



基于 TI 提供的IWR6843 3D people counting,采用了基于人员点云高度变化判断跌倒的高效算法,可以在室内环境中检测出人员的跌倒。测试结果表明这一系统具有检测范围广,准确度高,反应快速的特点,能广泛应用在浴室,卧室,养老院等场景。
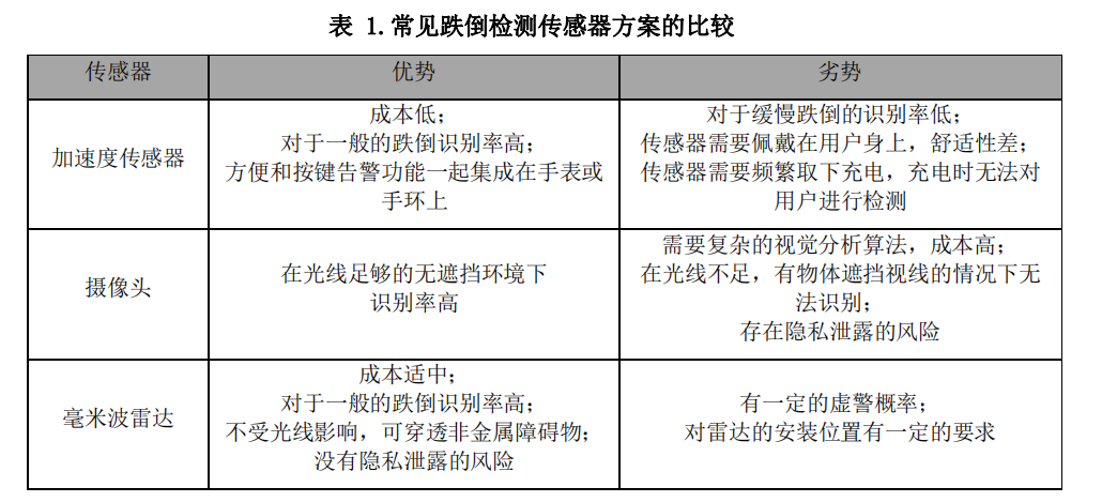
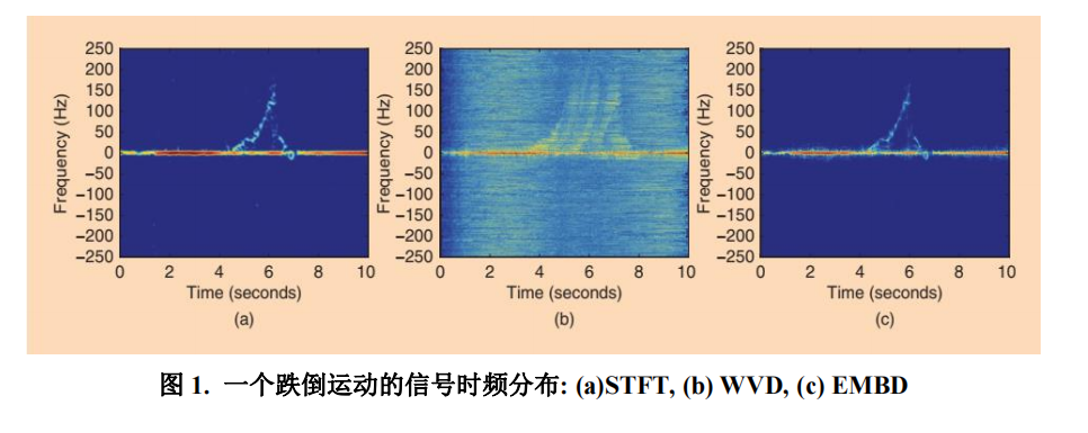
