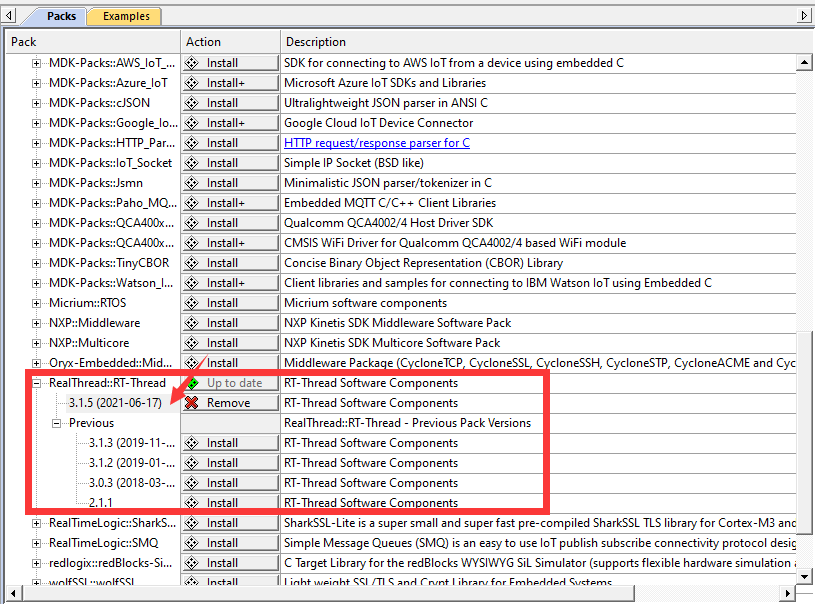
点击右侧的 Pack,展开 Generic,可以找到 RealThread::RT-Thread,点击 Action 栏对应的 Install ,就可以在线安装 Nano Pack 了。另外,如果需要安装其他版本,则需要展开 RealThread::RT-Thread,进行选择,箭头所指代表已经安装的版本。
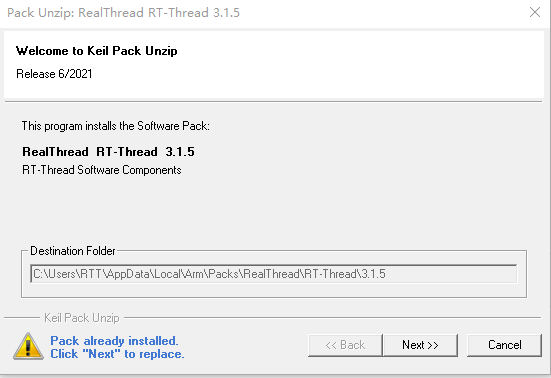
■ 方法二:手动安装
我们也可以从官网下载安装文件,RT-Thread Nano 离线安装包下载,下载结束后双击文件进行安装:
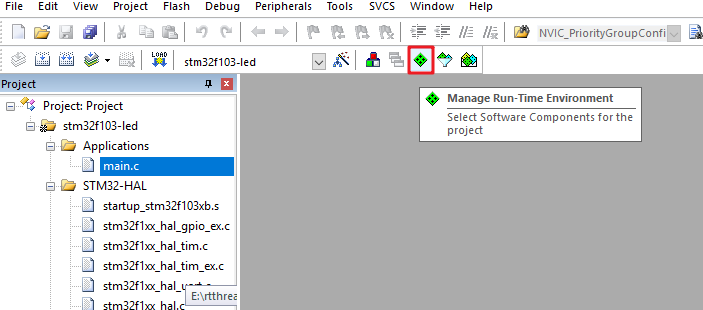
■ 步骤3:添加 RT-Thread Nano 到工程
打开已经准备好的可以运行的裸机程序,将 RT-Thread 添加到工程。如下图,点击 Manage Run-Time Environment。
在 Manage Rum-Time Environment 里 “Software Component” 栏找到 RTOS,Variant 栏选择 RT-Thread,然后勾选 kernel,点击 “OK” 就添加 RT-Thread 内核到工程了。
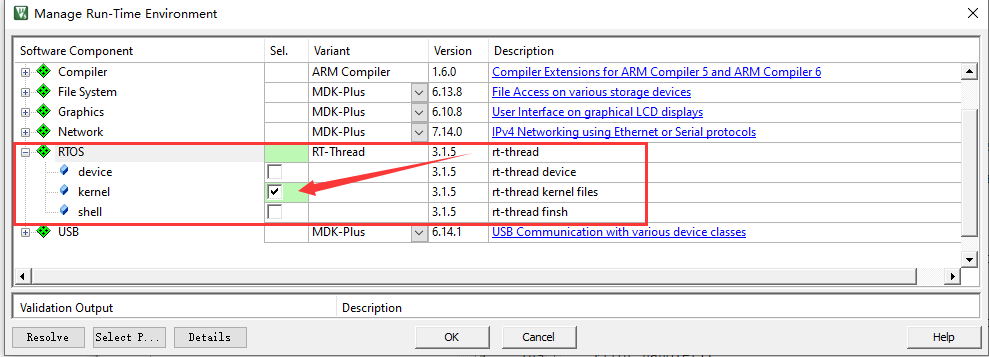
现在可以在 Project 看到 RT-Thread RTOS 已经添加进来了,展开 RTOS,可以看到添加到工程的文件:
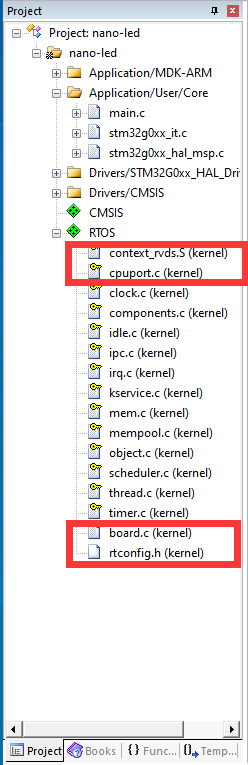
Cortex-M 芯片内核移植代码
context_rvds.s
cpuport.c
Kernel 文件包括:
clock.c
components.c
device.c
idle.c
ipc.c
