



德国自动驾驶市场发展
摘要
本文提出了一种用于预测自动驾驶汽车在客运领域市场渗透率的模型,重点关注无方向盘的自动驾驶出租车。为此,构建并评估了一个离散系统动力学模型,其输入参数来源于文献和一项调查。该调查共收集了873名参与者的用户需求数据。结果显示,性别、年龄、工作状况、城市规模和月收入对自动驾驶技术的信任以及使用自动驾驶出租车的意愿具有影响。相反,受访者的教育程度以及家庭中成人或儿童的数量则未发现有显著影响。
结果表明,在本研究范围(至2040年的时间范围)内,大多数自动驾驶车辆将是私人拥有并配备方向盘的。预计这类车辆将达到1240万辆。与此同时,自动驾驶出租车将进入市场,预计主要为不可操控(无方向盘)类型,到2038年达到最大值240万辆。这一最大值主要取决于对技术的信任以及人们因成本或使用方式因素而放弃自有汽车的意愿。由于平均每辆自动驾驶出租车服务更多人,车辆总数预计从目前的4510万辆下降到2040年的约4170万辆。此外,主要通过出租车和公共交通出行的人口比例预计将从目前的20.0%上升至2040年的约32%。届时,大约19%的人将至少偶尔使用自动驾驶出租车。最后,随着人们从公共交通转向自动驾驶出租车,行驶里程预计将增加25%。
1. 引言
目前,汽车行业正在经历一场重大变革,这主要是由于电动和混合动力驱动、共享出行、个人出行、联网车辆和自动驾驶的大规模引入。消费者的行为也在发生变化,表现为年轻驾驶员数量减少(E‐mobil, 2015;Beck, 2016)以及将汽车视为交通工具而非地位象征的趋势(AutoScout,2015)。相应地,汽车共享模式的使用日益增加(Friedel, 2014),而优步、Lyft、滴滴出行、Grab和 Ola等出行服务提供商(Johnson, 2017)也实现了快速增长。
然而,最大的社会变革将源于自动驾驶的发展。最初,它将是传统汽车的一项功能,驾驶员仍对车辆拥有控制权;但随着不可控自动驾驶出租车(ATs)的引入,这项技术将很快对日常生活产生关键影响。目前,自动驾驶汽车(AVs)的法律框架仍不明确。
是指“驾驶员有义务监控和控制车辆系统采取的任何行动”(联合国, 2016年)。为了进一步推动自动驾驶的发展,汽车工业需要在国家层面以及国际层面获得法律确定性。为确保这种确定性,德国政府于2016年4月启动了扩大自动驾驶法律基础的计划(Auto Bild, 2016年)。
事实上,自动驾驶具有多项优势:用户在出行期间可以工作(Le Vine 等,2015),可以与朋友交谈而不会分散对交通的注意力(瓦莱,2013),并节省出行时间(舒特尔和西瓦克,2014)。此外,儿童或无驾驶执照的人将能够在无需成人协助的情况下使用汽车(瓦莱,2013)。另外,预计自动驾驶汽车(AVs)将对交通流稳定性与通行能力产生积极影响(Talebpour 和 Mahmassani, 2016)。当人们放弃私家车并转向使用自动驾驶出租车时,还将带来进一步的优势。除了可能的成本优势以及无需为寻找合适停车位而烦恼外,自动驾驶出租车还可实现自动加油,并通过智能车辆更换,在长途旅行中推动电动驾驶的突破。
该技术的扩散率不仅取决于经常讨论的技术市场成熟度(Muoio,2016)和责任问题(Vetter,2016)。人口中存在对新技术的各种阻力,这些阻力各不相同,例如对技术的信任、主动驾驶汽车的愿望或财务疑虑。
本文通过一项包含873名参与者的调查分析了这些阻力,并将其作为离散系统动力学模型的参数,以预测自动驾驶车辆的市场发展。首先,建立了一个无反馈的模型简化版本进行预测。然后,增加了额外的依赖关系,通过敏感性分析研究模型的动态特性。这揭示了自动驾驶汽车成功实现市场渗透的关键参数。此外,还分析了四个附加情景及其输出。
所有结果均根据六种交通方式(TA)的使用方式(私人或共享)及其自动化水平进行区分,如表1所示。
此处,交通方式1和2描述了当前技术水平。在交通方式3和4中,由于自动驾驶仪可以随时关闭,车辆的基本使用方式没有改变。然而,在交通方式5和6中,用户会受到明显影响,因为他们无法亲自驾驶汽车。在交通方式2、4和6中,对日常生活的影响主要体现在人们不再拥有汽车。由于这些替代方案满足不同的用户期望,因此本研究必须对它们全部予以考虑。
据我们所知,本文提出的预测模型是唯一能够区分这六种交通方式替代方案的模型。因此,该模型的构建与评估是本文的首个贡献。其他贡献包括调查结果以及通过敏感性分析得到的结果,这些结果揭示了自动驾驶出租车成功引入的关键因素。
本文结构如下:首先,在第2节中展示文献调查,接着是第3节中的计算模型,以及第4节中的调查及其结果。然后,在第5和第6 节中展示了预测模型的结果和敏感性分析,最后在第7节中得出结论。
2. 文献综述
下文简要概述了关于预测自动驾驶汽车数量的文献,以及针对公众对自动驾驶意见和关注的调查。
2.1. 自动驾驶汽车预测
关于自动驾驶汽车市场渗透率的预测,相关研究较少。大部分研究由咨询公司进行,主要针对美国的情况。根据利特曼(2014, 2018)和比尔斯泰特等人(2014)的研究,预计到2035年私人四级车辆占比至少达到25%,或到2040年达到30%。长期预测显示, 2050年(IHS Automotive,2014年)、2055年(尚卡尔等人,2013年)和2060年(罗威,2015年)之后将接近或达到100%。班萨尔和科克尔曼(2017)给出了一个中间值预测,即到2045年市场渗透率为24.8–87.2%,具体取决于四级技术价格。
这些研究主要考察了交通方式3,相关数据将用于确定我们模型中的参数。
纽文惠森等人(2018)提出了一种非常复杂的模型,用于模拟自动驾驶汽车的市场渗透率。由于该模型的敏感性相对较高, 2040年四级车辆的百分比在1.2%至29%之间变化(此外五级车辆的百分比更高)。他们的模型非常适合研究市场渗透过程中的影响,但由于输出变量对输入参数的变化反应强烈,很难倾向于支持其中某一种情景。因此,该研究并未给出市场渗透率的具体预测,而这是我们的模型的主要目标(另见章节3.2)。
2.2. 调查
此外,多项调查探讨了人们对(额外)自动驾驶汽车定价的看法:20%的人愿意支付超过7000美元(109个国家,基里亚基迪斯等人,2015),25%的人分别在美国、英国和澳大利亚愿意支付2000美元、1710美元和2350美元(Schoettleand Sivak, 2014),20%的人在美国愿意支付3000美元(J.D. 功率, 2012),而在德克萨斯州奥斯汀,人们平均愿意支付7253美元(班萨尔等人,2016)或在澳大利亚愿意支付6903美元(埃利斯等人,2016)。
