



睁着眼睛休息:具有数据融合的无线传感器网络中的随机目标覆盖
1 引言
无线传感器网络(WSNs)可用于监控目标或事件。在这种应用中,传感器需要同时覆盖多个位置。我们注意到,在以前的相关研究中(例如,刘等人(2007)和卡迪等人(2005)),假设目标以确定性方式出现,且作者未考虑系统的需求可靠性和数据融合模型。在实践中,目标经常在不同位置随机出现,且系统可靠性可能会降低以延长网络寿命。数据融合技术可用于提高覆盖效率,从而相应地延长网络寿命。许多相关研究,如刘等人(2007)、卡迪等人(2005)、田和乔治拉斯(2002)以及蔡等人(2009),均采用布尔感知模型,并假设传感器感知范围内的事件能够被准确检测,而感知范围外的事件则完全无法检测。该布尔模型有助于对覆盖问题进行几何分析。然而,该模型忽略了实际传感器监控系统中的两个事实:信号衰减以及噪声对传感器读数的影响。在实际的传感器监控系统中,广泛采用数据融合方案,通过融合多个邻近传感器的读数来消除噪声影响。数据融合可提高检测质量,并降低满足覆盖要求所需的传感器密度。本文关注在传感器用于覆盖随机目标且能够进行数据融合,并满足系统可靠性要求的情况下,如何最大化网络寿命。
本文的主要贡献如下:
- 我们通过考虑系统可靠性和目标出现概率,在数据融合模型中处理随机目标覆盖问题。
- 在通过限制证明了随机覆盖最大寿命问题的NP完全性后,我们将最大寿命问题简化为概率集合覆盖(PSC)问题,并提出了一种基于PSC的算法来解决该问题。该算法适用于小规模网络。
- 我们提出了一种具有低时间复杂度且适用于大规模网络的高效算法。
- 我们量化了系统可靠性与网络寿命之间的权衡,并通过大量仿真验证了所提出算法的能量效率。
本文的其余部分组织如下:第2节介绍了关于无线传感器网络中寿命和覆盖问题的前期工作。第3节列出了一些重要的符号和模型,这些模型将在全文中使用。在第4和第5节中,我们对随机目标覆盖问题进行形式化,并给出了该问题的解决方案。第6节提出了一种贪心算法。第7节提供了仿真结果。最后,第8节总结了本文的工作。
2 相关工作
无线传感器网络中的覆盖与部署问题已研究多年。由于我们主要讨论传感器监控系统的点覆盖,因此之前的研究关于区域覆盖、栅栏覆盖、扫描覆盖的内容不包含在以下部分中。为了延长传感器监控系统的寿命,刘等人(2007)使用线性规划技术求解最大寿命问题,并根据调度矩阵轮流选择传感器集合。田和乔治拉斯(2002)提出了一种分布式覆盖保持节点调度协议,通过关闭冗余节点来降低能耗。桂和莫哈帕特拉(2004)提出了用于目标跟踪的节能协议,并提供了一组用于评估监视质量的有效指标。卡迪等人(2005)将目标覆盖问题建模为最大集合覆盖问题,将节点组织成非不相交覆盖集,然后依次激活这些覆盖集。蔡等人(2009)研究了定向传感器网络中的目标覆盖问题。在证明定向覆盖集问题的复杂性后,他们提供了用于调度定向覆盖传感器集合以延长网络寿命的启发式算法。丁等人(2012)为最大生命周期覆盖问题提供了一个多项式时间(4+ ϵ)‐近似算法。然而,这些研究所采用的传感器测量模型均为布尔感知模型,未考虑信号衰减和噪声影响。
最近,许多关于覆盖与部署问题的研究工作(Ahmed等人,2005;Hefeeda和Ahmadi,2007)采用了概率感知模型,该模型相比布尔感知模型能更准确地描述感知行为。他们设计了多种概率覆盖算法以维持所需的覆盖范围。此外,数据融合作为一种先进的协作信号处理技术(Varshney和Burrus,2007),已被广泛应用于多项研究中,如杜阿尔特等人(2004)和何等人(2004),以提高目标分类、检测与跟踪的有效性。牛和瓦尔什尼(2005)研究了基于周围传感器检测输出的最优决策融合规则。王等人(2007)和邢等人(2009)分别从算法和分析角度证明了数据融合可以改善无线传感器网络的覆盖。