irq.c
kservice.c
mem.c
mempool.c
object.c
scheduler.c
thread.c
timer.c
配置文件:
board.c
rtconfig.h
■ 步骤4:适配 RT-Thread Nano
==中断与异常处理 ==
HardFault_Handler() 和悬挂处理函数 PendSV_Handler() 这两个函数已由 RT-Thread 实现,所以需要删除工程里中断服务例程文件中的这两个函数,避免在编译时产生重复定义。
系统时钟配置
/* board.c */
/* timer 定时器中断服务函数调用 rt_os_tick_callback function,cortex-m 架构使用 SysTick_Handler() */
void rt_os_tick_callback(void)
{
rt_interrupt_enter(); /* 进入中断时必须调用 */
rt_tick_increase(); /* RT-Thread 系统时钟计数 */
rt_interrupt_leave(); /* 退出中断时必须调用 */
}
/* cortex-m 架构使用 SysTick_Handler() */
void SysTick_Handler()
{
rt_os_tick_callback();
}
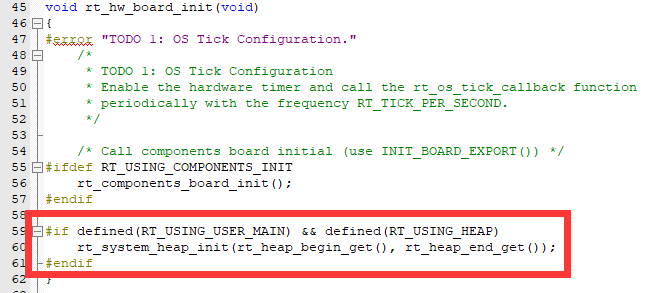
void rt_hw_board_init(void)
{
/*
* TODO 1: OS Tick Configuration
* Enable the hardware timer and call the rt_os_tick_callback function
* periodically with the frequency RT_TICK_PER_SECOND.