此外,还研究了自动驾驶汽车的接受度在性别、年龄和其他因素方面的差异。亚伯拉罕等人(2017)研究了消费者对其车辆中已有技术的满意度。此外,他们还调查了消费者如何了解车载技术,以及他们更希望以何种方式学习,并探讨了除火车外的各种私家车替代方案(汽车共享、拼车、手动或电动自行车和公共汽车)的使用意愿。对于所有替代方式(除火车外),从16至24岁人群到 75+人群,使用意愿随着年龄增长而稳步下降,而对地铁和火车的使用意愿几乎不受年龄影响。此外,他们的结果表明,较年轻者更愿意接受完全自动驾驶汽车,而老年人则倾向于仅接受可减少碰撞的驾驶辅助技术。
通过因子分析,哈布查等人(2017)发现驾驶乐趣、环境问题和支持自动驾驶汽车的态度在估计个体选择决策中起着重要作用,而技术兴趣和公共交通态度则没有贡献。赫尔西等人(2018)调查了参与者对自动驾驶汽车的感知,特别是关于安全性和可接受性的看法。在此,性别、年龄和风险偏好与不同类型车辆的感知风险以及对自动驾驶汽车的总体态度之间存在不同的关系。如果参与者为男性、较年轻者,或从乘客或行人的角度来看认为自动驾驶汽车风险较低,则他们更有可能对自动驾驶汽车持积极态度。相反,驾驶员状态并不是对自动驾驶汽车总体态度的显著预测因素。
在一项涵盖109个国家的5000人调查中,基里亚基迪斯等人(2015)发现男性比女性更愿意为自动化技术支付更多费用。男性对完全自动驾驶车辆的担忧似乎也少于女性。此外,他们发现目前使用自适应巡航控制(ACC)的用户更愿意为自动驾驶汽车支付更高的价格。研究还发现,ACC用户对于无方向盘驾驶以及数据传输更加感到舒适。
通过询问参与者最近的出行情况,克吕格尔等人(2016)发现年轻个体以及具有多模式出行模式的个体可能更倾向于采用共享自动驾驶汽车。在另一项调查中,李等人(2017)发现年龄与对自动驾驶汽车接受和使用的态度、看法及行为意向呈负相关。此外,文献中还研究了阻碍自动驾驶的因素,包括初始成本、许可和测试标准、隐私、对交通系统的其他组成部分的影响及其相互作用,以及实施细节(法尼昂特和科克尔曼,2015)。此外,责任问题(法尼昂特和科克尔曼,2015,安德伍德,2014;海松软件,2014)和安全(法尼昂特和科克尔曼,2015,舒特尔和西瓦克,2014;瓦莱,2013;海松软件,2014)被视为阻力。
Harper 等人 (2016) 和 Schmöller 等人 (2015) 研究了非驾驶人员、老年人以及患有出行受限疾病的人员对自动驾驶汽车的使用情况,Harper et al.(2016) and Schmöller et al.(2015)发现高峰时段、天气条件和与车辆的距离是决定汽车共享使用方式的因素。
将与我们的调查获得的结果进行比较,如第4节所示。
3. 方法论
3.1. 计算模型
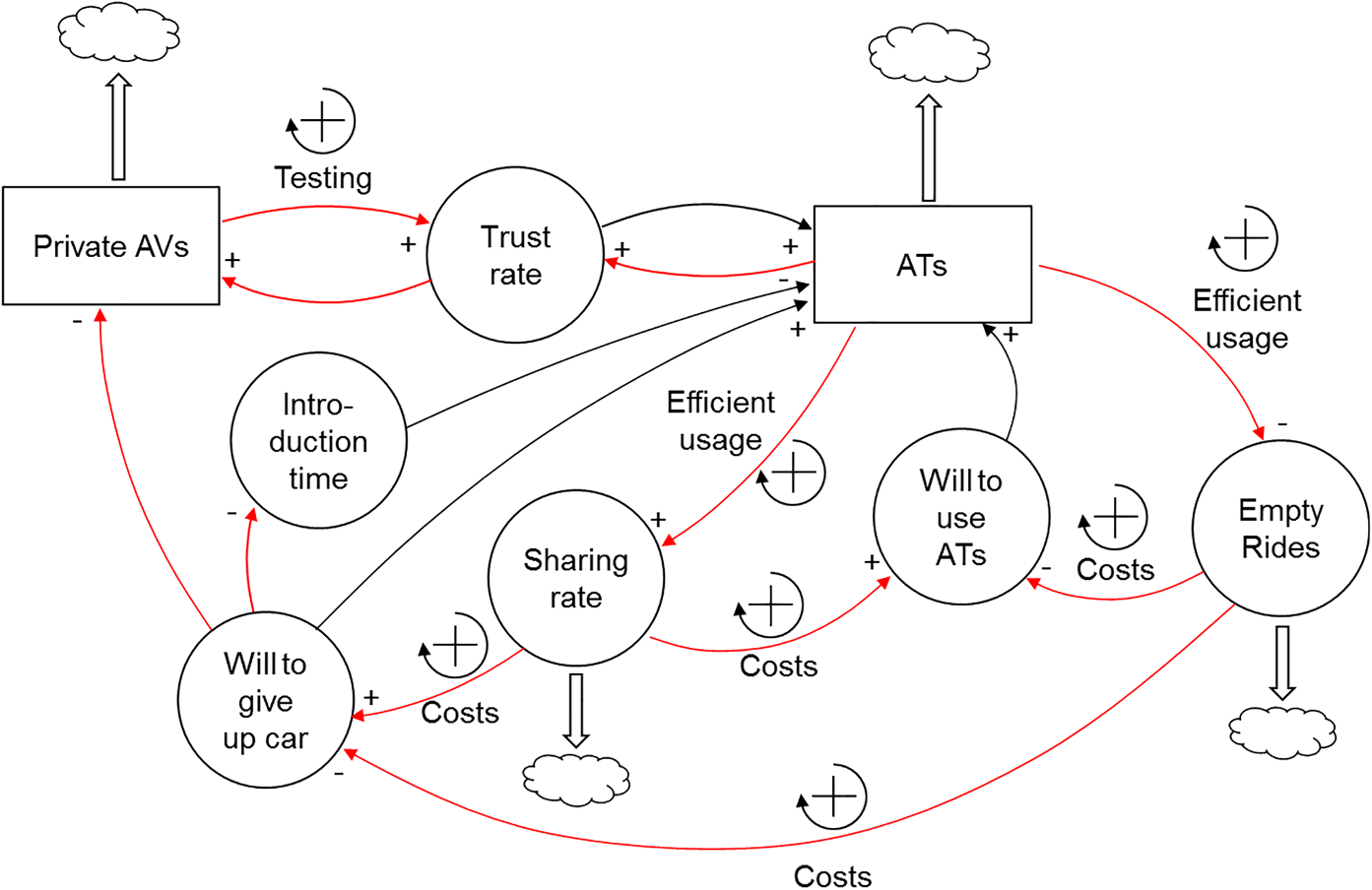
开发了一个系统动力学模型。由于所有输入变量均以年度为单位的离散变量给出(例如人口数量),该模型采用离散时间步长 (关于离散系统动力学模型的原理,参见Ossimitz 和 Mrotzek, 2008;Brans 等人, 1998)。此外,该模型具有使用时变方程的特点,虽然增加了额外的复杂性,但能够提供足够的准确性。该模型的主要特征如图1所示。
循环系统动力学模型非常适合研究系统内的效应,但由于其对输入参数的敏感性,通常难以做出明确预测。为了将系统研究与预测能力相结合,首先创建了该模型的一个无反馈的简化版本。该版本通过在调查中随调查时间变化地评估所用参数,从而避免了反馈,使这些参数无需在计算中进行模拟。该模型可预测交通方式替代方案3、4、5和6的市场渗透率,以及其他变量如行驶里程(VMT)。
该模型将在接下来的章节中首先展示。
然后,向模型中添加额外的依赖关系(反馈循环)并进行调整,以确保模型在基准情景下的输出保持不变。接着,通过敏感性分析研究其动态特性,并基于分析结果,对四个额外的情景及其输出进行分析(参见 第3.21和第5节)。
3.2. 对自动驾驶的阻力
系统动力学模型基于这一理念:在自动驾驶进入市场之前,必须克服若干障碍。其中,技术可行性(见第3.4节)在文献中经常被提及,此外还有法律状况和责任问题(见引言),这些仍需明确。其他研究的阻力还包括对自动驾驶技术的信任。
自动驾驶(参见 第3.19节和第4.2节),车辆的即时可用性(参见 第3.6节),隐私保护(参见第4.3节),自动驾驶的成本(参见 第4.4节),驾驶乐趣(另见 第4.4节),汽车作为地位象征(另见 第4.4节),家具运输(另见 第4.4节),现有车辆保有量(参见 第3.10节),车辆续航里程(参见 第3.20节),个人数据保护(参见 第3.20节),投资成本(另见 第3.20节)以及对可能的垄断者的反垄断担忧(另见 第3.20节)。这些阻力以及用于计算的其他参数(使用自动驾驶出租车的意愿和放弃私家车的意愿)源自文献和一项调查,详见 第4节。
3.3. 模型中使用的符号
模型中使用的符号总结在表2。
3.4 私人和共享车辆配备带方向盘的2至5级技术的引入情景(交通方式替代方案3和4)
如今,所有汽车制造商以及谷歌和苹果等新的潜在市场参与者都在积极研发自动驾驶汽车的技术解决方案。大多数企业已经宣布了其技术投放市场的时间,这一时间大致集中在2020年左右:特斯拉和百度为2018年,苹果为2019年至2021年之间,日产(Schaal,2013)、谷歌、丰田和沃尔沃为2020年(参见Muoio,2016;沃尔沃,2016),宝马则为2021年(Condliffe,2016)。这些技术可能在特定预设场景方面存在差异,例如相应技术是否能够实现自动泊车、在高速公路上或城市地区实现自动驾驶等。根据已公布的日期,本研究选择2020年作为交通替代方案3和4的初步引入年份:。
= 2020 s t
技术扩散曲线通常呈S型(例如参见Litman,2014,2018),其初期主要遵循线性曲线。由于本文仅研究该时间框架,因此使用函数的线性部分已足够。先前的研究基于与其他技术扩散率的比较进行预测。这些研究指出2040年达到30%的数值(Litman, 2014,2018),对应车队每年1.56%的增长率;以及2035年达到25%的数值(Bierstedt等,2017),对应每年1.43%的增长率。因此,本研究假设车队年均增长率为1.5%。该数值得到了班萨尔和科克尔曼(2017)的支持,他们通过建模预测2045年市场渗透率为 24.8–87.2%,对应年增长率为0.99–3.49%。表示配备方向盘的私人自动驾驶汽车比例(TA 3):