传统的雷达方案主要利用了人在跌倒过程中的速度变化特征(Doppler signature),首先对雷达回波信号进行时-频域的联合变换,然后从中提取出和跌倒有关的特征,最后通过模型分类器来判断是否跌倒。 人在跌倒的开始阶段有个短时间内加速的过程,当倒在地面上后又有一个长时间内减速的过程。
只通过速度信息来判断跌倒在某些场合的准确度并不高,比如人在房间内快速走路时的速度变化特征和跌倒就比较类似,很难通过分类器来区分。
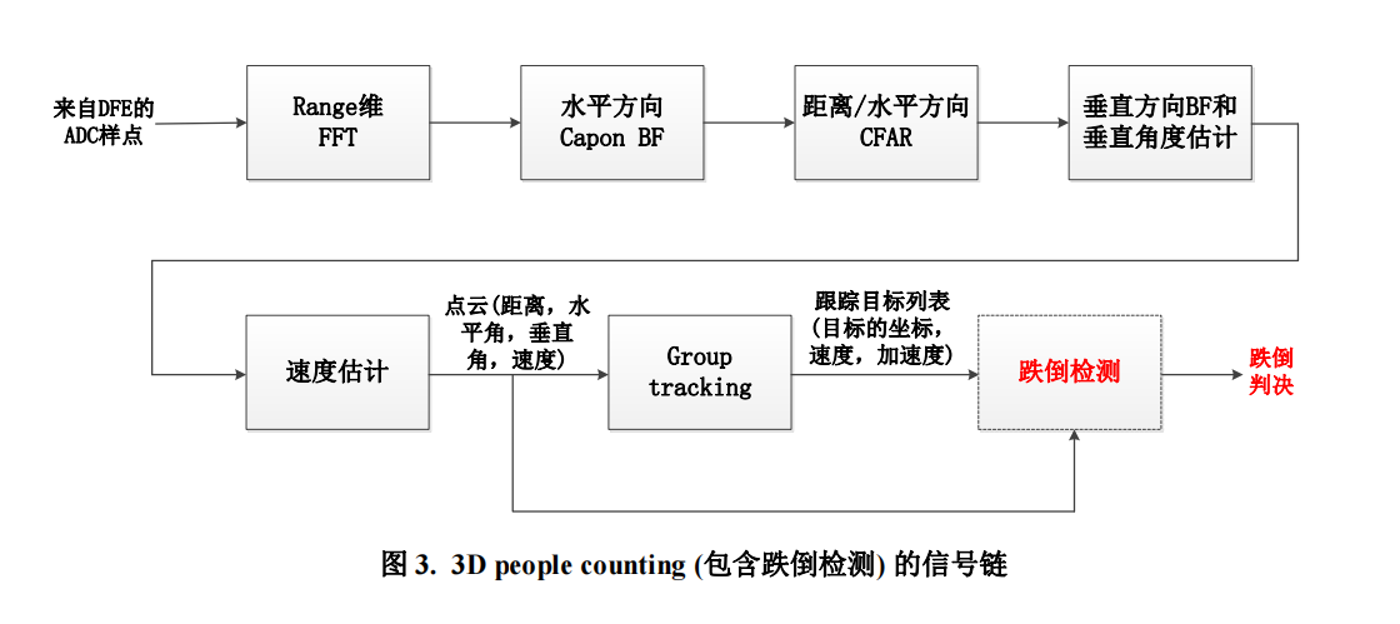
3D people counting 处理流程
