







检测扩展板上的KEY1状态,控制蜂鸣器鸣笛。每按一次按键,蜂鸣器响一声。
配置引脚信息
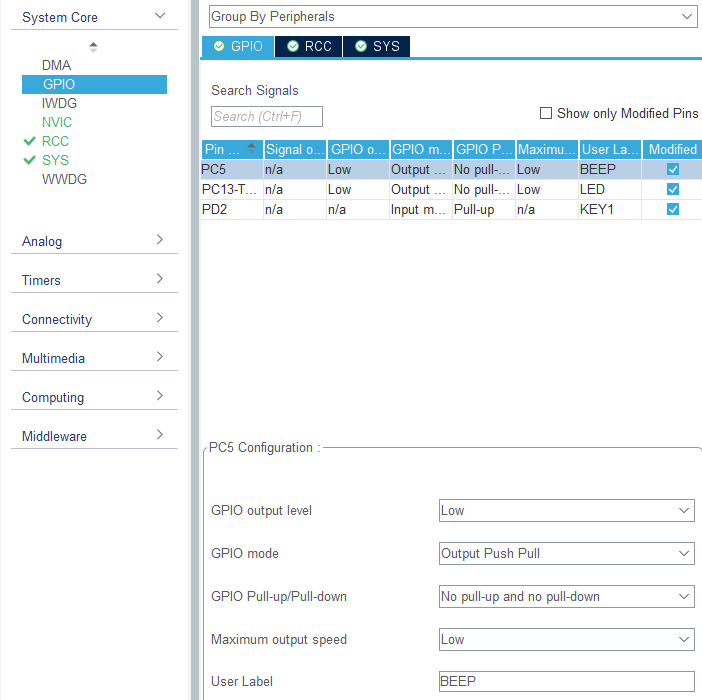
根据原理图可知:蜂鸣器的控制引脚连接的是STM32芯片的PC5引脚。需要将PC5设置为GPIO_Output模式,并且修改标签(Label)为BEEP,其他配置如下图所示。
![]()
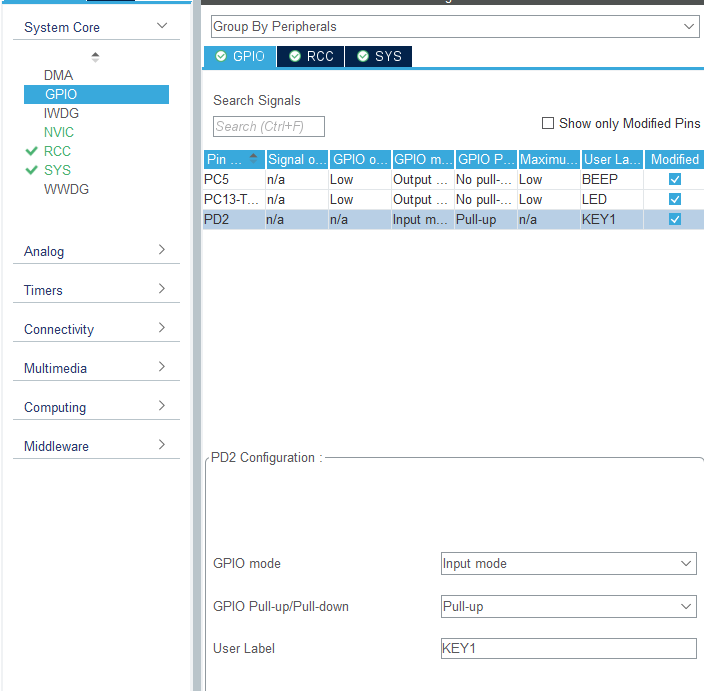
2.按键KEY1连接的是PD2引脚。需要将PD2设置为GPIO_Input模式,并且修改标签(Label)为KEY1,其他配置如下图所示。
![]()
保存并生成代码。
添加文件结构
通过图形化配置了引脚信息,生成的代码已经包含系统初始化内容,所以不需要额外再初始化系统配置。
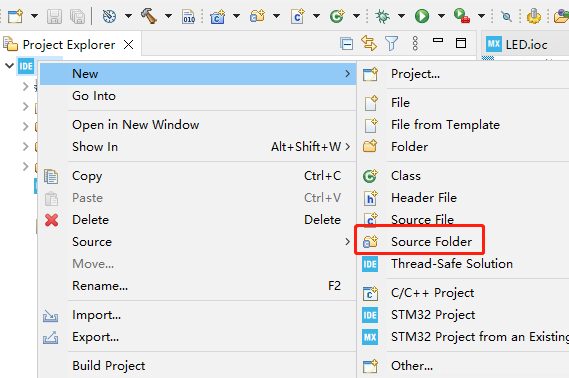
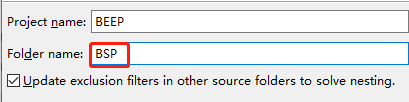
1.为了管理方便,我们新建一个BSP源码文件夹。在鼠标移动项目名称那里点击右键->New->Source Folder
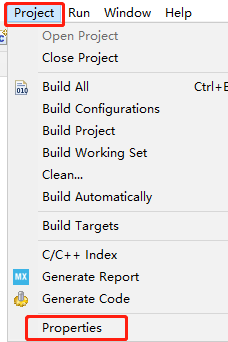
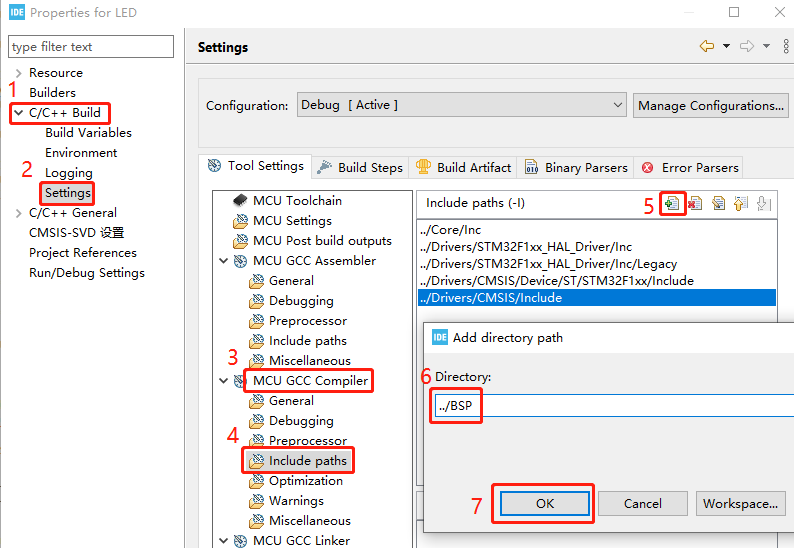
2.将BSP添加到环境中。点击Project->Properties->C/C++ Build->settings->MCU GCC Compiler->include paths,再点击添加按钮将../BSP填入并保存。
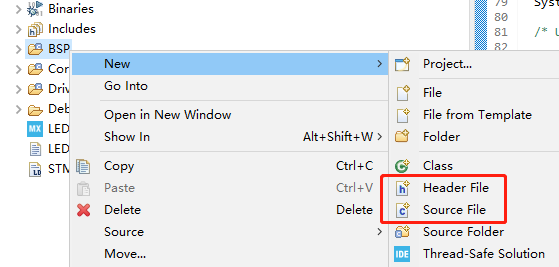
3.新建一个bsp.h和一个bsp.c文件,右键BSP->New->Header File/Source File,然后输入对应名称即可。
这两个文件主要负责链接main.c中的部分函数,可以避免重复写代码。
4.在bsp.h增加以下内容:将LED的控制做成宏定义的方式,简单快捷。新建Bsp_Init()函数主要负责初始化,Bsp_Loop()主要负责主程序内容。Bsp_Led_Show_State_Handle()函数主要负责LED指示灯闪烁效果,用于提示系统正在运行。
#ifndef __BSP_H__
#define __BSP_H__
/* Import HAL related library 导入HAL相关库 */
#include "main.h"