谭等人(2010a)提出了一种适用于数据融合方案的传感器监控系统校准方法,以提升系统检测性能。袁等人(2008)提供了一种基于数据融合模型的快速传感器布置算法。谭等人(2010b)通过与布尔感知模型进行比较,研究了数据融合对监视质量的影响。曹等人(2011)研究了在数据融合模型下传感器监控系统的最大寿命。谭等人(2013)提出了一种基于数据融合的质量驱动方法,用于检测高度动态的火山地震,其动态传感器选择算法旨在选择最小传感器子集来检测火山地震。不同于这些研究,我们利用随机目标的概率分布来增强对传感器监控系统的控制,并刻画网络寿命与系统可靠性之间的权衡。
3 预备知识
在本节中,我们提供了本文所使用的几个模型,包括传感器测量、数据融合和出现模型。传感器测量模型用于描述目标发出的信号衰减特性。数据融合模型采用值融合方案以提高传感器监视系统的性能。出现模型用于预测目标在若干关键位置出现的情况。表1总结了全文所使用的符号。
表1 符号说明摘要
| 符号 | 定义 |
|---|---|
| m, n | 传感器和监控位置的数量 |
| E | 目标信号的初始能量 |
| k | 路径损耗指数 |
| Si | 来自传感器 i, S= 的未受污染读数 $ \frac{E}{1+d^k} $ |
| ξ | 目标出现在位置集合中的事件的指示随机向量 |
| µ, σ² | 噪声能量的均值和方差 |
| ni | 传感器 i, ni ∼ N(µ, σ²) 感知到的噪声能量 |
| α, β | 误报率与检测率的边界 |
| N | 融合范围内的传感器集合 |
| |N| | 融合范围内的传感器数量 |
| Ti | 轮次 i 的持续时间 |
| Xij | 传感器 i 是否参与轮次 j |
| γ | 状态向量表示位置的覆盖状态 |
| p | 用户预定义的系统可靠性 |
| R | 传感器调度的总轮次 |
| Ci | 轮次 i 中的传感器集合 |
| Li | 传感器 i 的剩余寿命 |
3.1 传感器测量模型
传感器读数反映了物理信号(如光或声音)的强度,该强度随着到信号源位置的距离增加而按幂定律衰减。读数在很大程度上依赖于传感器与目标之间的距离。假设目标信号的初始能量为 E;目标与传感器之间的距离为 d;传感器的读数为 S,我们采用以下感知模型,该模型已在前期工作(Xing等人,2009;Tan等人,2010b)中被广泛使用:
$$
S = \frac{E}{1 + d^k}
$$
其中路径损耗指数 k 对于不同信号的取值范围为 2.0 到 5.0。
3.2 数据融合模型
本文采用数据融合方案来检测可能的目标。设 R 表示融合范围,即距离目标不超过 R 的传感器将参与决策。在实践中,融合范围内的传感器形成一个簇,并将这些传感器读数收集到簇头。簇头将传感器读数之和与检测阈值进行比较,以决定是否目标是否出现。在引入可靠覆盖的定义之前,我们需要描述基于误报率 PF 和检测概率 PD 定义的 $(\alpha, \beta)$ − coverage 模型。PF 表征了传感器由于环境噪声引起的误报警。PD 是当一个目标出现在某个位置(如点 q)时传感器的检测率,且 PD 通常写作 PD(q)。如果满足 $PF \leq \alpha$ 且 $PD(q) \geq \beta$ 的条件,则该位置 q 是 $(\alpha, \beta)$ − covered。在接下来的部分中,我们将给出 $(\alpha, \beta)$ − coverage 的数学描述。
设零假设 H₀ 表示目标未出现的假设,H₁ 表示拒绝 H₀。在假设 H₀ 下,融合结果等于 $\sum_{i \in N} n_i$,服从正态分布 $N(|N|\mu, |N|\sigma^2)$;在 H₁ 下,融合结果为 $\sum_{i \in N} n_i + S_i$,服从正态分布 $N(|N|\mu + \sum S_i, |N|\sigma^2)$。最后,$(\alpha, \beta)$ − coverage 的要求可写为:
