







文章目录
引言
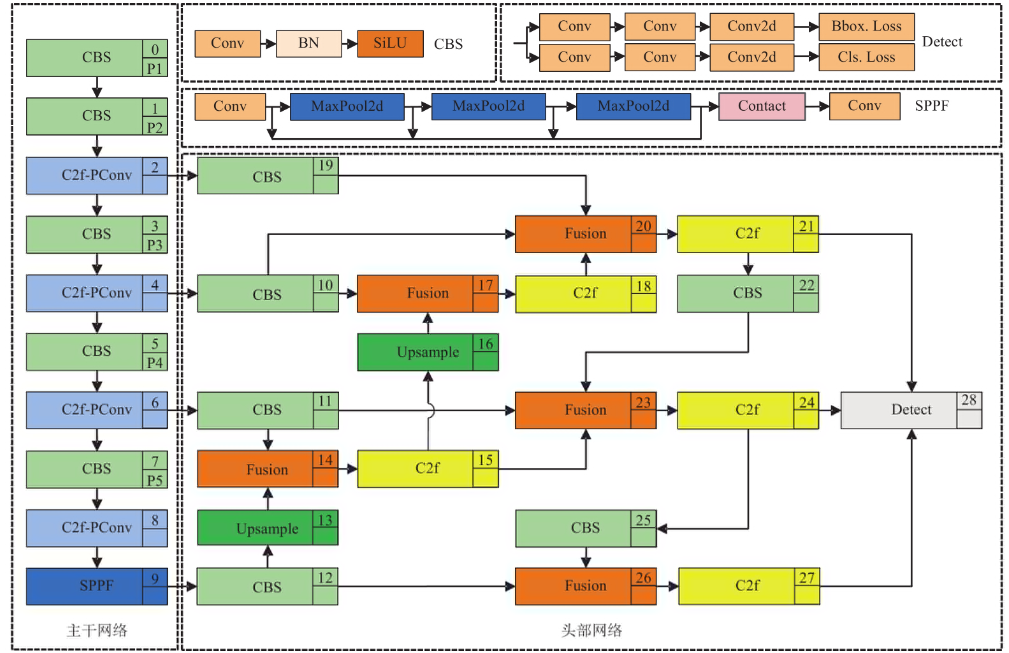
在目标检测领域,YOLO(You Only Look Once)系列算法因其高效性和准确性而备受关注。YOLOv8作为该系列的最新版本,继承了前代的优良特性,并在多个方面进行了优化。然而,为进一步提升其检测性能,特别是在处理不同尺度目标时的鲁棒性,研究者们不断探索新的改进方法。本文将介绍一种基于ASFF(Adaptive Spatial Feature Fusion)的YOLOv8检测头改进方案,通过引入自适应空间特征融合机制,增强模型对多尺度目标的检测能力。
ASFF原理
特征金字塔
ASFF首先构建一个特征金字塔,包含不同尺度的特征图。这些特征图通过下采样或上采样操作,使得它们具有相同的空间维度,为后续的特征融合做好准备。
import torch
import torch.nn as nn
import torch
 订阅专栏 解锁全文
订阅专栏 解锁全文

















 3550
3550

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









