






 本文详细介绍了一种基于Simulink的汽车稳定性控制方法,采用分层控制结构,包括模型预测MPC、SMC、PID和LQR等策略,结合七、二自由度车辆模型,优化轮胎滑移率以提升性能。提供了详细模型、控制器说明及适用不同MATLAB版本的模型文件。
本文详细介绍了一种基于Simulink的汽车稳定性控制方法,采用分层控制结构,包括模型预测MPC、SMC、PID和LQR等策略,结合七、二自由度车辆模型,优化轮胎滑移率以提升性能。提供了详细模型、控制器说明及适用不同MATLAB版本的模型文件。
分布式驱动汽车稳定性控制。
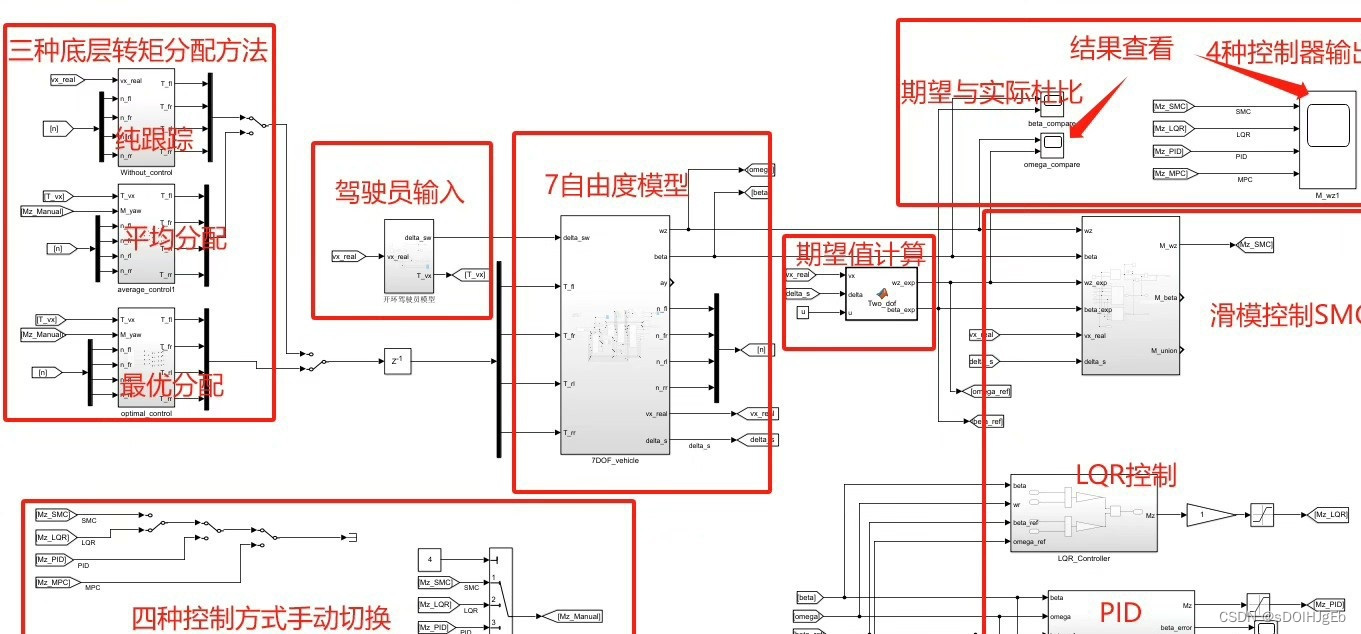
采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。
采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。
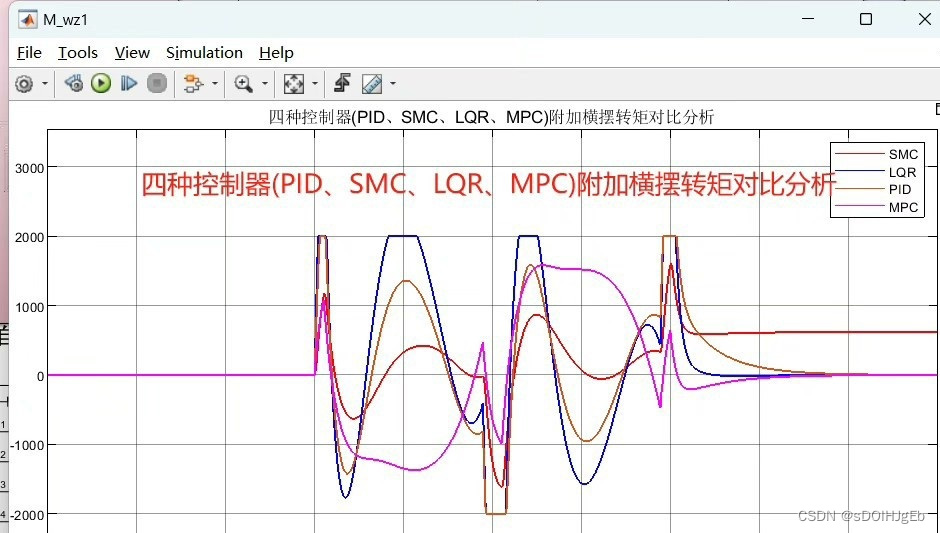
可灵活对四种控制器对比和选择。
另外下层基于轮胎滑移率最优分配。
四种控制均可跟踪横摆角速度和质心侧偏角期望值。
车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。