t 3 = × (t 2019) t g 3 3 (1)
= t 0 for 2019 g 3 (2)
= t 0.015 for 2020. g 3 (3)
3.5. 无方向盘的私人自动驾驶汽车(TA 5)的引入情景
此外,无方向盘的车辆将进入私人和出租车使用的市场。与任何其他新技术一样,制造商必须通过具有统计显著性的运行表现来证明其合法许可。由于带有方向盘的自动驾驶汽车在日常使用中可能同时实现这一目标,因此为此设定了四年时间框架( 。这意味着从2024年起,用于私人和出租车使用的不可控车辆将进入市场。
= T 4)d
由于大部分人口仍将习惯于亲自驾驶汽车,而那些对此感到适应的人群主要会转向自动驾驶出租车,因此私人不可控车辆的市场渗透率将比可控车辆慢得多,甚至可能根本不会发生。因此,假设一个非常保守的增长率,该增长率等于私人可控汽车增长率的1%。
As 表示私人不可控车辆(TA5)的百分比: t 5 = × t g t 5 5 4 3 (4)
= t 0 for 2023 g 5 (5)
= t 0.01 for 2024年 g 5 (6)
| 表2 | 本出版物中使用的符号(按出现顺序排列) |
|---|---|
| 变量/参数 | 描述 |
| t | 观测年份。在所有其他变量中用作索引变量 |
| ts | 自动驾驶汽车引入的起始年份 |
| t3 | 配备带方向盘自动驾驶技术的私人车辆百分比(TA 3) |
| g 3 | TA 3的年度增长因子 |
| Td | 带方向盘与无方向盘自动驾驶汽车引入之间的时间延迟 |
| t5 | 配备无方向盘自动驾驶技术的私人车辆百分比(TA 5) |
| g 5 | TA 5的相对年度增长因子 |
| T | TA 6引入情景的持续时间 |
| at | 可用的无方向盘共享车辆(TA 6) |
| 年龄min | 德国使用自动驾驶出租车的最低年龄 |
| Nt10 | 超过使用自动驾驶出租车最低年龄的人数 |
| Nt18 | 年龄超过18岁的人数(驾驶传统汽车所需年龄) |
| nt10 | 超过使用自动驾驶出租车最低年龄且可使用这些车辆的人数(TA 6) |
| nt18 | 年满18岁且可使用自动驾驶出租车的人数(TA 6) |
| t | 愿意放弃私家车的人的百分比 |
| ft | 私人车辆新注册数量 |
| pt | 私人车辆数量 |
| µt | 因成本因素使用自动驾驶出租车的用户百分比 |
| st | 至少偶尔使用自动驾驶出租车的用户数量 |
| t | 至少偶尔使用自动驾驶出租车的用户百分比 |
| t | 主要使用公共交通的人的百分比 |
| pt 5 | 配备无方向盘自动驾驶技术的私人车辆数量(TA 5) |
| pt 3 | 配备有方向盘自动化驾驶技术的私人车辆数量(TA 3) |
| qt | 共享车辆数量 |
| qt 4 | 配备有方向盘自动化驾驶技术的共享车辆数量(TA 4) |
| rt | 一辆共享汽车所替代的私家车数量 |
| qt 6 | 配备无方向盘自动驾驶技术(TA 6)的共享汽车数量 |
| dt | 自动驾驶汽车总数 |
| ht | 包含汽车共享在内的车辆总数 |
| t | 自动驾驶汽车比例 |
| b | 代替一次私家车出行所需的共享出行次数 |
| 车辆调配中的空驶率 | 3.16 |
| z | 因空驶增加的车辆行驶里程 |
| t w | 使用加权的自动驾驶汽车比例 |
| t | 与2015年相比的车辆行驶里程 |
| kt | 新增汽车共享注册数量 |
| gt | 新增注册数量 |
| t m | 年龄为m岁的人群在t年的技术信任率 |
| t | 信任自动驾驶技术的人的百分比 |
3.6. 无方向盘共享车辆的引入情景(TA 6)
如果用户完全放弃私家车,替代方案必须随时可用。在TA 3和5的情况下,用户仍然拥有自己的汽车,因此可用性不会构成障碍。然而,对于自动驾驶出租车(TA 6)而言,必须达到车辆的“临界数量”。虽然可控的共享汽车(TA 2 和 TA 4)也可能实现这一目标,但更有可能的是,此类大规模投资将由Waymo(谷歌)或苹果等企业进行,这些企业计划使用不可控的自动驾驶出租车。
因此,假设以下基准情景:引入阶段呈S型(见第3.4节和Gordon 等,2018),以余弦函数表示。由于引入时长难以准确估计,T = 15年被初步选定,因为其他技术如安全气囊(Hüttenrauch 和 Baum,2007:55)或电子稳定程序(Reifenpresse,2010)在国家层面实现市场渗透均耗时约15年。该估计可能较为粗略,但财务分析(第3.20节)和敏感性分析(第6节)将表明,由于成本原因,更短的引入时间极不可能,而更长的引入时间则不会产生显著影响(只要延迟不太久)。因此,这可能是一个可行的情景。以表示自动驾驶出租车的相对可用性:
at = a t 0 for 2023 t (7)
= + + a t t T T t cos(( 1)·/) 1 2 for 2024 2038 t s D (8)
= a t 1 for 2039 t (9)
3.7. 自动驾驶出租车偶发使用者的年龄
假设10岁及以上的儿童会使用自动驾驶出租车,例如在上学途中。这假设了一个相对较年轻的年龄,但尤其是在10岁时,学生通常乘坐公交车上学。因此,所有数据均按10岁以上的人(用于汽车使用方式),以索引‘10’表示( ),或18岁以上的人(用于汽车拥有情况),以索引‘18’表示进行计算。因此, 和 分别表示德国10岁和18岁以上人口数量,人口数据来自德国联邦统计局,2015。
= 10 min 年龄 Nt 10 Nt 18
3.8. 能够使用自动驾驶出租车的人口
可从人口数量(见第3.7节)和车辆的可用性(第3.6节)计算出10岁和18岁以上能够使用自动驾驶出租车的人数:
= × n N a t t t 10 10 (10)
= × n N a t t t 18 18 (11)
3.9. 私家车新注册数量
