






 本文详细介绍了如何在Ubuntu20.04上使用VMware配置ROSNoetic的环境,包括添加ROS软件源,设置密钥,安装过程,初始化rosdep,更新环境变量,安装相关工具以及验证ROS安装成功的步骤。还提供了遇到问题时的解决资源和Linux命令解释。
本文详细介绍了如何在Ubuntu20.04上使用VMware配置ROSNoetic的环境,包括添加ROS软件源,设置密钥,安装过程,初始化rosdep,更新环境变量,安装相关工具以及验证ROS安装成功的步骤。还提供了遇到问题时的解决资源和Linux命令解释。
(一)ROS安装
环境配置:VMware+Ubuntu 20.04+noetic
1.添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
这一步添加了ROS的软件源,其实相当于添加了手机软件管家,可以方便的下载ROS的各种软件包。
2.添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3.更新软件源
sudo apt update
4.安装ROS
sudo apt install ros-noetic-desktop-full
此处注意:ROS的版本和系统版本有直接关系,我的系统是Ubuntu20.04,对应ROS的noetic版本,因此 是 ros-noetic-desktop-full,如果是Ubuntu18.04,对应的ROS版本应是Melodic,安装的命令应该改为
sudo apt install ros-melodic-desktop-full
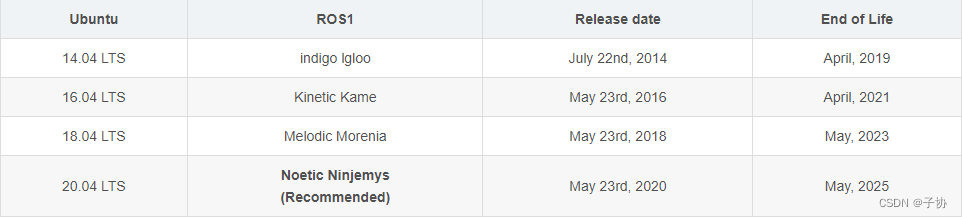
Ubuntu版本和ROS的对应关系图如下所示。
这里下载会很慢,可以考虑换源,换源教程可以看这个大佬的文章
5.初始化rosdep
sudo rosdep init
此处可能会出现很多错误,没事不要怕,已经有大佬有解决办法了,传送门。
6.更新rosdep
rosdep update
到这里如果没有报错的话,恭喜你已经完成了ROS的安装,但是还没有全部完成,还需要添加环境变量。
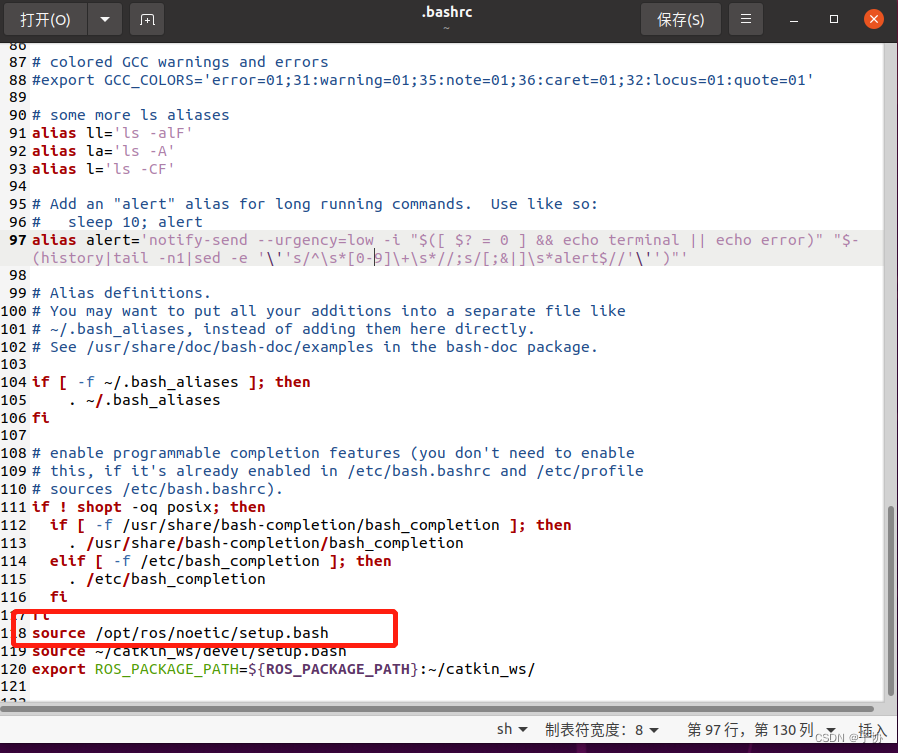
7.添加环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
这句话什么意思呢,首先echo ,我的理解就是打印,类似于C语言的printf,所以echo就相当于把后边的这句话source /opt/ros/noetic/setup.bash,打印到home目录下的 .bashrc 文件下,.bashrc文件又是什么,其实这个文件就是 终端,每次打开终端时,都会执行这个文件里边的内容,所以最终的效果就是 一打开终端都会执行 加载环境变量的命令,这样就省去了每次运行ROS都要输入加载命令的麻烦。具体的内容可以在 home下的.bashrc文件查看,当然一般情况下这个文件是不可见的,需要设置显示隐藏文件。
关于source命令我的理解是 执行一连串的 命令。所以source /opt/ros/noetic/setup.bash就是执行setup.bash这个脚本。
8.安装ROSinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
到这里ROS已经安装并配置好了,接下来测试一下有没有安装成功
9.验证ROS
roscore
这句命令是启动ROS,如果出现了下边这个界面,恭喜你安装成功了
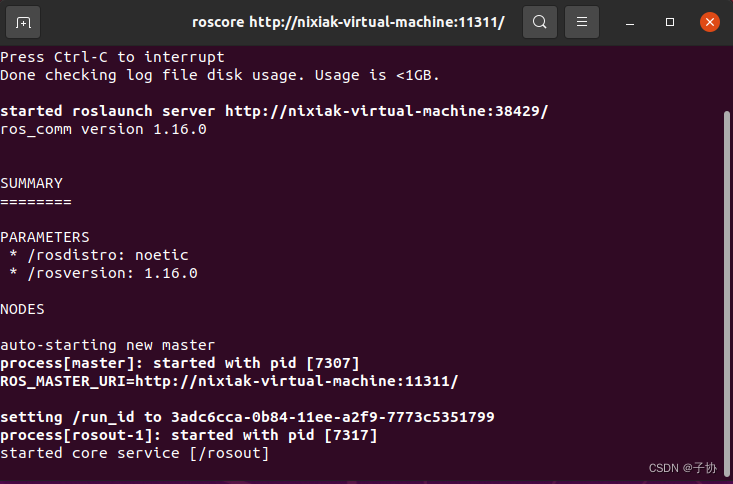
可以按 CTRL+C终止ROS的运行。
关于ROS的学习,推荐一个特别牛逼的博主,他的思路很清晰,并且很容易理解。传送门
关于linux下的一些命令含义:
sudo #暂时以root权限执行命令
sudo install ros-'ROS版本'-'软件包名' #安装某个ROS版本下的‘软件包’

















 10万+
10万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