$$
1 - \Phi\left(\frac{Thr - \mu|N|}{\sigma\sqrt{|N|}}\right) \leq \alpha,
$$
$$
1 - \Phi\left(\frac{Thr - \mu|N| - \sum_{i \in N} S_i}{\sigma\sqrt{|N|}}\right) \geq \beta,
$$
其中 $\Phi(x) = \frac{1}{\sqrt{2\pi}} \int_{-\infty}^{x} e^{-t^2/2} dt$,且 Thr 表示检测阈值读数。在保持误报率恒定并进行若干变换后,$(\alpha, \beta)$ − coverage 可等价地定义为:
$$
\frac{\sum_{i \in N} S_i}{\sigma\sqrt{|N|}} \geq (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha)).
$$
根据 $(\alpha, \beta)$ − coverage 的定义,我们可以给出可靠目标覆盖的正式定义如下:
定义1(可靠目标覆盖): 当目标可能出现的位置为 $(\alpha, \beta)$ − covered 时,我们将其定义为在该位置的目标被可靠覆盖。
3.3 出现模型
在实践中,目标的出现并非确定性的。出现模型用于描述在 n 个监控点 $P_1, P_2, …, P_n$ 处出现的目标的出现模式。我们首先将时间划分为时间间隔(例如一周),并考虑在一个时间间隔内的出现模式。为了表示目标是否出现在位置 $P_i$,我们定义指示变量 $\xi_i$ 如下:
$$
\xi_i =
\begin{cases}
1 & \text{targets appear at } P_i \text{ in a time interval} \
0 & \text{otherwise}
\end{cases}
$$
然后,目标在 n 个监控点的出现模式可以用随机向量 $\xi = [\xi_1, \xi_2, …, \xi_n]$ 表示。例如,当 n = 2 时,事件 {$\xi_1 = 1, \xi_2 = 1$} 表示在给定的时间间隔内,目标出现在 $P_1, P_2$ 个监控点。
设 $F_\xi : {0, 1}^n \to [0, 1]$ 表示 $\xi$ 的累积分布函数,即 $F_\xi(x) = P{\xi \leq x}$。
状态向量 x 在 $F_\xi(x)$ 中表示 n 个监控点当前的覆盖状态。例如,当 n = 2 时,状态向量 x = (1,1) 表示所有监控点都被传感器监控系统选择进行覆盖。实际上,累积分布函数中的 ≤ 可以解释为覆盖关系。因此,一旦给定覆盖状态 x,$F_\xi(x) = P{\xi \leq x}$ 就提示了在该时间间隔内目标被覆盖的程度。出现模式的分布可以通过利用历史统计数据对出现模式进行计数来计算。
4 问题描述
在本节中,我们首先描述传感器监控系统的场景,并对传感器监控系统中的可靠随机目标覆盖进行建模,然后简要证明最大寿命问题的NP完全性。
考虑到 m 个传感器 $s_1, s_2, …, s_m$ 被随机部署在一个监测区域中,且该区域内存在 n 个关键监控点 $P_1, P_2, …, P_n$。在实际应用中,我们可以将这些位置设想为关键区域的入口,或森林中森林火灾最可能发生的位置。传感器被部署在这些监控点周围以检测异常事件,并且每个监控点都配备了一个带有GSM模块的网关,能够直接与基站通信。该网关将传感器的报告转发给基站,并将来自基站的传感器调度信息分发给各个传感器。在接收到网关发送的调度信息后,传感器据此安排自身的激活/休眠间隔。一旦传感器监控系统检测到异常事件,网关将立即向基站报告紧急情况。