预计在本预测范围内,如果不引入自动驾驶技术,私人车辆的新注册数量将保持在2015年的水平(每年321万辆,Statista, 2016a)。然而,从2024年起,由于人们转向使用自动驾驶出租车,新车注册数量将逐年减少。这些人群需要对自动驾驶产生信任 (,参见第3.19节和第4.2节),愿意放弃自己的私家车(,参见第4.4节),并且必须能够获得自动驾驶出租车服务(,参见第3.6节)。因此:
= f t 3.21·10 for 2023 t 6 (12)
= × × × f f a t (1 ) for 2024 t t t t 2023 (13)
评估结果在第5.7节中展示并讨论。
3.10. 私人车辆总数
另一个需要考虑的方面是汽车现有保有量。人们刚购买新车后立即出售以更换为自动驾驶出租车的可能性相当低,而更可能的情况是老旧报废车辆将不再被新车替代。目前,德国的汽车保有量稳定在4510万辆(KBA, 2016)。每年大约有321万辆新车注册( Statista,2016a),这意味着相同数量的车辆被报废或出口。由此计算得出,一辆汽车平均使用约14年。因此,该模型包含了对14年前注册的汽车数量进行报废处理。
因此,假设私人车辆数量将保持在2015年的水平不变,直至2024年。随后,随着自动驾驶出租车的引入,新车注册数量下降(见第3.9节),而每年报废的车辆数量由14年前注册的车辆决定。以2023年的新车数量作为每年报废量,持续至2038年,并从2039年起分别使用14年前注册的汽车数量,由此可得私人车辆数量为:
pt = p t 45.1·10 for 2023 t 6 (14)
= + p p f f t for 2024 2038 t t t 1 2023 (15)
= + p p f f t for 2039 t t t t 1 14 (16)
此处忽略了自动驾驶出租车的引入可能导致家庭第二辆车吸引力下降的影响。私人车辆数量随时间的变化在第5.4节中展示并讨论。
3.11. 自动驾驶出租车用户
如第3.8节所述,自动驾驶出租车将被成年人以及年龄超过10岁的儿童使用。该人数已包含对自动驾驶出租车的访问。但这些人除非对技术有信任(参见第3.19节和第4.2节),并且相较于私家车具有成本或使用优势(参见,第4.4节),否则不会使用自动驾驶出租车。因此,自动驾驶出租车用户数量为:
nt10 t µt st = × × s n µ t t t t 10 (17)
这也可以用人的比例来表示: = s N t t t10 (18)
然而,该公式并未区分主要使用私家车的人群和主要使用公共交通的人群。这些数据的时间变化趋势在第5.1节中展示并讨论。
3.12. 无自有车辆的人群
2017年,80.0%的人口既有驾驶执照又能使用汽车(Ecke 等,2018)。相应地,= 20.0%的人主要通过出租车和公共交通出行。这一比例预计将持续保持稳定至2023年,因为近年来该比例一直保持不变(Weiß 等,2016;BAG,2019)。从2024年开始,由于人们转向使用自动驾驶出租车,这一比例可能会增加。增长主要来自此前并未依赖公共交通的人群,这些人将不再续购汽车(,参见第3.9节和第3.10节),但能够使用自动驾驶出租车(,第3.8节):
t = t 20.0% for 2023 t (19)
= + × × f f p a t (1 ) ( ) for 2024 2038 t t t t t t 1 1 2023 (20)
= + × × f f p a t (1 ) ( ) for 2039 t t t t t t t 1 1 14 (21)
无私家车的人群随时间的变化情况在第5.2节中展示并讨论。
3.13. 自动驾驶车辆数量
私人自动驾驶汽车中带( )和不带方向盘( )的数量仅由这些车辆的百分比( 和 ,第3.4和3.5节)乘以私人车辆总数( ,第3.10节)得出。
= × p p t t t 3 3 (22)
= × p p t t t 5 5 (23)
在2024年自动驾驶出租车引入之前,共享车辆数量由2015年可用的15,400辆车辆(Statista,2017)加上4.5%增长率(假设2015年至2016年的增长率保持不变)得出。从2024年开始,共享车辆数量由配备( )和不配备( )方向盘的自动驾驶共享车辆之和给出(两者均在本章节后续部分介绍):
= × q t 15.400 1.045 for 2015 2023 t t 2015 (24)
= + q q q t for 2024 t t t 4 6 (25)
共享车辆的评估在第5.4节中展示并讨论。
从2020年到2023年,所有新增的共享汽车仍将是可控自动驾驶汽车,包括平均每2年更换一次的车辆(Friedel, 2014)。从 2024年开始,共享车辆的增长率预计将下降至2%,这是S型曲线末期下降趋势的线性近似。与之前一样,这对应的是此前使用公共交通的人群。与此同时,信任自动驾驶的人将由于成本和可用性原因转向自动驾驶出租车(见第3.6节),在相应时间点这些自动驾驶出租车将可供使用。从2039年开始,不再预期有增长,使用可控共享汽车的人群将是那些不信任自动驾驶汽车的人:
=q t0for4t 2019 (26) = × + 0 045 2020 4 2019 2018 q d d. (27) = 2021 4 2021 q d (28) = × q q t 1.02 for 2022 2023 t 4 2021t 2021 (29)
= × × q q t t 1.02 1 2039 2024年 2037 t t t 4 2023 4 2023 (30)
= × × q q n n t 1 1 for 2038 t t t t t t 4 41 1 10 1 10 (31)
需要注意的是,d的取值在2021年之前来源于d,而从2022年开始将根据(见下文)得出。目前,共享车辆平均每天使用7.7次 (Car2go, 2017)。随着2024年引入不可控出租车,分配比例将略有增加,一辆共享车辆将替代八辆私人汽车(平均为10( Boesch 等,2016Liu 等人,2017年))。因此:
= r t 7.7 for 2015 2023 t (32)
= r t 8 for 2024 t (33)
自动驾驶出租车的增长源于人们从可控共享汽车转向自动驾驶出租车,此外,还有部分人从私人车辆转向自动驾驶出租车( ,第 3.11节)。从2039年开始,同样的效应持续发生,由于不断增长的信任率,人们从可控汽车转向非可控汽车:
= q t 0 for 2023 t 6 (34)
= × + ( ) q q t s r t /(2040 ) 1 for 2024 2039 t t t t t t 6 4 2040 t (35)
= + + q q q q s r s r t for 2040 t t t t t t t t 6 1 6 1 4 4 1 (36) 最后,从2022年起,自动驾驶汽车总数通过累加私用和共享自动驾驶汽车得出:
= + + + d p p q q t for 2022 t t t t t 3 5 4 6 (37)
自动驾驶车辆的时间发展情况在第5.3节中展示并讨论。
3.14. 车辆总数
根据私人(,第3.10节)和共享(,第3.13节)车辆的数量,可以计算出车辆总数:
= + h p q t t t (38)
如第5.4节所述并进行了讨论。
3.15. 自动驾驶汽车比例
自动驾驶汽车的比例 仅由其数量(,第3.13节)除以所有车辆(, 第3.14节)得出:
= d h t t t (39)
然而,该值忽略了自动驾驶功能是在可控的汽车中使用,还是由人们自行驾驶。该值的时间演变如第5.5节所示。
3.16 使用加权的自动驾驶汽车比例
要计算自动驾驶汽车行驶里程占比,需将私用和共享自动驾驶汽车的数量(和 ,以及 和 ,参见第3.13节)除以所有私人和共享车辆的数量(和 ,另见第3.13节)。然而,对于共享出租车,需考虑三种效应。
每辆自动驾驶出租车平均替代八辆私人车辆(参见第3.13节),因此行驶里程为= 8(或= 4)倍 rt rt
更多英里。
其次:所有人群中,有1/3的人只会独自使用自动驾驶出租车,而2/3的人愿意与其他用户共享(参见第4.3节)。假设这些愿意共享的用户在初期每三次出行中会共享一次,因为并非每次出行都能成功匹配不同用户的行程;到2030年后,随着自动驾驶出租车数量的增加,每三次出行中会有两次被共享。因此,总体而言:b= 5/6 用于 ,以及 b= 11/15 用于 。
t2020 2030 t 2031
第三:每辆共享出租车需要7.8–14.2%的空驶率(刘等人,2017年 用于分配。此处针对每英里0.5美元(1.6公里)情况计算出的 = 7.8%的值与非常便宜的新车每公里30欧分(0.625英里)的成本相当吻合(见第4.4节)。因此,一个因子为
=+ = z 1 1 1.085 (40)
由于空驶而增加的车辆行驶里程被选为额外行驶里程。综合考虑这三种影响,可得出自动驾驶车辆的车辆行驶里程比例:
tw = + + × + × × × p p r q p r q b z t for 2020 2023 tw t t t t t t t 3 5 (41)
= + + × × × + × × × p p r q b z p r q b z t for 2024 tw t t t t t t t 3 5 (42) 该值的时间演变如 第5.5节 所示。然而,此公式忽略了在共享乘车中接载同行旅客所需的额外时间(Fagnant andKockelman, 2014),因为只有少数乘车是共享的,且人们仅在行程不会显著延长的情况下才会选择拼车(参见 第4.3节)。
3.17. 车辆行驶里程
共享乘车会导致道路上的交通流量减少,这预计从2024年开始,随着自动驾驶出租车的大规模引入而实现。利用该效应的公式以及空驶里程(
(见第3.16节)并除以2015年的汽车数量(见第3.14节),可得出与2015年相比的车辆行驶里程:
= + × + × p r q p r q t for 2016 2023 t t t t 2015 2015 2015 (43)
= + × × × + × p r q b z p r q t for 2024 t t t t 2015年 2015年 2015年 (44)
该值的时间演变如第5.6节所示。然而,该公式未区分城市道路和干线道路,其中在公共自动驾驶汽车投入使用初期主要使用前者,而后者对行驶总里程的大部分具有决定性作用。
3.18. 新注册总数
最后,新增汽车共享注册数量由当年新增车辆数加上需要替换的车辆数决定。迄今为止,共享汽车通常在使用1至3年后进行更换 (Friedel, 2014)。如果在2至3年后出售,这些车辆通常会被报废。由于共享的不可控自动驾驶出租车将很难转售,因此假设一半车辆在2年后更换,另一半在3年后更换:
= + + k q q k k 2 2 t t t t t 1 2 3 (45)
所有新车注册数量由私人( ,第3.9节)和共享( ,见上文)车辆的新车注册数量相加得出:
=+ g f k t t t (46)
该值的时间演化如 第5.7节 所示。
3.19. 调查数据
从调查中,模型获得了三个重要数值:对自动驾驶技术的信任、因成本原因至少偶尔使用自动驾驶出租车的人群比例,以及因成本原因愿意放弃私家车并转向使用自动驾驶出租车的人群比例。
3.19.1. 对技术的信任
信任率可直接通过调查获得,直至2024年。对于2024年,参见第4.2节。此外,做出以下假设:在2024年年龄为10岁或更年轻者的信任率为100%,因为
= 83.5%
将伴随着该技术成长,而18岁驾驶员的现有信任率为83.5%。其余年龄组的信任率呈线性下降。
随着时间的推移,所有年龄组的信任率预计将稳步上升。预计2024年时年满18岁及以上人群的信任率将在20年内逐步提高(但不会达到100%,因为可能有一部分人始终不会改变观点)。同样,2024年年龄在11至17岁之间的人群的信任率也将在20年内上升。他们的最终信任率随年龄呈线性下降,即:98.75%(2024年时11岁)、97.5%(2024年时12岁)、91.25%(2024年时17岁)。中间年份的数值由以下方式给出(例如):
= 90%
2044
= + × = + × (2026 2024) 20 95.9% 2 97.5% 95.9% 20 2026 14 2024 12 2044 32 2024 12 (47)
这里,表示在第t年年龄为m岁的人群的信任率。 对于tm2024年之后的年度总信任率的计算,首先将与年龄相关的信任率乘以相应年龄的人数,进行汇总,然后除以所有18岁以上的人口总数。
= × = = N N t for 2025 t i ti t i i ti 18 100 18 100 (48)
With yo随着年轻人不断进入市场,整个群体的平均信任率上升 n.
