





 1
1
00:00:01,590 --> 00:00:04,260
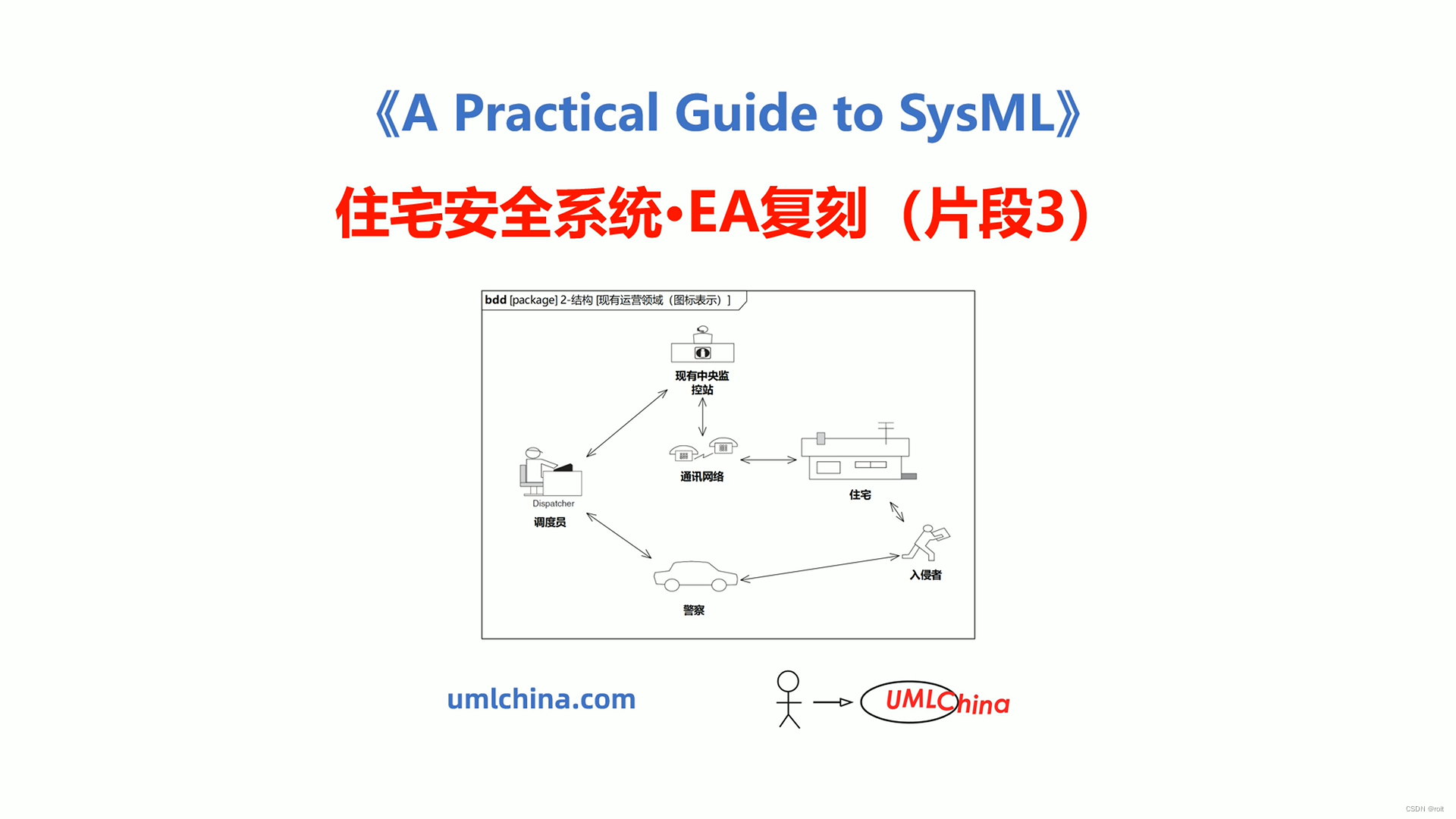
接下来,我们来看图17.8
2
00:00:05,590 --> 00:00:08,430
图17.8跟图17.7是一样的
3
00:00:08,440 --> 00:00:14,610
它也是描述运营领域现状的一个BDD
4
00:00:16,150 --> 00:00:18,340
但是它用图标来表示
5
00:00:19,260 --> 00:00:20,680
这样看起来生动一点
6
00:00:22,550 --> 00:00:26,450