#include "gpio.h"
#include "stm32f1xx_hal.h"
#include "stm32f103xe.h"
/* Import device driver library 导入设备驱动库 */
#include "bsp_beep.h"
#include "bsp_key.h"
/* DEFINE */
#define LED_ON() HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, SET)
#define LED_OFF() HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, RESET)
#define LED_TOGGLE() HAL_GPIO_TogglePin(LED_GPIO_Port, LED_Pin)
/* functions */
void Bsp_Init(void);
void Bsp_Loop(void);
void Bsp_Led_Show_State_Handle(void);
#endif /* __BSP_H__ */
在main.c文件中导入bsp.h头文件。
在main函数中调用Bsp_Init()。
在while(1)中调用Bsp_Loop()。
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2022 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
Bsp_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
Bsp_Loop();
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
核心代码解释
在BSP中新建蜂鸣器的驱动库bsp_beep.h和bsp_beep.c文件。在bsp_beep.h中增加以下内容:
#ifndef __BSP_BEEP_H__
#define __BSP_BEEP_H__
#include "main.h"
#define BEEP_STATE_OFF 0
#define BEEP_STATE_ON_ALWAYS 1
#define BEEP_STATE_ON_DELAY 2
#define BEEP_ON() HAL_GPIO_WritePin(BEEP_GPIO_Port, BEEP_Pin, SET)