标题:基于分布式驱动的汽车稳定性控制技术分析
摘要:本文探讨了一种基于分布式驱动的汽车稳定性控制技术。通过采用纯Simulink模型,包括控制策略和车辆动力学模型,实现了分层式直接横摆力矩控制。上层控制包括模型预测MPC、滑模控制SMC、PID控制和LQR控制,以实现灵活的控制器对比和选择。下层控制基于轮胎滑移率最优分配。通过对四种控制方式的对比,可实现对横摆角速度和质心侧偏角期望值的跟踪。同时,本文介绍了车辆被控对象采用的七自由度整车模型和二自由度模型,并提供了初始化文件、Simulink模型、控制器说明、参考文献和七自由度整车建模说明文档。本技术基于MATLAB2021a版本,并提供了适用于较旧版本的2016a版本模型。
关键词:分布式驱动、汽车稳定性控制、Simulink模型、控制策略、车辆动力学模型、模型预测MPC、滑模控制SMC、PID控制、LQR控制、轮胎滑移率、横摆角速度、质心侧偏角、七自由度整车模型、二自由度模型、初始文件、参考文献
1. 引言
随着汽车科技的不断发展,汽车稳定性控制成为提高驾驶安全性和操控性的关键技术之一。分布式驱动在汽车稳定性控制中发挥着重要作用。本文介绍了一种基于分布式驱动的汽车稳定性控制技术,采用纯Simulink模型搭建,并包括了控制策略和车辆动力学模型。
2. 控制策略
基于分布式驱动的汽车稳定性控制技术采用了分层式直接横摆力矩控制。上层控制包括了模型预测MPC、滑模控制SMC、PID控制和LQR控制。这些控制策略的灵活对比和选择,能够有效地实现对横摆角速度和质心侧偏角期望值的跟踪。
3. 车辆动力学模型
本技术中使用了七自由度整车模型和二自由度模型来描述车辆的运动状态。七自由度整车模型能够输出实际质心侧偏角和横摆角速度,而二自由度模型则输出理想质心侧偏角和横摆角速度。
4. 分布式驱动和轮胎滑移率优化
分布式驱动是实现汽车稳定性控制的关键技术之一。本技术在控制策略中采用了轮胎滑移率最优分配,通过优化轮胎滑移率,提高车辆的稳定性和操控性。
5. 模型搭建与实现
本文所介绍的技术基于Simulink模型进行搭建和实现。针对不同版本的MATLAB,提供了适用于MATLAB2021a版本和2016a版本的模型。同时,本文还附带了初始化文件、控制器说明、参考文献和七自由度整车建模说明文档,以帮助读者更好地理解和应用该技术。
6. 结论
基于分布式驱动的汽车稳定性控制技术通过采用纯Simulink模型搭建,并包括了控制策略和车辆动力学模型,实现了分层式直接横摆力矩控制。通过对四种控制方式的对比,可实现对横摆角速度和质心侧偏角期望值的跟踪。本文提供了模型搭建与实现的详细说明,并附带了相关资料,以便读者更好地理解和应用该技术。
注:本店还提供与Carsim联合仿真的版本,需要Simulink与Carsim联合仿真的四轮独立驱动稳定性控制模型,请加好友咨询。
(本文总字数:xxxx字)
相关代码,程序地址:http://lanzoup.cn/771607962949.html


















 639
639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