如第3节所述,借助历史统计数据可以获得目标在这些监控点于时间间隔内出现的概率分布 $F_\xi(x)$。我们需要以所需的可靠性对这些监控点进行监视,并且应尽可能长时间地维持系统可靠性。为了量化系统可靠性与网络寿命之间的权衡,我们正式定义系统可靠性与网络寿命如下:
定义2(系统可靠性): 对于整个系统,可靠性定义为概率 p,它表示在这些位置上的随机目标能够被(α,β)− covered 的程度。设二进制向量 x 表示由传感器集合覆盖的目标集合。如果传感器集合满足 $F_\xi(x) = P(\xi \leq x) \geq p$,则称在该时间间隔内,该传感器集合的系统可靠性至少为 p。
从分布函数 $F_\xi(x) = P(\xi \leq x)$ 可以看出,ξ 表征了随机目标在关键位置出现的随机性,而 x 表征了传感器监控系统的覆盖策略。系统可靠性 p 由最终用户在传感器监控系统运行前预先定义。p 可以解释为随机目标被传感器监控系统检测到的概率。为了表征系统可靠性能够维持多长时间,我们给出了网络寿命的定义。
定义3(网络寿命): 给定系统可靠性 p,网络寿命指的是传感器监控系统的起始时间与系统在时间间隔内无法维持所需系统可靠性 p 的结束时间之间的时间跨度。
在本文中,我们希望回答两个问题:如何高效地调度传感器集合以满足系统可靠性?在给定的系统可靠性要求下,最大网络寿命是多少?我们将在接下来的段落中给出最大网络寿命问题的等效数学描述。
传感器监控系统中的最大寿命问题已得到长期研究。然而,本文通过考虑随机目标和系统可靠性,推广了最大集合覆盖问题(卡迪等,2005)。我们以轮次方式调度传感器覆盖集。在每一轮中,选择一个合适的传感器集合以满足系统可靠性。假设最大轮次数量为 R,则每一轮的持续时间可分别表示为 $T_1, T_2, …, T_R$。根据第3节中描述的符号,我们将概率最大集合覆盖问题(PMSC)表述如下:
最大化
$$
\sum_{j=1}^{R} T_j
$$
受限于
$$
\sum_{j=1}^{R} X_{ij} T_j \leq L_i, \quad i \in {1, 2, …, m}, \tag{6}
$$
$$
P\left(\frac{\sum_{i \in V(k)} S_i X_{ij}}{\sigma\sqrt{|N_k|}} \geq (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha)) \cdot \xi_k, \forall k\right) \geq p, \quad j \in {1, 2, …, R} \tag{7}
$$
其中
$$
X_{ij} = 0, 1 \tag{8}
$$
这里我们对约束条件进行一些说明。公式(6)表示每个传感器的总工作时间不能超过其寿命。在公式(7)中,为简洁起见,我们用 ∀k 表示。令 Con_k 表示不等式
$$
\frac{\sum_{i \in V(k)} S_i X_{ij}}{\sigma\sqrt{|N_k|}} \geq (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha)) \cdot \xi_k
$$
∀k 实际上表示 Con₁, Con₂, …, Conₖ。联合概率质量函数 P(·) 中的部分关系 ≥ 可视为覆盖关系。V(k) 表示位置 k 的融合范围 R 内的传感器集合,而 ξₖ 是目标出现在位置 Pₖ 这一事件的指示随机变量。公式(7)意味着预定的传感器覆盖集应满足每轮次 j 所需的系统可靠性 p,这与定义4.1相对应。
由于最大集合覆盖(MSC)问题的NP完全性已被卡迪等人(2005)证明,我们希望了解 PMSC 问题是否存在多项式时间算法,遗憾的是,答案是否定的。我们有如下定理。