#define BEEP_OFF() HAL_GPIO_WritePin(BEEP_GPIO_Port, BEEP_Pin, RESET)
void Beep_Timeout_Close_Handle(void);
void Beep_On_Time(uint16_t time);
#endif
其中Beep_Timeout_Close_Handle()函数需要每10毫秒调用一次,这样才可以保证Beep_On_Time()函数设置时间后按照正常的效果进行。Beep_On_Time(time)中time表示蜂鸣器开启的时间,如果time=0,则关闭蜂鸣器,如果time=1则蜂鸣器一直响,如果time>=10,则蜂鸣器响time毫秒后自动关闭(time应是10的倍数)。
在BSP中新建蜂鸣器的驱动库bsp_key.h和bsp_key.c文件。在bsp_key.h中增加以下内容:
#ifndef __BSP_KEY_H__
#define __BSP_KEY_H__
#include "gpio.h"
#define KEY_PRESS 1
#define KEY_RELEASE 0
#define KEY_MODE_ONE_TIME 1
#define KEY_MODE_ALWAYS 0
uint8_t Key1_State(uint8_t mode);
#endif /* __BSP_KEY_H__ */
其中Key1_State(mode)函数的功能是检测按键是否被下,需要每10毫秒调用一次。mode可以输入0或者1,mode=0表示按下KEY1就一直返回KEY_PRESS,松开才返回KEY_RELEASE,mode=1表示不管按下KEY1多长时间,都只返回一次KEY_PRESS,其他情况都返回KEY_RELEASE。
在Bsp_Init()中添加开机蜂鸣器响50毫秒,在Bsp_Loop()检测按键是否被按下,如果按下则响50毫秒后自动关闭。最下方是LED灯和蜂鸣器的控制句柄,只需要每10毫秒调用一次就可以。
// bsp.c
#include "bsp.h"
// LED显示当前运行状态,每10毫秒调用一次,LED灯每200毫秒闪烁一次。
// The LED displays the current operating status, which is invoked every 10 milliseconds, and the LED blinks every 200 milliseconds.
