




硬件:VMware虚拟机
软件:Ubuntu18.04 ; ROS melodic
*************一个一个字手敲的,麻烦走过路过给个点赞,谢谢*****************
软件准备
在复现Fast-LIVO前需要解决mid360与虚拟机ubuntu18.04的连接问题,首先需要安装好VMware虚拟机,然后点击虚拟机->重新安装VMware Tools ,安装好后就可以自由的在主机和虚拟机之间复制粘贴内容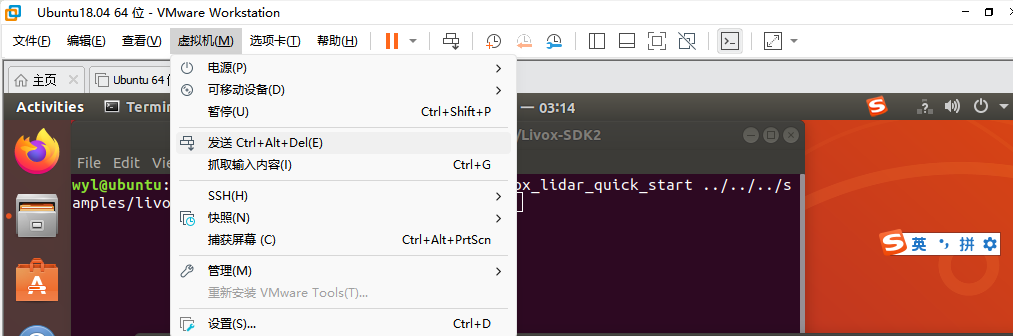
网络准备
一、虚拟网络编辑器
需要设置两个地方的网络,一是虚拟网络编辑器,关闭虚拟机的状态下,找到编辑->虚拟网络编辑器
弹出来
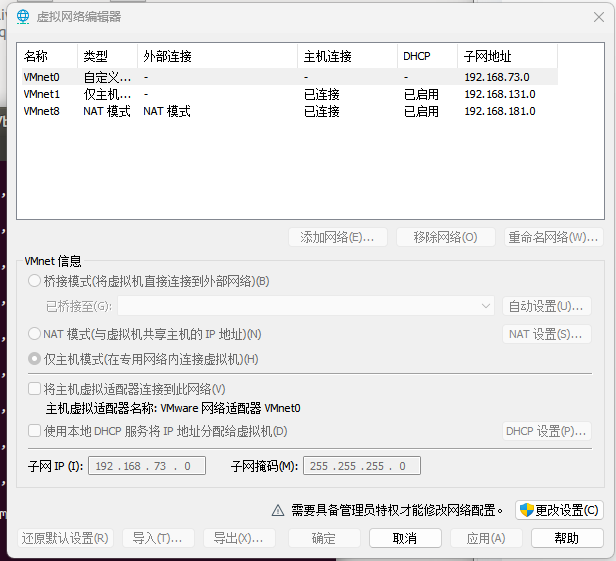
点击 更改设置 获得管理员权限,弹出来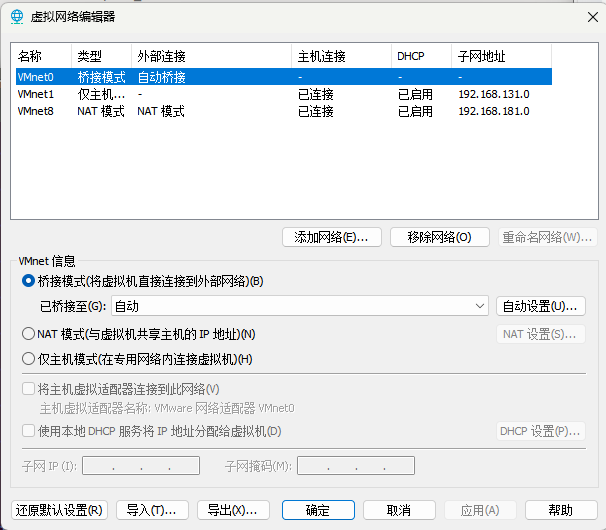
如果没有VMnet0,就添加网络,设置为桥接模式,已桥接至设置为自动,然后点击应用 确定即可
二、网络适配器
然后是关闭虚拟机的状态下,找到虚拟机->设置
在设置->硬件->网络适配器 选择 桥接模式 为网络模式,勾选复制物理网络连接状态,其余设置为如图所示
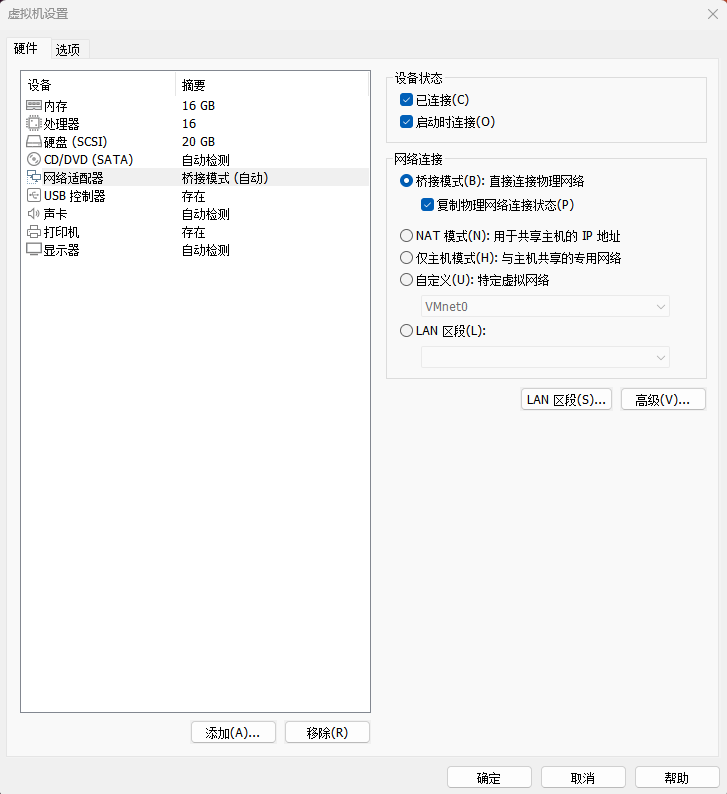
点击确定后
硬件准备
将mid360和一分三的mid360线材(这个买mid360厂家不会送,需要单独买)准备好,一分三的线材之一(网口线)连接至电脑主机,之二的两个头(红黑头)线材焊接至XT60的公头端子(需要网上购买),然后这个XT60的公头端子再插到一个3S航模电池(这个电池12V,适配mid360的9-27V电压范围,且电池自带XT60的母头端子)上给mid360供电 ,之三的暂时不用,关于一分三线材的线序需要问购买的线材厂家,因为每家都不一样。
虚拟机上Ubuntu18.04的设置准备