定理1(NP-Completeness): PMSC 问题是 NP 完全的。
证明: 首先,为了说明 PMSC ∈ NP,我们给出每轮的传感器覆盖集以及每轮持续时间。然后,我们可以很容易地在多项式时间内验证方程(6)–(8)是否满足。接下来,我们希望通过限制法来证明已被证实为 NP 完全的 MSC 问题是 PMSC 问题的一个特例。
当我们限制输入 p = 1 时,PMSC 问题在数据融合模型下等价于 MSC 问题。由于 MSC 在布尔感知模型中已被证明是 NPC,我们进一步将 PMSC 实例中的融合范围限制为 MSC 实例中的感知范围 SR。然后,我们可以为 α 和 β 分配适当的值,使得
$$
\frac{S_0}{(1+(SR)^k)\sigma\sqrt{|N|}} = \Phi^{-1}(\beta) - \Phi^{-1}(\alpha)
$$
成立。通过对 PMSC 实例施加这些限制,我们确保在每个目标的融合范围内,单个传感器即可满足不等式 $S_i/\sigma \geq \Phi^{-1}(\beta) - \Phi^{-1}(\alpha)$。由此得到的受限 PMSC 问题与 MSC 问题完全相同,证明完毕。
5 一种用于小规模网络的基于PSC的算法
在本节中,我们提出一种算法来解决 PMSC 问题。基本策略是分轮次调度传感器集合,在每一轮中选择最少数数量的工作传感器以满足所需的系统可靠性。该策略的目的是减少每个传感器集合覆盖中可能存在的冗余传感器数量。因此,PMSC 问题可简化为一个新的优化问题,即如何选择最少数量的传感器以满足系统可靠性。以第一轮为例,即 j = 1 在 Xᵢⱼ 中。该新问题可表述为:
最小化
$$
\sum_{i=1}^{m} X_{i1}
$$
受制于
$$
X_{i1} T_1 \leq L_i, \quad i \in {1, 2, …, m},
$$
$$
P\left(\frac{\sum_{i \in V(k)} S_i X_{i1}}{\sigma\sqrt{|N_k|}} \geq (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha)) \cdot \xi_k, \forall k\right) \geq p, \quad X_{i1} = 0, 1
$$
由于 α、β 以及传感器位置与目标位置之间的距离在传感器部署后是固定的,上述问题中的约束可以简化。为便于说明,我们设
$$
\lambda_{ik} = \frac{S_i}{\sigma\sqrt{|N_k|} (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha))}
$$
该约束可写为:
$$
P\left(\sum_{i \in V(k)} \lambda_{ik} X_{i1} \geq \xi_k, \forall k\right) \geq p, \tag{9}
$$
为了解决这个问题,我们需要引入一个二进制状态向量
$$
\gamma = (\gamma_1, \gamma_2, …, \gamma_n)
$$
用于表示位置 $P_1, P_2, …, P_n$ 的覆盖状态,其中 $\gamma_i = 1$ 表示位置 $P_i$ 需要被覆盖,我们可以将方程9修改如下:
$$
\sum_{i \in V(k)} \lambda_{ik} X_{i1} \geq \gamma_k, \quad k = 1, 2, …, n,
$$
$$
F_\xi(\gamma) \geq p. \tag{10}
$$
最小化
$$
\sum_{i=1}^{m} X_{i1}
$$
$$
\sum_{i \in V(k)} \lambda_{ik} X_{i1} \geq \gamma_k, \quad k = 1, 2, …, n, \tag{11}