3.19.2. 由于成本因素的自动驾驶出租车用户
如第4.4节所示,由于成本因素导致的自动驾驶出租车用户占比为:
= µ t 25.7% for 2027 t (49)
= µ t 30.1% for 2028 t (50)
此处,2028年对应于自动驾驶出租车在更多农村地区的引入(参见第4.4节)。
3.19.3. 愿意放弃自己汽车的人
类似地 y,由于成本原因愿意放弃私家车的人的百分比(参见第4.4节)i s:
= 2027 t 20 8 t .% 用于 (51)
= 2028 t 16 3 t .% 对于 (52)
3.20. 进一步考虑
对自动驾驶出租车引入的以下方面进行了研究,但结果表明它们对基准模型没有影响。
3.20.1 自动驾驶出租车制造商和供应商的投资成本
为了估算自动驾驶出租车(TA 6)引入的成本,考虑了其使用方式、引入时间以及生产成本。每辆自动驾驶出租车的投资成本一次性计入,因其在2至3年的更新周期前已摊销完毕(smartpit, 2012)(Friedel, 2014)。
投资成本可根据初始购买数量和每辆车8000欧元的价格计算得出(10000欧元减去20%折扣,Schlesiger,2014)。对于自动驾驶出租车,还需增加新技术的额外成本,此处选择较为保守的4000欧元(参见文献综述)。
将240万辆自动驾驶出租车乘以12000欧元,得出290亿欧元。然而,这里不仅需要考虑德国,还需同时考虑所有引入该技术的国家。根据德国8150万居民(德国联邦统计局,2015)推算至欧洲、美国和加拿大共11亿居民(Statista,2016b),总投资额将达到 3900亿欧元。这表明,对于现金储备合计达4640亿美元的企业如Alphabet(谷歌)和苹果而言,此类投资在财务上是可行的( Egan,2017)。特别是在亚洲,还有百度等企业拥有额外的财务资源来开拓本地市场。
根据最大情景下获得的1300万辆自动驾驶出租车(见第5.2节),总额将增加到2万亿美元。这无疑会限制自动驾驶出租车的引入。
3.20.2. 出租自己的汽车
先前的一项研究表明,28.8%的受访者表示在自己不使用汽车时会将其出租(AutoScout,2015)。此处忽略了这一效应,一方面是因为这些人群中大多数人可能在车辆被使用者污染或损坏后改变想法;另一方面,尚不清楚这些人中有多少比例会转而使用自动驾驶出租车,从而不再拥有自己的私家车。
3.20.3. 车辆续航里程
根据 AutoScout(2015年)的一项研究,超过70%的人口希望其车辆具备500公里续航里程,这正是
目前尚未被电动汽车实现。此外,电动汽车充电站的全面可用性也尚未满足。这些障碍经常被等同于自动驾驶,尽管并无必然关联,因为自动驾驶汽车不一定必须配备电力驱动。此外,用于城市交通的自动驾驶汽车可以采用电力驱动(如Car2go目前已实现),而其他长途出行则可使用内燃机驱动(如目前租车公司已实现)。除此之外,共享自动驾驶出租车在长途旅行中可与其他出租车相遇,用户可从一辆电量耗尽的车辆换乘到一辆已充满电的电动汽车。因此,电力驱动并非自动驾驶汽车推出的障碍。
3.20.4. 个人数据保护
如果预订共享汽车,至少会向提供商提供一些个人数据。对某些人来说,这可能成为不使用共享车辆的原因。由于90%的汽车驾驶员愿意提供个人数据(至少在能缩短出行时间的情况下,麦肯锡,2016年),并且由于不使用个人数据的提供商也可能进入市场,因此个人数据保护并不被视为自动驾驶引入的障碍。
3.20.5. 自由竞争与反垄断法
目前已有多个合作项目致力于共同开拓自动驾驶的未来市场。例如,宝马、英特尔和Mobileye之间的合作( Schmidt‐Lackner,2016年),菲亚特‐克莱斯勒与谷歌之间的合作(Fluhr,2016年),以及通用汽车、Lyft和Cruise之间的合作 (德国商报,2016年)。由于自动驾驶出租车需要达到一定的可用性才能进入市场,长期来看可能仅存在一个自动驾驶出租车供应商 (毕马威,2010年;Ruhkamp,2014年)。如果多个合作项目均达到这一临界数量,则可能出现寡头垄断,从而形成准自由竞争。
主要供应商之间的进一步合并可能会受到竞争监管机构的阻止。对于本研究而言,这意味着不太可能出现垄断,从而避免因高成本等原因导致自动驾驶的引入延迟。
3.21. 循环模型
为了进行敏感性分析,使用了图1 所示的闭环系统动力学模型。
3.21.1. 附加依赖关系
为了包含循环依赖关系,将以下方程添加到前几章节中描述的线性化模型中。其中,方括号中的参数指的是基准情景的数值。这些参数可以理解为调查中确定的比例系数。以这种方式表述依赖关系可确保循环模型在基准情景下产生与非循环模型相同的结果。
:= · [ ] ·[ ] t t t t t t 3 3 1 1 1 1 (53)
= q q : · [ ] · [ ] t t t t t t 1 3 1 3 1 6 1 6 (54)
= T T : ·[ ] t t t t 1 1 (55)
= z z b b : ·[ ]·[ ] t t t t t t 1 1 1 1 (56)
= µ µ z z b b : ·[ ]·[ ] t t t t t t 1 1 1 1 (57)
= z z q q : ·[ ] t t t t 1 6 1 6 (58)
= b b q q : ·[ ] t t t t 1 6 1 6 (59)
在进行敏感性分析时,随着时间尺度的变化,有效年份也必须随之变化。以下以公式(7)–(9)为例说明(见第3.6节):
= + a t t T 0 for t s D (60)
= + + + + + a t t T T t T t t T T cos(( 1)·/) 1 2 for t s D s D s D (61)
= >++ a t t T T 1 for t s D (62)
此外,模型中还引入了最高信任率为100%等限制条件以及其他约束,即信任率不会下降:如果 ,则 。一方面这看起来较为符合现实,另一方面它可防止出现例如
< t t 1 =: t t 1
事故导致对技术的信任下降,进而导致自动驾驶出租车减少。这种情况被作为额外情景单独研究(参见 第6.6节)。
3.21.2. 输入参数和输出变量
为了评估模型,对19个易错输入参数和11个输出变量进行了敏感性分析。通过调查获得的输入参数包括信任率(见第4.2节)、因成本因素使用自动驾驶出租车的用户百分比(见第4.4节)以及愿意放弃私家车的人的百分比(见第4.4节)。其他输入参数包括一辆共享汽车所替代的私人车辆数量(见第3.13节)、车辆调配中的空驶率( ,见第3.16节)、代替一次私家车出行所需的共享出行次数 ( ,见第3.16节)、使用ATs的最低年龄,见第3.7节)、自动驾驶出租车的引入时间( ,见第3.6节)、自动驾驶汽车的引入年份 ( ,见第3.4节)、自动驾驶汽车与自动驾驶出租车之间的延迟( ,见第3.5节)、可控私人自动驾驶汽车的增长率( ,见第3.4节) 以及不可控私人自动驾驶汽车的增长率( ,见第3.4节)。
t µt t rt b 年龄min T ts Td g 3 g 5
为了确定调查结果的误差,计算了99%置信区间,分别为和。这些由以下给出韦尔(2014)
= + = K P P z P P N [ ; ] with (1 ) 1, n K n K K n n 1 1 /2 (63)
其中,对应于参数位于置信区间内的概率,表示抽样误差,分别为相应的百分比和标准正态分布的分位数(对于为2.576)。
1 K Pn z1 /2 = 0.01
针对这五个值所获得的误差分别为 、 、 、 和 ,其中抽样误差以绝对值表示。此外,还考察了 的最终值,由于该数值较为随意, 因此假设其误差相对较高。基于理论最大值 100%,该误差假设为 100–90% = 10%。同样, 的两个值的误差分别为 和 ,而 的误差 分别为 和 (均为绝对值)。
t ± 26 4 .% 3.9% ± 42 4 .% 4.3% ± 58 3 .% 4.3% ± 74 3 .% 3.8% ± 83 5 .% 3.2% = 90% 2044 µt ± 25 7 .% 3.8% ± 30 1 .% 4.0% t ± 20 8 .% 3.5% ± 16 3 .% 3.2%
由于一辆共享汽车所替代的私人车辆数量(见第3.13节)是 的实际测量值,因此假设其相对精确,在敏感性分析中不予考虑。对于 ,刘等人(2017) 给出的最小值为5.6,因此误差估计为8–5.6= 24。因此:。
rt t2015年 2023年 t 2024年 = ± 4 t 8 2 r .
