



仿生学
神经工程中融合机器人技术与神经科学的挑战
神经科学的进步正在推动机器人技术的发展,反之亦然。
大脑建模
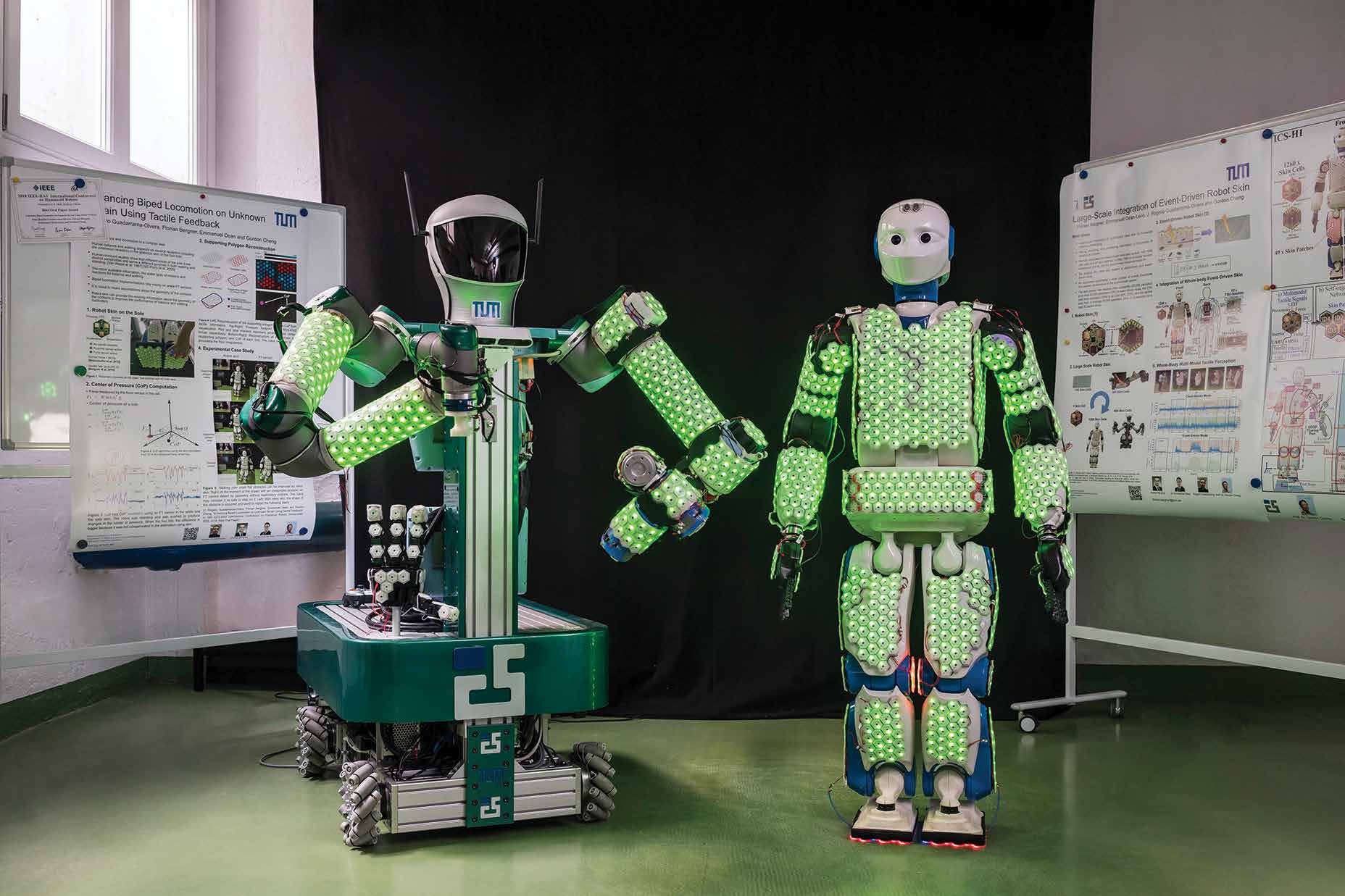
机器人专家正在利用神经科学的成果来制造性能更优的机器人。这种机器人技术与神经科学的融合体现了一种神经工程方法——一个新兴的研究领域,正将神经科学、机器人技术和人工智能结合起来。本文重点介绍了机器人技术与神经科学交叉领域的过去与当前观点以及未来的关键挑战(图1)。
已经开发出机器人平台来研究大脑功能和身体机制的各个方面,例如学习和感觉‐运动控制。从内耳工作过程的计算建模中获得的见解,使得能够模拟前庭‐眼反射功能(一种在头部运动期间稳定视线的神经反射机制)。模拟这些功能已促使采用更真实的神经启发模型来研究人类的平衡与双足运动,并已在具有50个自由度(DOFs)的人形机器人中得到验证(1)。这些发展还提升了复杂机器人的功能——例如高性能主动视觉感知、先进双足平衡、运动和操作能力——以及复杂任务的主动学习能力。最近的研究进展已成功将神经科学模型(例如用于稳健运动的中枢模式发生器(CPGs),如行走和奔跑)整合到机器人系统中。此外,这些模型的神经科学有效性也得到了验证。将机器人与神经科学研究相结合,有助于更好地理解从运动控制的神经机制到社会互动(3)等各种大脑功能。
基于神经科学的工程解决方案
神经形态电子学通过在设备上模拟神经学原理以实现类似人工神经系统功能,在计算、机器人感知和驱动方面已展现出优于传统工程解决方案的进展(4)。研究人员开发出一种配备类人敏感机器人皮肤的自主全尺寸人形机器人,该机器人利用神经事件驱动机制来处理触觉信息(5)。
脑控机器
脑机接口(BMIs)能够实现大脑对机器人的直接控制,从而恢复运动功能并探测大脑的神经回路(6)。这种脑机接口的双重用途为以闭环方式利用、研究和改变神经机制提供了一条统一的路径。
尽管脑机接口的主要目标是将代表运动意图的神经活动映射到由机器人执行的任务上,例如神经假体或外骨骼,但已有实例表明,基于脑机接口对机器人系统的直接控制已导致这些人工装置被整合进运动和躯体感觉皮层以及皮层下结构中的神经回路对人体的表征之中(6)。这指向了一种可能性,即复杂的(半)自主机器能够无缝地融入人体图式,超越已知的无生命工具的整合。除了直接控制假肢设备(6)外,脑机接口(BMI)在恢复丧失的感觉和运动功能方面也发挥了作用,例如用于中风引起的运动障碍患者(7)。即使是接受长期基于脑机接口控制外骨骼进行步态神经康复治疗的脊髓损伤截瘫患者,也观察到了部分感觉和运动控制功能的恢复(8)。这种前所未有的神经功能恢复表明,结合脑机接口与机器人技术在治疗迄今被认为不治之症方面具有巨大但尚未充分探索的潜力。