首先需要创建一个ROS工作空间,命名的话需要遵循ROS规范 安装好ROS(版本需要对应ubuntu的版本来安装,不可随意安装)
一、创建ROS工作空间
1. 安装 ROS(若未安装)
2. 创建工作空间目录
ROS 工作空间通常包含 src(源码)、build(编译输出)、devel(开发环境)等目录,按以下步骤创建:
# 1. 创建工作空间主目录(例如命名为 catkin_ws)
mkdir -p ~/catkin_ws/src
# 2. 进入 src 目录
cd ~/catkin_ws/src
3. 初始化工作空间
在 src 目录下通过 catkin_init_workspace 初始化,生成 CMake 配置文件:
# 初始化工作空间(仅首次创建时需要)
catkin_init_workspace
执行后,src 目录下会生成 CMakeLists.txt 链接文件,标志工作空间初始化完成。
4. 编译工作空间
回到工作空间根目录,使用 catkin_make 编译(首次编译会生成 build 和 devel 目录):
# 回到工作空间根目录
cd ~/catkin_ws
# 编译工作空间
catkin_make
- 编译成功后,会生成
build(编译中间文件)和devel(可执行文件、库、环境变量脚本)目录。
5. 设置环境变量
为了让 ROS 识别当前工作空间,需加载 devel 目录下的环境变量脚本:
# 临时生效(仅当前终端)
source devel/setup.bash
# 永久生效(每次打开终端自动加载)
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc二、下载编译安装Livox-SDK2
git clone https://github.com/Livox-SDK/Livox-SDK2.git
cd ./Livox-SDK2/
mkdir build
cd build
cmake ..