*/
/* 1、系统、时钟初始化 */
HAL_Init(); // 初始化 HAL 库
SystemClock_Config(); // 配置系统时钟
SystemCoreClockUpdate(); // 对系统时钟进行更新
/* 2、OS Tick 频率配置,RT_TICK_PER_SECOND = 1000 表示 1ms 触发一次中断 */
SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
内存堆初始化
系统内存堆的初始化在 board.c 中的 rt_hw_board_init() 函数中完成,内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,
RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。
开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用,如下所示:
初始化内存堆需要堆的起始地址与结束地址这两个参数,系统中默认使用数组作为 heap,并获取了 heap 的起始地址与结束地址,该数组大小可手动更改,如下所示:
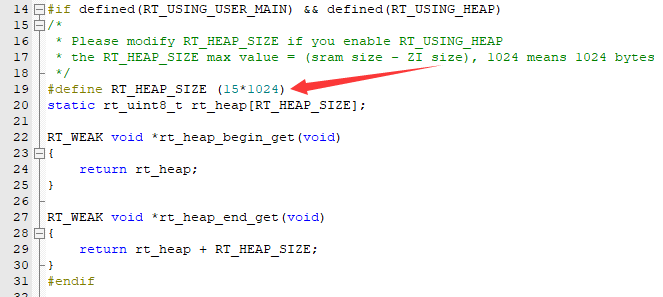
注意:开启 heap 动态内存功能后,heap 默认值较小,在使用的时候需要改大,否则可能会有申请内存失败或者创建线程失败的情况,修改方法有以下两种:
- 可以直接修改数组中定义的 RT_HEAP_SIZE 的大小,至少大于各个动态申请内存大小之和,但要小于芯片 RAM 总大小。
- 也可以参考 《RT-Thread Nano 移植原理》——实现动态内存堆 章节进行修改,使用 RAM ZI 段结尾处作为 HEAP 的起始地址,使用 RAM 的结尾地址作为 HEAP 的结尾地址,这是 heap 能设置的最大值的方法。
■ 步骤4:编写第一个应用
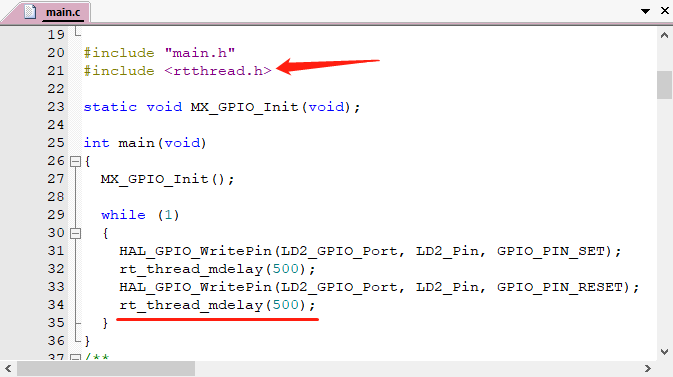
移植好 RT-Thread Nano 之后,则可以开始编写第一个应用代码验证移植结果。此时 main() 函数就转变成 RT-Thread 操作系统的一个线程,现在可以在 main() 函数中实现第一个应用:板载 LED 指示灯闪烁,这里直接基于裸机 LED 指示灯进行修改。
- 首先在文件首部增加 RT-Thread 的相关头文件 <rtthread.h> 。
- 在 main() 函数中(也就是在 main 线程中)实现 LED 闪烁代码:初始化 LED 引脚、在循环中点亮 / 熄灭 LED。
- 将延时函数替换为 RT-Thread 提供的延时函数 rt_thread_mdelay()。该函数会引起系统调度,切换到其他线程运行,体现了线程实时性的特点。
■ 在 RT-Thread Nano 上添加控制台与 FinSH
在 RT-Thread Nano 上添加控制台与 FinSH


















 1586
1586

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