对于车辆分配的空驶率( ,参见第3.16节),刘等人(2017)给出的最大值为14.2%,对应的误差为14.2–7.8%= 6=6.4%。因 此:(绝对误差)。
= ± 7 8 .% 6.4%
代替一次私家车出行所需的共享出行次数( ,参见第3.16节)通过“最坏情况”进行估算,即在初期需要相同数量的乘车次数。因此,误差为 和 。
b = 1 5 /6 1/6 = ± 5 b/6 1/6
基准情景中使用自动驾驶出租车的最低年龄设定为10岁。最低年龄也可能是儿童开始使用校车的6岁,或由于政府规定而为14年。因此,误差设定为 14 −10= 10 −6= 4。故:。
= ± 10 4 min 年龄
引入情景选择为15年。然而,如果这一过程发生得更快,例如由于某个市场参与者试图通过先驱战略占领市场,则时间框架可能缩短至10年。因此,误差设定为15–10= 5:。
= ±T 15 5
大规模引入自动驾驶汽车的起始时间定为2020年。然而,有时企业会发布公告,但之后并未兑现。因此,这一时间点可能会向后推迟,而不会提前。再推迟两年是合理的。因此:。另一个类似的变量是可控制的自动驾驶汽车与不可控制的自动驾驶汽车引入之间的时间延迟。该延迟被设定为四年,但前后再增加两年是合理的。因此:。
= ± 2020 s 0 2t = ± 4 2 d T
带方向盘的私人自动驾驶汽车的增长率和不带方向盘的私人自动驾驶汽车的相对增长率已在第3.4和3.5节中分别确定。对于误差,采用班萨尔和科克尔曼(2017)报告的最小和最大增长率0.99和每年3.49%。因此:%/年。由于自动驾驶出租车的数值较为随意,将使用较大的80%相对误差: %(绝对误差)。输入变量汇总于表3。
= ± 1 5 g 3 0 . .511 99. = ± 1 8 g 5 0%
输出变量包括至少偶尔使用自动驾驶出租车的用户数量( )、私人车辆数量( )、主要使用公共交通的人口比例( )、共享车辆数量( )、自动驾驶出租车数量( ,TA 6)、可控私人自动驾驶汽车数量( ,TA 3)、包含汽车共享在内的车辆总数( )、自动驾驶汽车总数( )、自动驾驶汽车比例( )、使用加权的自动驾驶汽车比例( )以及与2015年相比的车辆行驶里程( )。
st pt t qt qt 6 pt 3 ht dt t t w t
4. 调查
4.1. 概述
一些模型参数可从文献中获取,而人们对自动驾驶的看法则通过匿名在线调查确定。问卷通过社交媒体(如Xing和Facebook) 以及大学内部网站(DHBW,2018)进行分发。共有873名参与者完成了调查(N= 873)。
首先,进行了方差分析以研究性别、年龄、就业状况、教育程度、家庭中的成年人、家庭中的儿童、月收入和城市规模对自动驾驶技术信任的影响(η 2024 ,参见 第4.2节),以及共享意愿原则
乘车,使用自动驾驶出租车的意愿原则(μ2028,参见 第4.4节)以及放弃私家车的意愿(ω2028,参见 第4.4节)。所有显著的结果 (p< 0,05)均汇总于 表 4。
在我们的研究中,性别对所研究的四个变量均产生了影响。男性对自动驾驶技术表现出更高的信任,而女性则更愿意拼车、更愿意使用自动驾驶出租车而非拥有私家车,并且也更愿意放弃私家车。这与哈布查等人(2017)、赫尔塞等人(2018)以及Schoettle 和 Sivak (2014) 的研究结果一致,他们在研究中发现了性别的依赖性。相反,基里亚基迪斯等人(2015)仅发现该影响存在于部分变量上,而克吕格尔等人(2016)则完全未能验证该影响的存在。
受访者的年龄(出生年份)在我们的研究中也对三个变量产生了影响。1965年至1990年间出生的人比较年轻者和年长者对技术表现出更高的信任。此外,老年人总体上不太愿意拼车,也不太愿意使用ATs。在放弃私家车的意愿方面,该影响并不显著。在先前的研究中,亚伯拉罕等人(2017)、哈布查等人(2017)、赫尔塞等人(2018)、李等人(2017)以及Schoettle 和 Sivak (2014) 也发现了受访者年龄对自动驾驶技术态度的影响,而基里亚基迪斯等人(2015)和克吕格尔等人(2016)仅发现其对部分变量有影响。
此外,我们研究了 城乡之间的差异。对信任水平的影响是显著的,然而,但 t
| 表3 | 用于敏感性分析的19个输入变量及其误差汇总。 |
|---|---|
| 变量 | 值 |
| t 2019 | 对自动驾驶的信任 |
| =t 2020 | 对自动驾驶的信任 |
| =t 2021 | 对自动驾驶的信任 |
| =t 2022 | 对自动驾驶的信任 |
| =t 2024年 | 对自动驾驶的信任 |
| t,max | 对自动驾驶汽车的最大信任 |
| µt 2027 | 偶尔使用自动驾驶出租车的意愿 |
| µt 2028 | 偶尔使用自动驾驶出租车的意愿 |
| t 2027 | 放弃私家车的意愿 |
| t 2028 | 放弃私家车的意愿 |
| rt | 自动驾驶出租车替代私家车 |
| 空驶率 | 7.8% |
| b | 逆共享因子 |
| 年龄min | 使用自动驾驶出租车的最低年龄 |
| T | 自动驾驶出租车的引入时间 |
| ts | 开始引入自动驾驶汽车 |
| Td | 自动驾驶汽车与自动驾驶出租车之间的延迟 |
| g 3 | 可控私人自动驾驶汽车的增长率 |
| g 5 | 不可控私人自动驾驶汽车的增长率 |
| 表 4 | 方差分析研究性别、出生年份、城市规模、工作状况和月收入对自动驾驶技术的信任、共享出行的基本意愿、使用自动驾驶出租车的意愿以及放弃私家车的意愿的影响。显著的依赖关系(p< 0,05)已标记为*。 |
|---|---|
| 变量 | 技术- 技术 信任 |
| 性别 | * |
| 女性 | 79,7% |
| 出生年份 | * |
| 1990–2000 | 80,8% |
| 1981–1989 | 85,7% |
| 1965–1980 | 90,2% |
| 1955–1964 | 78,9% |
| 1946–1954 | 80,0% |
| ≤1945 | 75,9% |
| 工作状况 | * |
| 失业 | 81.8% |
| 学生 | 80,6% |
| 兼职 | 83,7% |
| 全职 | 89,7% |
| 退休 | 76,0% |
| 城市规模 | * |
| 0–20 吨 | 82,8% |
| 20–50 吨 | 87,9% |
| 50–100 吨 | 75,8% |
| >100 t | 85,4% |
| 每月 收入 | * |
| 0–1000 欧元 | 77,8% |
| 1000–2000 欧元 | 79,0% |
| 2000–3000 欧元 | 78,8% |
| 3000–4000欧元 | 92,7% |
| 4000–5000欧元 | 93,3% |
| ≥5, 000 € | 89,4% |
研究就业状况(失业、学生、兼职、全职、退休)发现,退休人员对技术的信任度略低。此外,他们使用自动驾驶出租车的可能性较小, 而从事兼职工作的人则更有可能使用自动驾驶出租车。在此方面,哈布查等人(2017)以及Schoettle 和 Sivak (2014)均发现了就业状况的影响。
然后,研究了受访者月收入的影响。在此,只有65%的人回答了这个可选问题。他们指出,较富裕人群对技术的信任度更高,但尤其是收入最高的人群更不愿意拼车、更不愿意使用ATs,也更不愿意放弃自有汽车。相比之下,克吕格尔等人(2016)并未发现这方面的影响。
未发现受访者教育程度对结果有影响(未在表 4中显示)。相比之下,哈布查等人(2017)以及Schoettle 和 Sivak (2014)在此方面发现了影响。此外,家庭成年人数量未发现有影响(哈布查等人(2017)发现了影响),家庭儿童数量也未发现有影响(哈布查等人(2017)发现了影响,而克吕格尔等人(2016)则未发现)。
为了考虑性别、年龄和城市规模对参数的影响,已根据各群体在研究中的出现比例与人口比例之间的比率对其回答进行了加权 (Bethlehem et al., 2011: 209 ff.)。表 5总结了这些百分比。其他显著的影响变量工作状况和月收入未在此使用,因为它们与性别和年龄相关。
4.2. 对自动驾驶技术的信任
我们的调查结果显示,如今已有26.4%的人口会在主管部门将其认定为安全的情况下信任自动驾驶技术。另有34.1%的人表示, 在亲自体验并感到安全后会依赖该技术。还有13.8%的人会在该技术经受至少两年的实际验证后使用。假设从2020年起所有感兴趣的人都可以试用自动驾驶汽车,从而使该技术向这些人证明其安全性。因此,2019年26.4%的信任率将在三年内线性增长至2022年的 74.3%。到2025年,在经过五年的验证后,还可再增加9.2%(见图 2)。
如表示 t 信任自动驾驶技术的人的百分比,所使用的参数是 e:
= 2019 t 26 4 t .% 对于 (64)
= = 2020 t 42 4 t .% 对于 (65)
| 表 5 | 性别、出生年份和城市规模的权重。 |
|---|---|
| 性别 | 出生年份 |
| Male女性 | 1990–2000 |
| 研究中的占比 | 56,7% |
| 人口占比 | 49,3% |

= = 2021 t 58 3 t .% 对于 (66) = =[2022, 2023] t 74 3 t.% 对于 (67) = = 2024 t 83 5 t .% 对于 (68)
2024年之后的信任率计算如第3.19节所示。
4.3. 隐私保护
根据 AutoScout(2015年)的一项研究,54%的参与者为了保护隐私,不会让陌生人乘坐他们的汽车或将其私家车交给陌生人。我们的研究得出了类似的结果,其中33%的人只会独自使用AT,或仅与认识的人共享。这一比例较低,因为该问题涉及的是自动驾驶出租车,而非私家车。关于共享自动驾驶出租车的调查结果如 图3 所示。
共享出租车的人越多,成本就越有利。这对于共享出租车的成功至关重要,并已包含在计算中(参见 第4.4节)。
4.4. 自动驾驶的成本
自动驾驶出租车只有在价格低于私家车的情况下才会被大规模使用,特别是当人们完全放弃私家车时。为了将自动驾驶的成本纳入计算,下文将共享车辆的成本与公共交通(p.t.)的成本进行比较。
为了比较不同的交通方式,选择了两次行程:一次是12公里(7.5英里)的行程,例如上下班;另一次是100公里(62英里)的较 长距离行程。为了计算公共交通的出行成本,选取了具有代表性的路线,计算得出的平均费用为2.85欧元(12公里)和22.85欧元 (100公里)。如今,共享车辆的租赁价格仅略高一些,具体价格取决于交通状况和预订套餐(DriveNow, 2018)。随着自动驾驶出租车进入市场及其使用效率的提高,中期价格将有所下降。若将这些车辆配置为电动发动机(预计在不久的将来其成本将低于内燃机) (Els, 2016; Wüllner, 2016),将进一步带来成本优势。此外,部分用户会与同行旅客共享自动驾驶出租车(参见第4.3节),这将 进一步降低使用成本。因此,自动驾驶出租车的成本预计将与公共交通的成本相当。
这些成本低于使用私家车的成本,一辆非常便宜的新车每公里约花费30欧分(ADAC, 2018)。然而,决定性因素并非交通运输的确切成本,而是人们对其产生的‘感知成本’。为了研究这一效应,调查中的参与者需要估算一次12公里前往工作场所的行程以及一次100公里高速公路行程的成本。随后,还需估算这两种行程使用公共交通的成本。通过此方式确定认为公共交通成本低于私人交通成本的人群比例。此外,还询问了如果成本相同,人们是否更愿意选择出租车完成相应行程。
如果受访者表示即使自动驾驶出租车价格更高也会使用,则认为他们会使用自动驾驶出租车,而不受其成本估算的影响。如果受访者表示在价格相同时会使用,则他们对公共交通的成本估算必须更低或相等。如果受访者表示自动驾驶出租车的价格必须更具优势,则他们对公共交通的成本估算必须更低。如果受访者表示更倾向于使用公共交通或私家车,则认为他们甚至不会偶尔使用自动驾驶出租车(见表6)。
对于12公里行程,总共有25.7%的人会偶尔使用自动驾驶出租车。该值被用于
前六年计算中仅涵盖大城市。从第7年开始,采用18.1%的数值,该数值是通过对两次出行(12公里和100公里)的数值取平均得出的, 因为此时也开始覆盖农村地区。此处确定的数值略低,原因是公共交通出行成本在长途出行中被趋势性地估计得更高。因此,由于成本因素导致的自动驾驶出租车用户比例为:
= µ t 25.7% for 2027 t (69)
= µ t 30.1% for 2028 t (70)
此外,以类似方式估算了因成本因素而愿意放弃私家车并转向自动驾驶出租车的人群比例。如果人们即使在自动驾驶出租车价格更高的情况下也会选择转换,则假定他们会进行转换,而不考虑其成本估算。如果人们在价格相等时会转换,则他们必须认为公共交通的成本较低或相等。如果他们表示成本必须略微或明显更有优势,则他们必须认为公共交通的成本较低。
如表7所示。
12公里的成本估算显示,20.8%的参与者愿意放弃自己的汽车,而以100公里取平均值则显示为16.3%。第一个值被类比用于前 6年的估算,而第二个值从第7年开始使用。因此,愿意放弃私家车的人的百分比为:
= 2027 t 20 8 t .% 用于 (71)
= 2028 t 16 3 t .% 对于 (72)
此项评估的优势在于,针对

















 1770
1770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