void Bsp_Led_Show_State_Handle(void)
{
static uint8_t led_count = 0;
led_count++;
if (led_count > 20)
{
led_count = 0;
LED_TOGGLE();
}
}
// The peripheral device is initialized 外设设备初始化
void Bsp_Init(void)
{
Beep_On_Time(50);
}
// main.c中循环调用此函数,避免多次修改main.c文件。
// This function is called in a loop in main.c to avoid multiple modifications to the main.c file
void Bsp_Loop(void)
{
// Detect button down events 检测按键按下事件
if (Key1_State(KEY_MODE_ONE_TIME))
{
Beep_On_Time(50);
}
Bsp_Led_Show_State_Handle();
// The buzzer automatically shuts down when times out 蜂鸣器超时自动关闭
Beep_Timeout_Close_Handle();
HAL_Delay(10);
}
//bsp_beep.c
#include "bsp_beep.h"
#include "bsp.h"
uint16_t beep_on_time = 0;
uint8_t beep_state = 0;
// 刷新蜂鸣器打开的时间
// Refreshes the buzzer time
static void Beep_Set_Time(uint16_t time)
{
beep_on_time = time;
}
// 获取当前蜂鸣器打开的剩余时间
// Gets the remaining time of the current buzzer on
static uint16_t Beep_Get_Time(void)
{
return beep_on_time;
}
// 刷新蜂鸣器的状态
// Refreshes the buzzer status
static void Beep_Set_State(uint8_t state)
{
beep_state = state;
}
// 获取蜂鸣器的状态
// Gets the status of the buzzer
static uint8_t Beep_Get_State(void)
{
return beep_state;
}
// 设置蜂鸣器开启时间,time=0时关闭,time=1时一直响,time>=10,延迟xx毫秒后自动关闭
// Set the buzzer start time. The buzzer is disabled when time is 0, keeps ringing when time is 1, and automatically shuts down after time>=10
void Beep_On_Time(uint16_t time)
{
if (time == BEEP_STATE_ON_ALWAYS)
{
Beep_Set_State(BEEP_STATE_ON_ALWAYS);
Beep_Set_Time(0);
BEEP_ON();
}
else if (time == BEEP_STATE_OFF)
{
Beep_Set_State(BEEP_STATE_OFF);
Beep_Set_Time(0);
BEEP_OFF();
}
else
{
if (time >= 10)
{
Beep_Set_State(BEEP_STATE_ON_DELAY);
Beep_Set_Time(time / 10);
BEEP_ON();
}
}
}
// 蜂鸣器超时自动关闭程序, 10毫秒调用一次
// Buzzer timeout automatically shut down the program, 10 milliseconds to call once
void Beep_Timeout_Close_Handle(void)
{
if (Beep_Get_State() == BEEP_STATE_ON_DELAY)
{
if (Beep_Get_Time())
{
beep_on_time--;
}
else
{
BEEP_OFF();
Beep_Set_State(BEEP_STATE_OFF);
}
}
}
//bsp_key.c
#include "bsp_key.h"
#include "bsp.h"
// 判断按键是否被按下,按下返回KEY_PRESS,松开返回KEY_RELEASE
// Determine if the key is pressed, press to return KEY_PRESS, release to return KEY_RELEASE
static uint8_t Key1_is_Press(void)
{
if (!HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin))
{
return KEY_PRESS; // 如果按键被按下,则返回KEY_PRESS
}
return KEY_RELEASE; // 如果按键是松开状态,则返回KEY_RELEASE
}
// 读取按键K1的状态,按下返回KEY_PRESS,松开返回KEY_RELEASE.
// mode:设置模式,0:按下一直返回KEY_PRESS;1:按下只返回一次KEY_PRESS
// Read the state of key K1, press down to return KEY_PRESS, release to return key_release.
// mode: setting mode, 0: press down to return KEY_PRESS; 1: KEY_PRESS is returned only once
uint8_t Key1_State(uint8_t mode)
{
static uint16_t key1_state = 0;
if (Key1_is_Press() == KEY_PRESS)
{
if (key1_state < (mode + 1) * 2)
{
key1_state++;
}
}
else
{
key1_state = 0;
}
if (key1_state == 2)
{
return KEY_PRESS;
}
return KEY_RELEASE;
}
/*********************************************END OF FILE**********************/
烧录程序后,开机时蜂鸣器会先响50毫秒,LED灯每隔200毫秒闪一次,每按一次按键,蜂鸣器都会响50毫秒。


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