make -j
sudo make install三、下载编译Livox ROS Driver 2
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/Livox-SDK/livox_ros_driver2.git
#git不下来的去官网download然后解压
cd livox_ros_driver2
source /opt/ros/noetic/setup.sh #换成你自己的ros版本
./build.sh ROS1 四、主机配置静态IP
这里设置IP地址是需要注意一定要设置为192.168.1.50,不管你的电脑IP地址是啥都统一设置为这个,别问,问就是被坑过,按照下图设置好 手动 地址 子网掩码 网关 即可(DNS也需要设置为和网关一样即可)

然后在虚拟机的Ubuntu18.04里打开一个终端,输入命令ifconfig,下面inet需是上面的地址 192.168.1.50
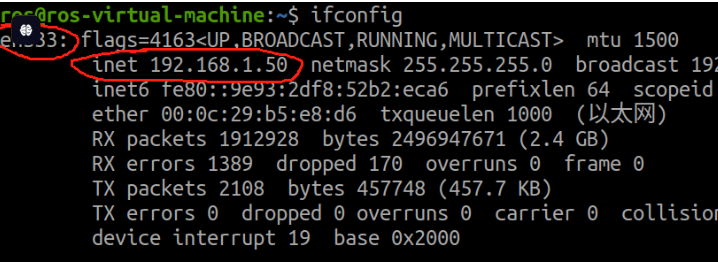
要是不对,则可输入下面命令修改(ens33可能有所不同,根据自己上面圈中修改)
sudo ifconfig ens33 192.168.1.50五、连接mid-360
六、修改livox_ros_driver2/config/MID360_config.json文件