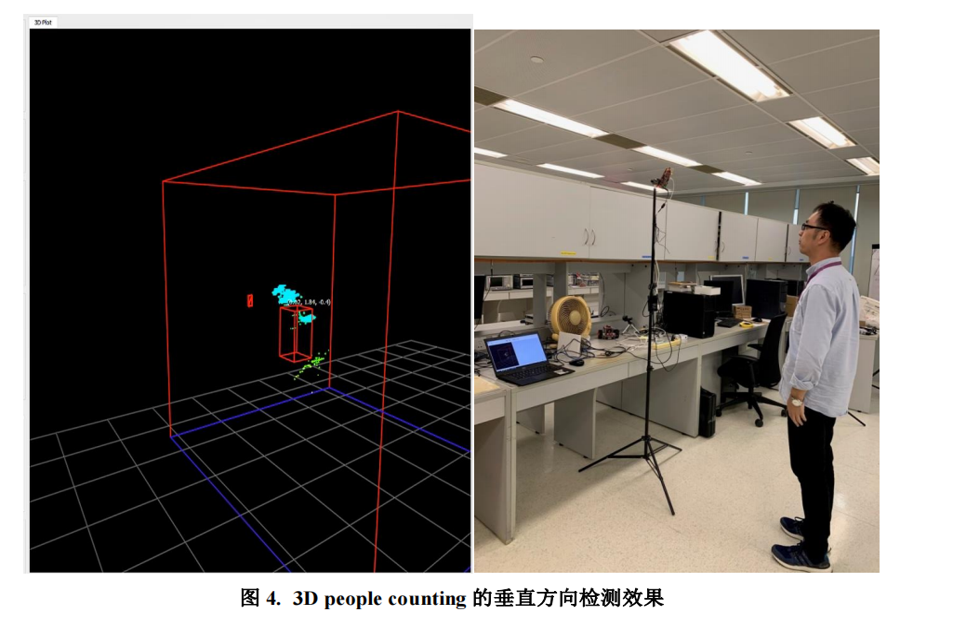
3D people counting 检测效果
对于室内距离雷达比较近的人员,3D people counting 的点云输出可以清楚地显示出人的轮廓。从这些丰富的点云信息中,我们可以提取出人的高度,并进行跌倒检测。 IWR6843 ODS 安装在2米的高度,下倾角30度。这样雷达的主波束斜向下能照射到成年人的头,躯干和脚,可以形成比较丰富的点云。