$$
$$
X_{i1} = 0, 1
$$
最后,我们可以将该优化问题视为概率集合覆盖(PSC)问题(贝拉尔迪和鲁斯津斯基,2002)。解决此问题基本上有两个步骤:
- 枚举满足所需系统可靠性 p 的可能状态向量 γ;
- 求解以下混合整数二次规划问题以找到最小工作传感器集。
注意,不等式(11)是一个二次约束,我们将 |Nₖ| 松弛为目标 k 的融合范围内的传感器节点总数,记为 |N̂ₖ|。N̂ₖ 可表示为 |N̂ₖ| = | \sum_{i \in V(k)} X_{i1} |。由于 Xᵢ₁ 是二进制变量,我们ˆ ˆ可以推导出 |N̂ₖ| ≤ |Nₖ|。由于 |Nₖ| 是常数,在将 |N̂ₖ| 替换为 |N̂ₖ| 后,混合整数二次规划问题转化为 0‐1 整数规划。该 0‐1 整数规划问题如下所示:
最小化
$$
\sum_{i=1}^{m} X_{i1}
$$
$$
\sum_{i \in V(k)} \hat{\lambda}
{ik} X
{i1} \geq \gamma_k, \quad k = 1, 2, …, n, \tag{12}
$$
$$
X_{i1} = 0, 1
$$
其中
$$
\hat{\lambda}_{ik} = \frac{S_i}{\sigma\sqrt{\hat{|N_k|}} (\Phi^{-1}(\beta) - \Phi^{-1}(\alpha))}
$$
处理 0‐1 整数规划问题(ILP)的技术十分常见。我们将整数变量 Xᵢ₁ 转换为 0 到 1 之间的实变量。转换后,该问题转化为线性规划(LP)问题。由于线性规划的解并非整数线性规划的解,因此需要对线性规划的解进行“舍入”以获得整数线性规划的解。我们首先根据线性规划的解将 Xᵢ₁ 序列按降序排列
线性规划的解,然后按照排序后的序列依次添加传感器,直到满足不等式(11)为止。注意,我们使用不等式(11)而不是不等式(12)来检查所选的传感器是否已覆盖所有目标。由于我们已经获得了所选的传感器子集,因此可以精确计算 |Nₖ|,而使用估计值 |N̂ₖ| 和上界 |Nₖ| 的不等式(12)在判断传感器子集是否覆盖目标时过于严格。
通过求解上述建立的PSC问题,我们现在介绍该算法针对PMSC问题的完整过程。在每一轮中,我们首先选择满足系统可靠性要求的最小传感器集合。在每轮结束时,更新传感器的剩余寿命,并记录传感器监控系统的工作时间。当传感器监控系统无法维持所需的系统可靠性时,算法结束,并输出监控系统的寿命。伪代码见算法1。
最后,我们要提到的是,尽管在本文中,系统可靠性 p 由最终用户预先定义,并且在传感器集合的调度过程中保持固定。但在实践中,该算法可以很容易地扩展到最终用户在不同时间间隔调整系统可靠性 p 的情况。我们只需调整算法1的输入系统可靠性 p,并更新相应的输入即可。
6 一种用于大规模网络的有效算法
由于上述求解PSC问题的方法中,步骤1可能存在指数级数量的不同状态向量 γ,因此基于PSC的算法的时间复杂度可能很高。尽管贝拉迪和鲁施钦斯基(2002年)已经表明当组数(在本文中目标代表组)为中等规模时(<= 100),PSC问题可以被求解。但在最坏情况下,枚举所有不同状态向量的时间复杂度仍然是指数级的。我们转而采用一种具有合理时间复杂度的更实用的算法。
基本思想是在网络运行的每一轮中,通过选择出现频率较高的目标子集,以贪心的方式满足系统可靠性要求。具体而言,我们首先根据目标的出现概率按非递增顺序对目标进行排序。然后,通过逐一移除出现概率最小的目标,选择一个能够满足系统可靠性的目标子集。接着,对每个已选目标,将其覆盖的传感器按照到目标的距离以递增顺序排序。然后,通过逐个添加最近的传感器,选择一个足够的传感器子集,以覆盖所有已选目标。之后更新参数,开始下一轮。详细的伪代码见算法2。