修改livox_ros_driver2/config/MID360_config.json文件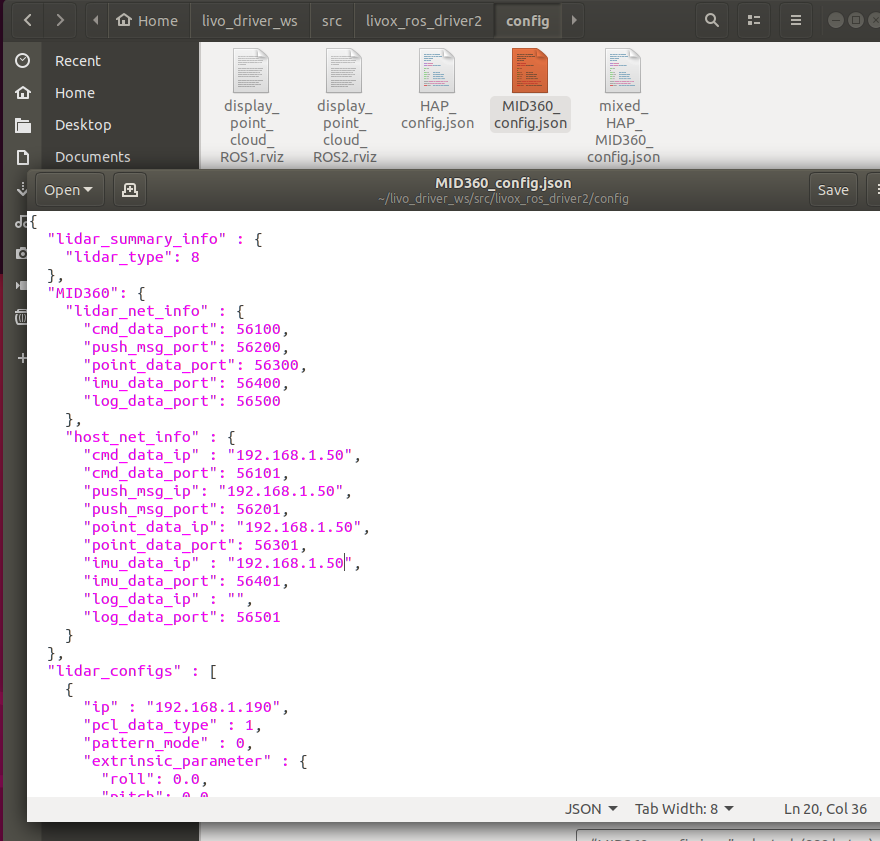
"host_net_info"字段,IP全改为192.168.1.50
"lidar_configs":ip改为192.168.1.1XX XX是mid360激光雷达二维码下面的一串数字的最后两位
七、修改LivoxSDK2/samples/livox_lidar_quick_start/mid360_config.json
修改Livox-SDK2/samples/livox_lidar_quick_start/mid360_config.json中的代码"host_ip" 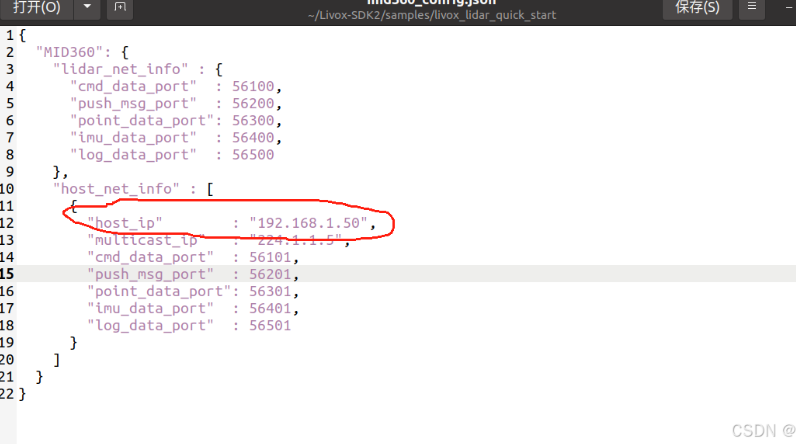
此时将雷达通电并与电脑连接,然后运行打开一个终端,运行下面代码
cd Livox-SDK2/build/samples/livox_lidar_quick_start
./livox_lidar_quick_start ../../../samples/livox_lidar_quick_start/mid360_config.json验证
如果运行出现如下,则检测设备成功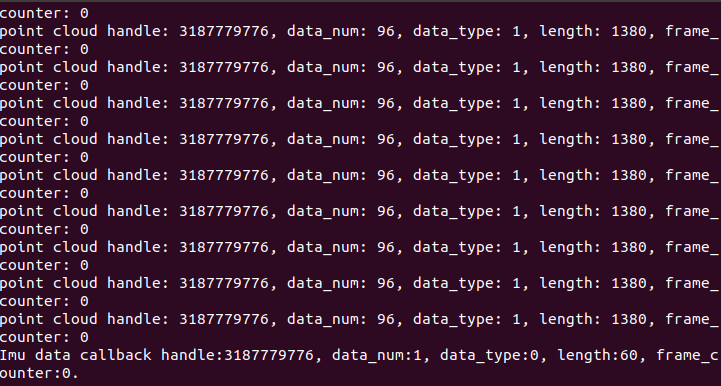


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