雷达需要有高的速度分辨率。通过速度信息来区别人和室内其他的静止物体 (比如桌子,床等),速度分辨率越高雷达就越容易把人从室内复杂的环境中提取出来,并生成更多的点云进行跌倒检测。
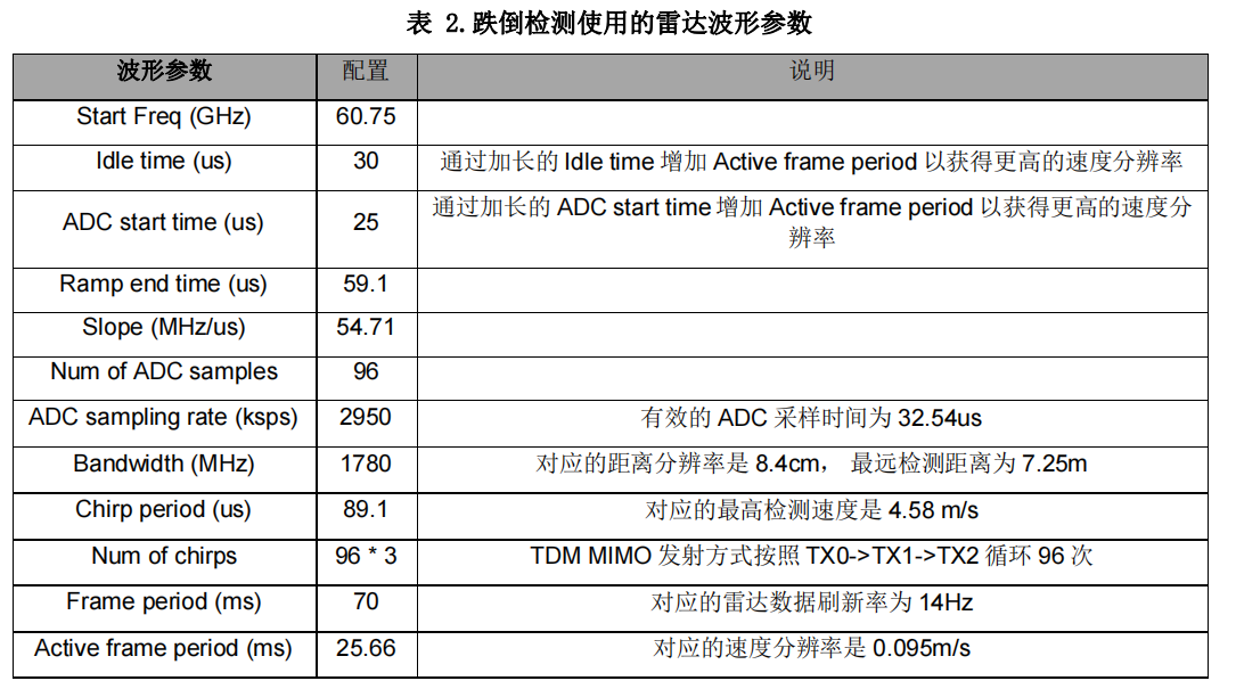
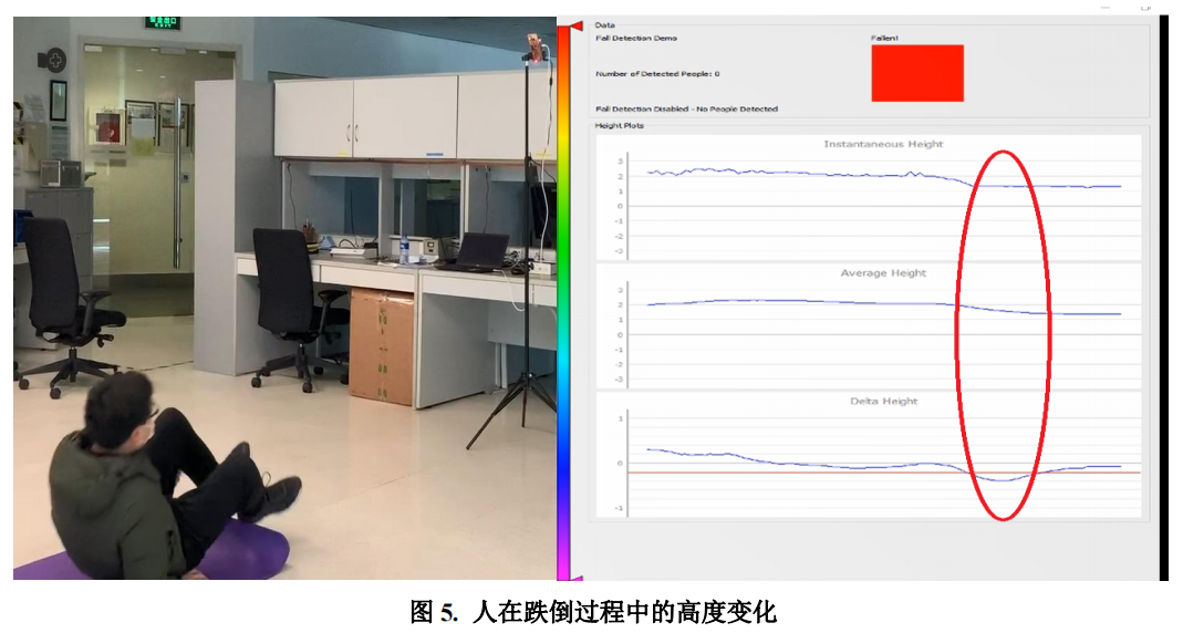
运行3D people counting,当人在雷达前运动的时候能够获得比较多的点云,可以计算出人的高度。人在跌倒的过程中,有一个高度快速下降的过程。当我们在获得了连续一段时间内人的高度信息后,通过比较人在不同时刻的高度差就能判断出有没有跌倒。