所提出的贪心算法的时间复杂度可以这样分析。while循环在 R 轮次后终止。在每一轮中,两个排序步骤主导了时间复杂度。第一个排序包含 O(n log n) 个步骤,第二个排序针对每个目标进行,包含 O(|N| log |N|) 个步骤。综上所述,总体时间复杂度为 O(R ∗ max(n log n, n ∗ |N| log |N|)),显然是多项式复杂度。
7 性能评估
在本节中,我们进行了大量仿真来评估所提出的基于PSC的算法和贪心算法的性能。我们首先介绍仿真设置,然后展示通过更好地平衡系统可靠性与网络寿命,传感器监控系统的寿命得到了显著延长。我们通过调整系统可靠性、目标出现概率、目标数量和传感器数量等参数来评估所提方案的性能。当网络规模为100且目标数量为10时,我们比较了基于PSC的算法与贪心算法的性能。对于大规模网络(传感器数量为1000)且目标数量为100的情况,由于贪心算法的复杂度较低,仅给出了该算法的性能结果。
7.1 仿真设置
我们在Matlab中实现了第5节中的基于PSC的算法和贪心算法6。对于基于PSC的算法,由于其时间复杂度较高,我们将其实现限制在100个传感器均匀部署在 100 × 100 m 区域、且10个目标可能出现的位置在该区域内随机分布的场景。对于贪心算法,我们在包含100个目标和1000个传感器的场景中进行了仿真。我们采用与邢等人(2009)相同的参数设置,这些设置与真实实验一致。目标发射的信号 E 的初始能量设为5000,路径损耗指数 k 设为2。噪声的正态分布的均值和方差均设为1,融合范围 R 设为10 m。(5%,95%)覆盖被视为可靠目标覆盖。传感器的寿命 $L_1, L_2, …, L_m$ 从均值为1、标准差为0.3的正态分布中生成(由于不同的单位对仿真结果没有影响,因此我们不给出具体单位)。
正如我们在出现模型中提到的,可以通过收集每个时间间隔(如一周)内历史出现记录的统计信息来获得 ξ 的累积分布函数。然而,为了简化,在我们的仿真中假设每个监控位置在每个时间间隔内的目标出现遵循 [0, pr] 上的均匀分布。在我们的评估中,每次仿真重复50次。
7.2 系统可靠性与网络寿命之间的权衡
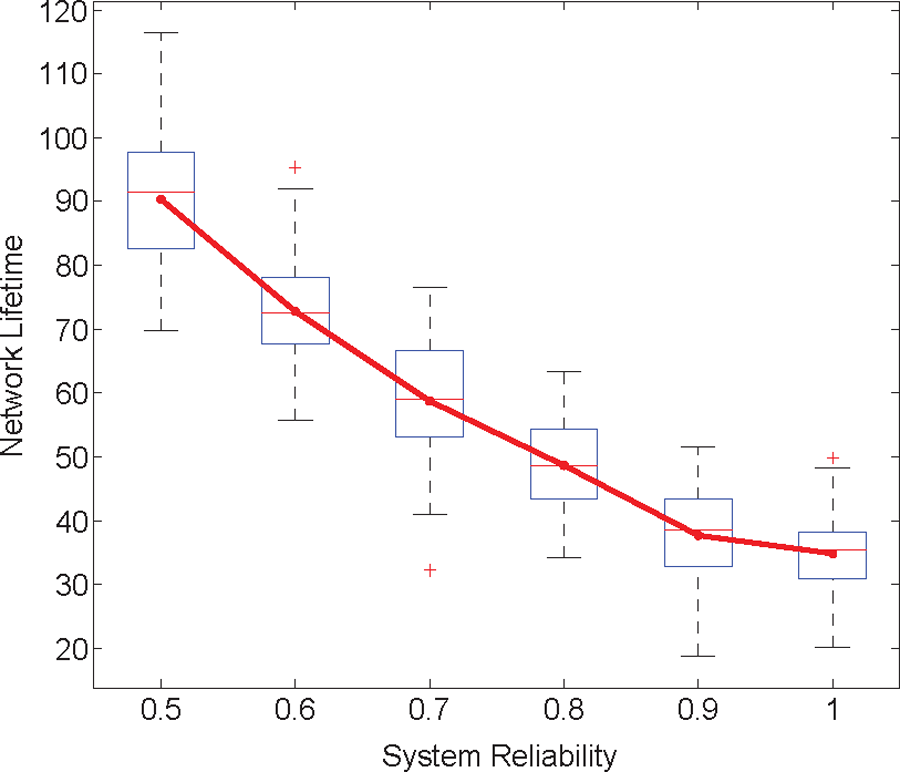
我们首先表明,所提出的基于PSC的算法和贪心算法均能捕捉系统可靠性与网络寿命之间的权衡。我们在图1和图2中分别给出了基于PSC的算法和贪心算法的仿真结果(其中 pr 固定为0.2)。显然可以看出,当系统可靠性要求从0.5提高到1时,网络寿命逐渐下降。另一方面,如果我们放宽对系统可靠性的要求,则可以提升网络寿命。例如,如果将系统可靠性从100%(确定性目标覆盖)放宽到80%(随机目标覆盖),使用基于PSC的算法可使网络寿命延长约40%(见图1)。类似地,使用贪心算法时网络寿命增加20%(见图2)。图1和图2中的两条曲线均为凸形,这
这意味着当系统可靠性逐渐降低时,系统寿命可以得到显著提升。网络寿命的改善大致可以通过图3来解释。
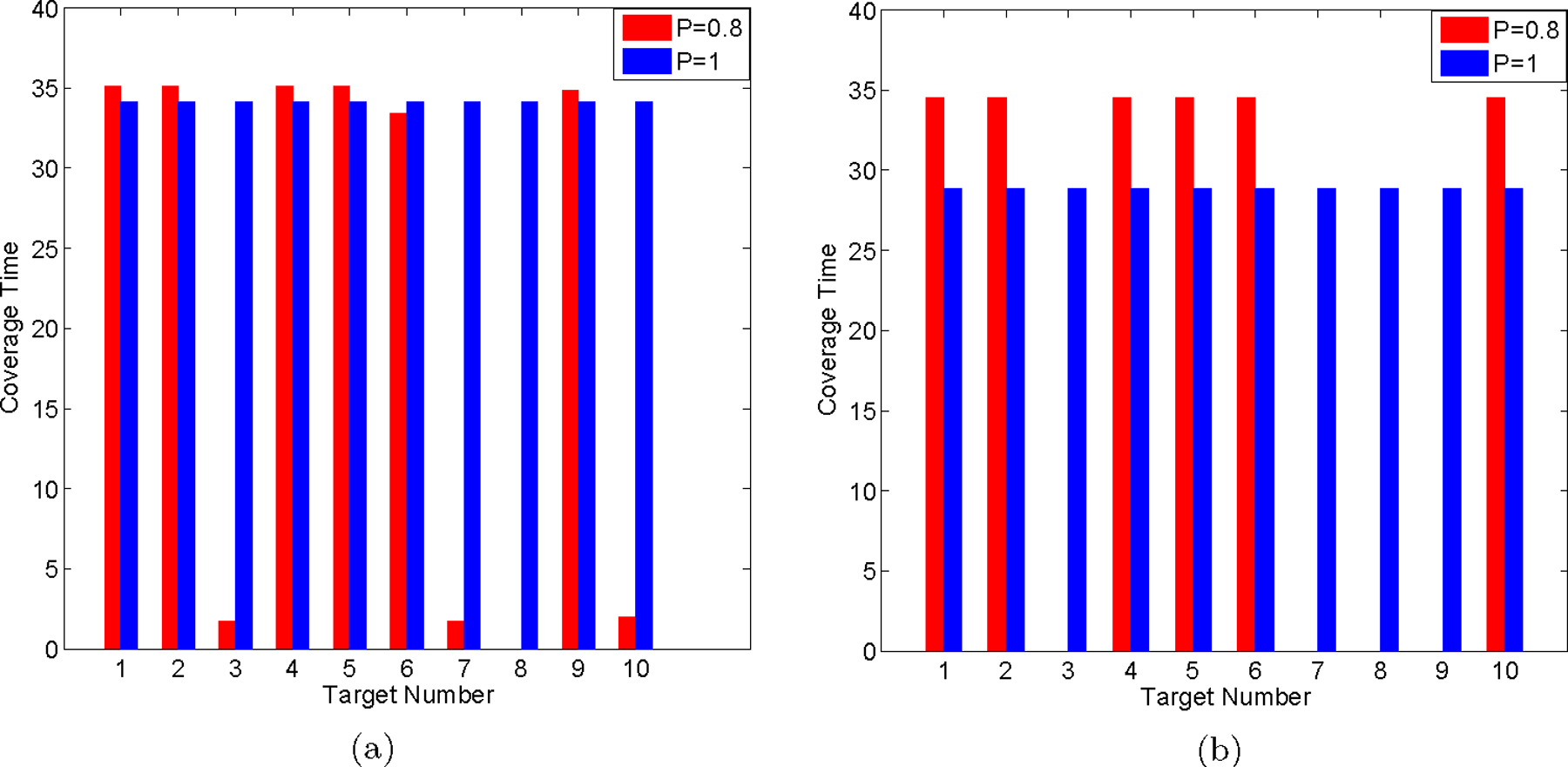
注意到根据表2中列出的出现概率,目标3和7出现的频率较低。因此,从图3可以看出,目标3和7的覆盖时间远少于其他目标。两种算法输出的解决方案在满足系统可靠性的前提下,会覆盖更可能频繁出现的一组子目标。相比之下,确定性覆盖方案则对每个目标都进行相同时间比例的覆盖。
7.3 目标出现概率的影响
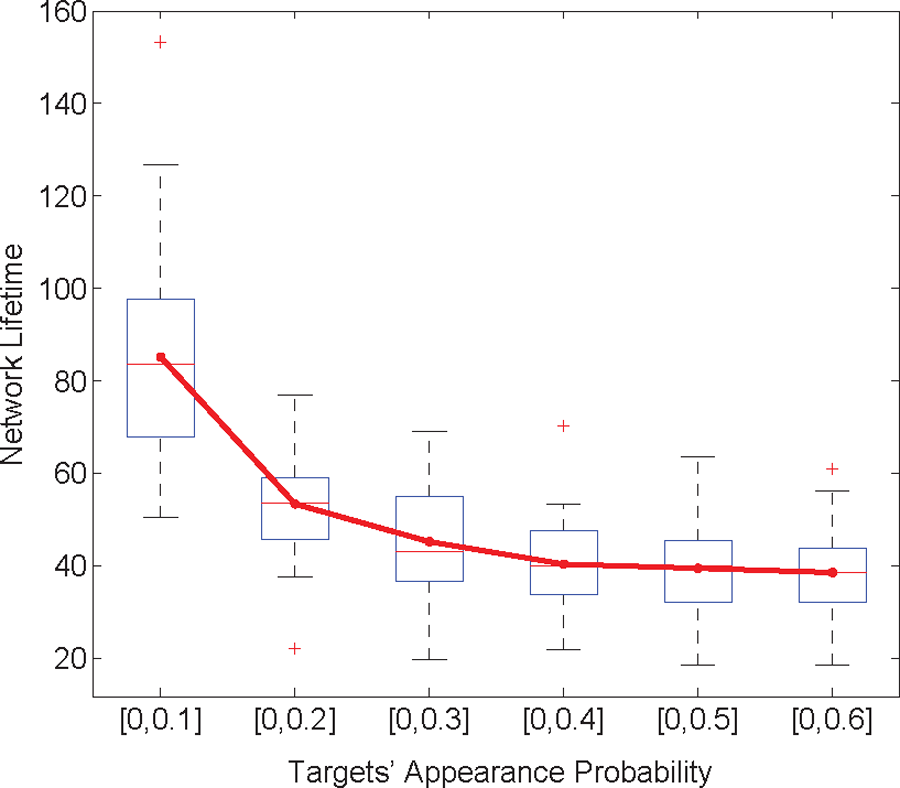
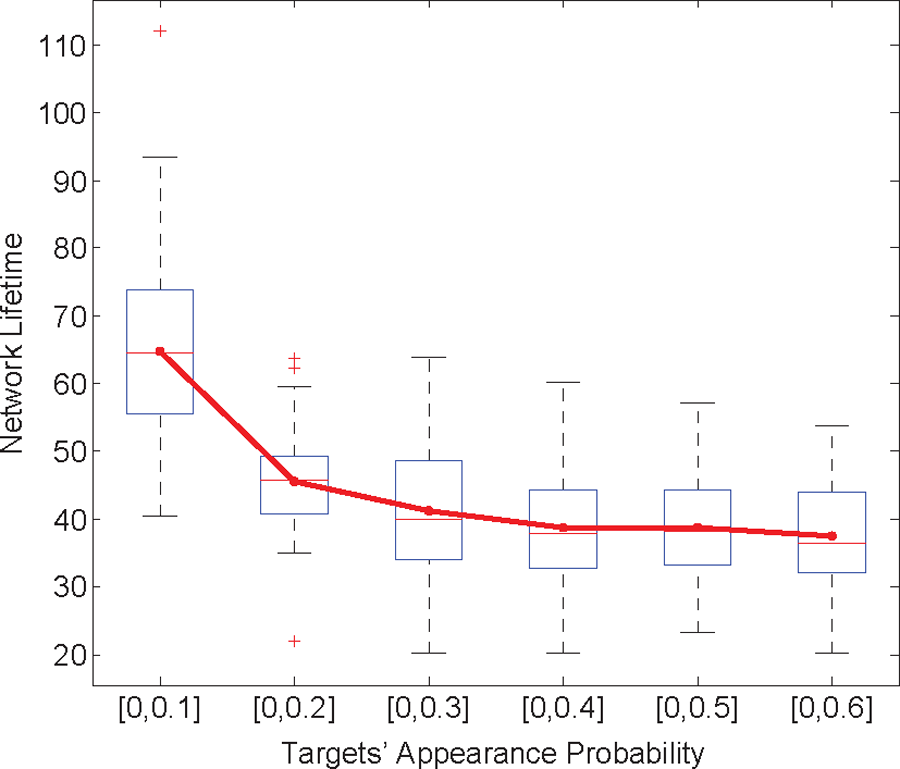
接下来,我们调整目标出现概率 $p_r$,并展示其对网络寿命的影响。在图4和图5中,我们给出了当目标出现概率变化时网络寿命的结果。