脑反馈以教导机器人
通过人类与机器人之间基于误差更新的闭环,在多个定义明确的任务中已展现出了任务层面的改进,例如在简化的上肢神经假体抓取任务中(9)。这些研究证明了可成功解码对误差敏感的脑信号,以使机器人行为适应人类期望。该方法为高效训练机器人开辟了未来前景,能够在无需专家显式编程每个任务的情况下融入并遵循人类习惯。在人机交互过程中,已证实机器人与人类能够持续地进行共适应。通过测量大脑的变化及其检测意外情况的能力,已表明调整机器人行为是可行的,这体现在新兴的人机协同策略触发了高效交互(10)。总体而言,这些研究为建立真正协同的人机交互奠定了基础。
未来挑战
闭环系统
对机器人提供适当反馈的闭环接口有清晰的理解,人类用户(除了其有效性之外)仍然缺失。这在大脑与机器人通过双向控制‐反馈回路融为一体的情境中带来了挑战。
进一步的挑战包括:(i)使用神经接口感知人类状态和意图将变得越来越困难,尤其是在需要对更多自由度进行实时神经解码的情况下,例如,超越当前可用于控制机器人的少数状态,实现更复杂、更精细的运动指令。神经校准的优化针对个体差异性脑活动的解码器提出了另一项挑战。(ii)向大脑提供反馈,以实现人类/大脑对机器人的无缝且自然的接受,这构成了巨大挑战,具体包括反馈的类型和方式、其空间精度,以及反馈时序(如反馈感觉延迟)和由人类和机器人运动引起的动态反馈调制。(iii)用于连续人机双向适应(超越任务级适应)的控制方案才刚刚开始出现。未来挑战包括人机与脑机交互回路的形式化及其在不同用例和应用中的推广。
一个真正逼真的功能模型
机器人专家将继续从神经科学中汲取灵感,以构建具有更高复杂度的高效率机器人,而神经科学家将进一步要求机器人专家提供逼真的模型作为研究工具。此外,面临的挑战还包括以下几点:(i)软体结构和混合机器人正在兴起,尽管如此与生物学相比,它们仍然较为初级。未来的挑战是构建更接近自然的真实平台。(ii)需要有可访问的平台,这些平台能够代表真实的模型,具有足够的可信度,并且足够简单,可用于神经科学研究。(iii)对于软体和混合结构机器人等高度复杂结构的感觉运动控制,也可以从神经科学中汲取经验。然而,将神经科学发现应用于机器人技术仍面临重要挑战,尤其是在解决机器人领域的大规模问题时,例如软体外骨骼的控制。

















 1238
1238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