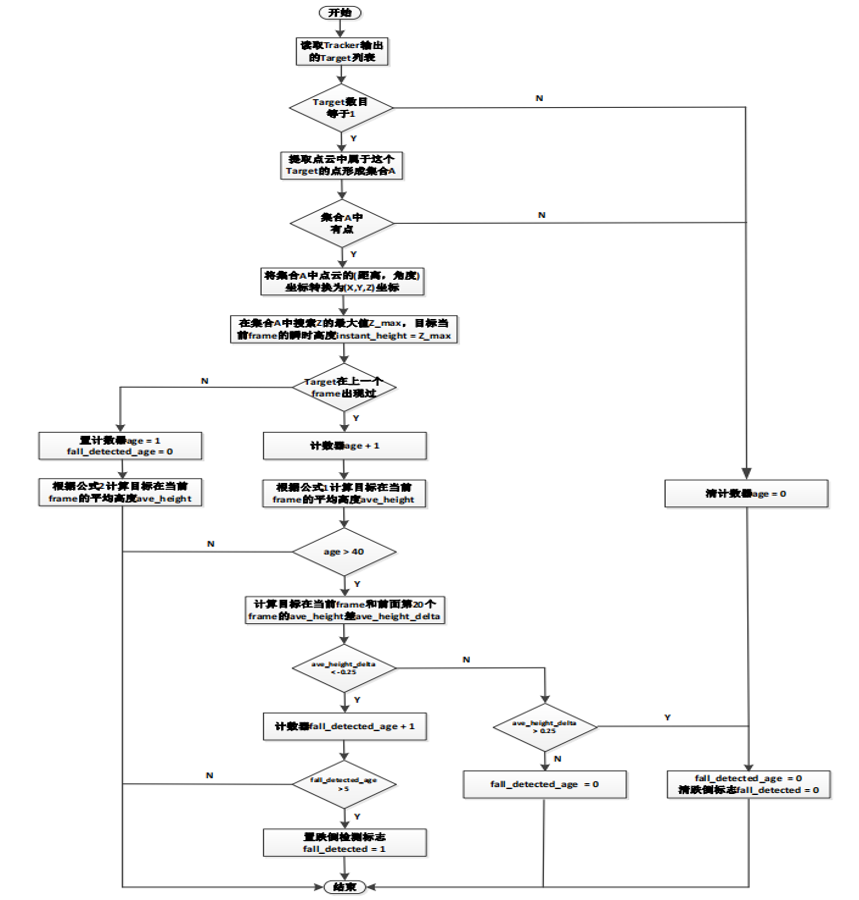
跌倒检测算法流程
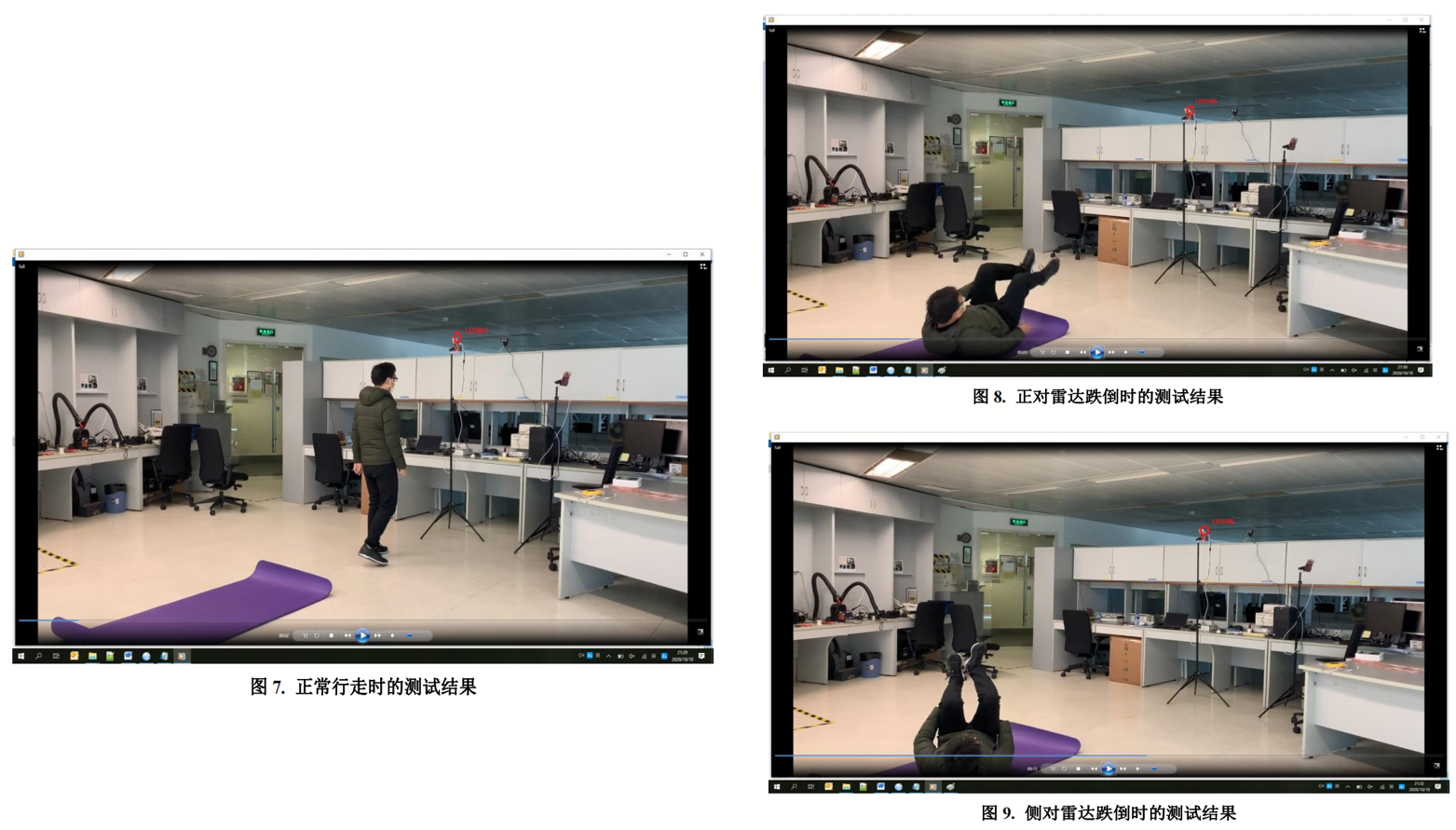
通过软件控制GPIO 闪烁 IWR6843 上的LED 灯,能直观地判断系统有没有检测到跌倒发生。


















 511
511

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