当系统可靠性固定在0.8时,目标出现概率的变化会影响网络寿命。在两个图中我们均观察到,当目标出现得越频繁时,网络寿命变得越短。这是因为当目标更频繁地出现时,覆盖这些目标会消耗更多的能量。换句话说,在给定的系统可靠性要求下,较低的目标出现概率可以延长网络寿命。
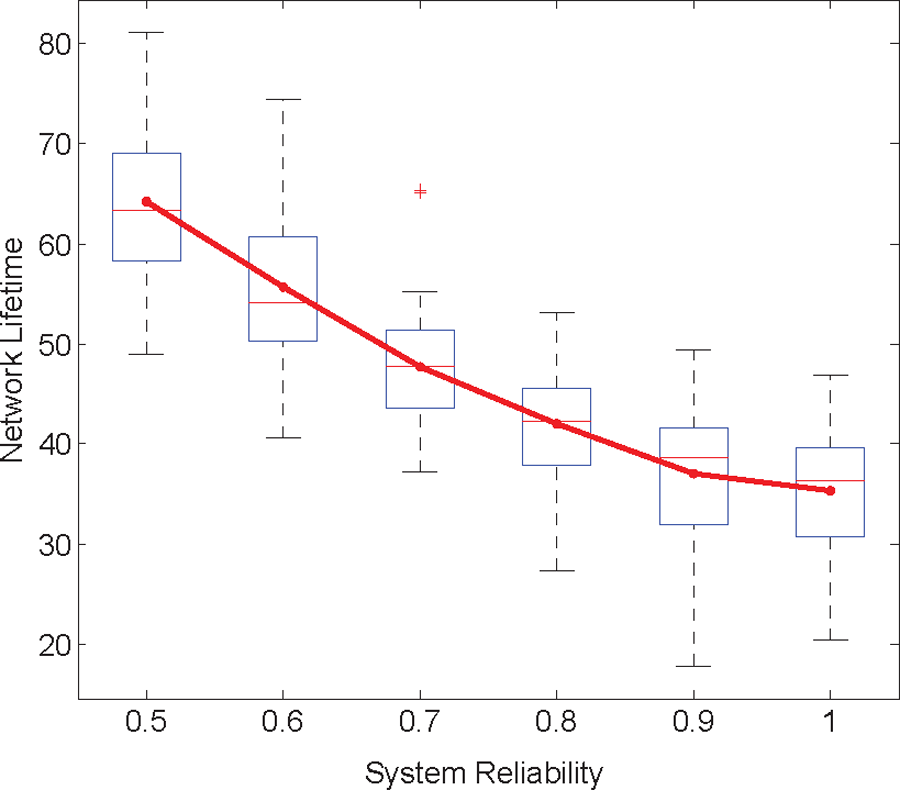
表2 目标出现概率
| Loc1 | Loc2 | Loc3 | Loc4 | Loc5 |
|---|---|---|---|---|
| 10.22% | 11.84% | 2.52% | 15.05% | 19.66% |
| Loc6 | Loc7 | Loc8 | Loc9 | Loc10 |
|---|---|---|---|---|
| 18.05% | 3.83% | 0.36% | 10.09% | 11.41% |
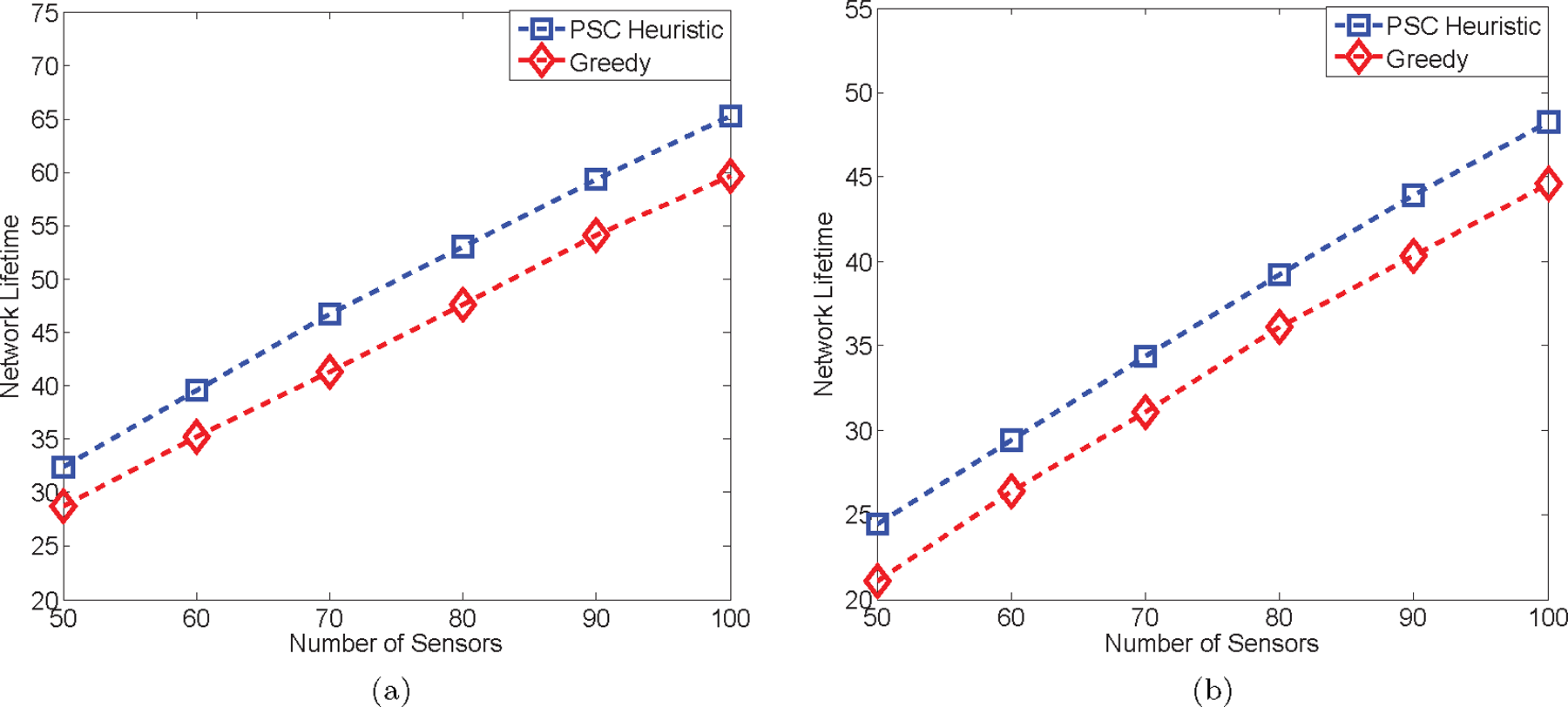
7.4 传感器数量和目标数量的影响
为了展示传感器数量和目标数量的影响,我们将传感器数量以10为间隔从50增加到100,并将目标数量在5到10之间变化。系统可靠性固定为0.8,pr固定为0.2。每次仿真重复50次,传感器和目标的位置均不同。图6显示,随着部署的传感器数量增加,网络寿命得以延长。
该现象可解释为:当传感器数量增加时,目标可能被更多的传感器覆盖,满足系统可靠性的潜在传感器子集数量也随之增加,从而延长了网络寿命。从图6可以看出,基于PSC的启发式算法比贪心算法性能提高10%–16%。
性能增益来自于基于PSC的启发式算法枚举所有最小目标子集,并通过线性规划选择一个最小传感器集合来覆盖最小目标子集中的某个目标子集。而在贪心算法中,算法根据传感器的出现概率逐个添加传感器以覆盖目标子集。所选目标集合中的目标被逐一覆盖,这意味着用于覆盖前面目标的传感器可能对覆盖后续目标没有帮助。在我们的仿真中,结合线性规划的基于PSC的启发式算法表现更优。
7.5 贪心算法在大规模网络中的性能
我们在大规模网络场景下评估了贪心算法在系统可靠性和目标出现概率方面的性能。结果分别如图7和图8所示。
在仿真中,部署了1000个传感器来监控100个目标。在图7中,我们观察到当每个目标的出现概率遵循均匀分布[0, 0.2]时,放宽系统可靠性要求可以改善网络寿命。在图8中,我们观察到当目标出现得更频繁时,消耗的能量更多,且在网络要求系统可靠性为0.8的情况下,网络寿命缩短。
7.6 实现问题
在实践中实施我们提出的解决方案时,应根据具体应用修改传感器测量模型。路径损耗指数 k 以及噪声能量的均值和方差 µ、σ² 应在实施前进行估计。此外,我们假设目标出现的分布可通过历史统计数据预测。如果目标出现的分布无法提前预测,则随机目标覆盖的优势将消失,必须覆盖所有目标。由于基于PSC的算法的复杂度在目标数量 n 上呈指数级增长,因此采用贪心算法在大规模传感器网络中采用更为合适。
8 结论
如何延长网络寿命是传感器监控系统中的一个重要问题。本文研究了在数据融合模型下的随机目标覆盖问题。考虑到传感器监控系统中对可靠性要求的不同层次,我们提出了一种新度量指标——系统可靠性,用于描述随机目标被覆盖的程度。基于系统可靠性,我们将随机目标覆盖问题形式化为PMSC,并提出一种基于PSC的算法来解决该问题。由于基于PSC的算法具有较高的时间复杂度,我们进一步提出了一种贪心算法来求解该问题。
通过大量仿真,我们从系统可靠性和目标出现概率两个方面评估了基于PSC的算法和贪心算法的性能。结果表明,当降低系统可靠性要求时,网络寿命可以得到显著提升。贪心算法在网络寿命方面优于基于PSC的算法,并且可用于大规模网络。

















 2245
2245

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