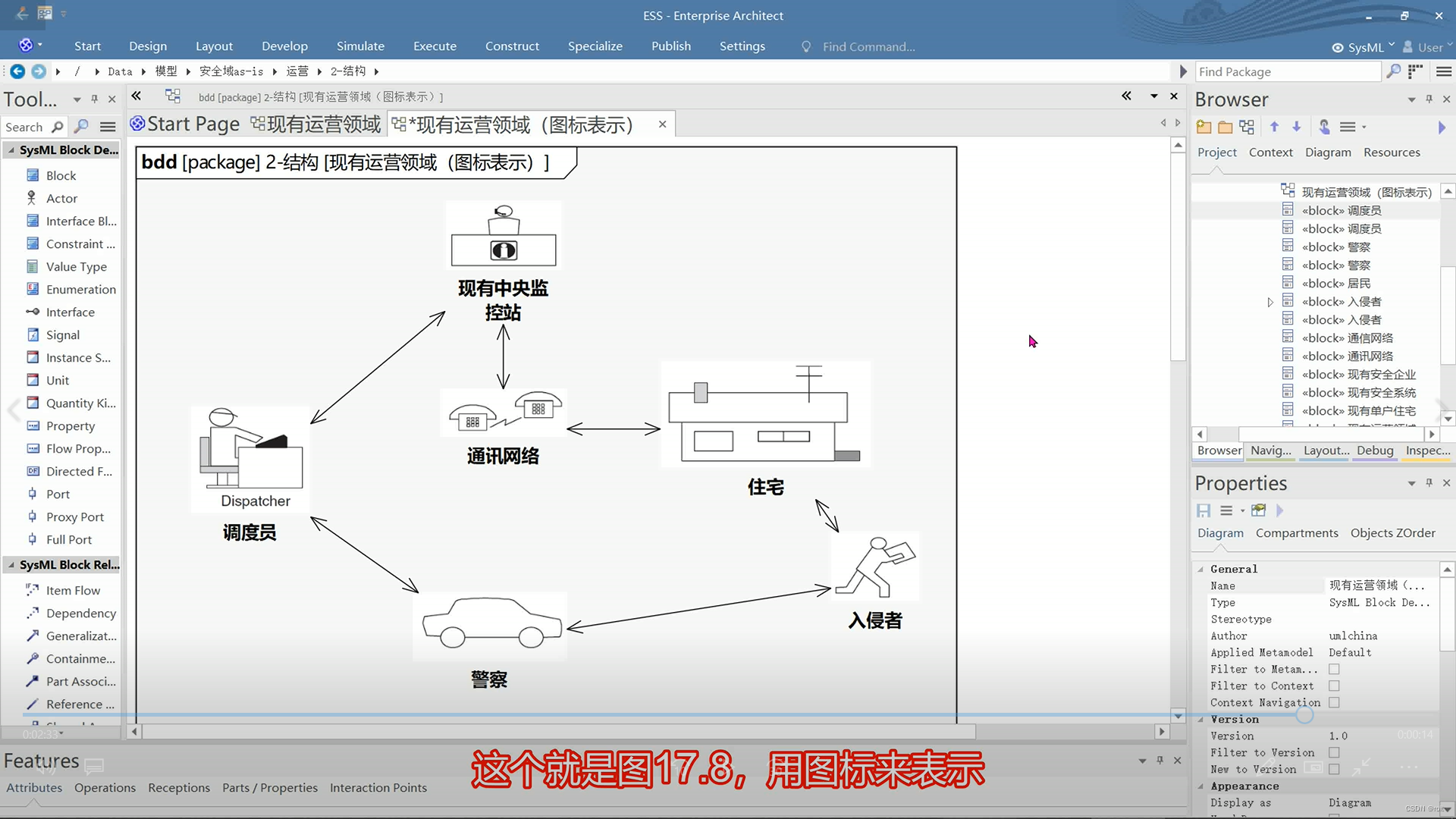
但是这个图应该不是用建模工具画出来
7
00:00:26,460 --> 00:00:28,610
你看,这里又缺少了元素
8
00:00:29,980 --> 00:00:32,740
包的名字,图的名字
9
00:00:33,090 --> 00:00:34,690
少了一个图的名字
10
00:00:35,900 --> 00:00:39,320
然后你看,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1181
1181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









