







♥ 创作不易,如果能帮助到你的话留下👍和⭐吧,欢迎同方向研究学者交流学习
目录
1. Motivation
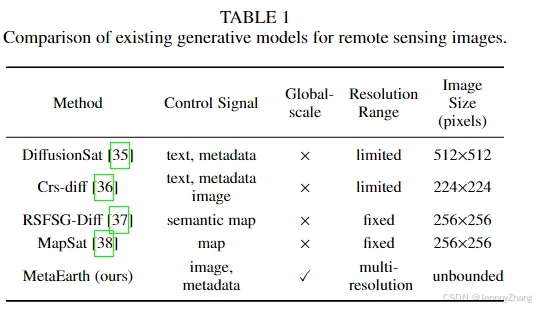
论文针对现有遥感图像生成模型的三大主要局限提出改进:
- 模型容量:现有模型难以生成包含多样地理特征(如城市、森林、冰川)的全球尺度遥感图像。
- 分辨率控制:很少有模型支持根据地理位置生成不同分辨率的图像。
- 无限制生成:传统方法难以无缝生成任意大小的连续图像,常出现拼接痕迹或不一致的问题。
2. Contribution
论文提出了一种名为 MetaEarth 的生成基础模型,解决了上述挑战。具体贡献包括:
- 分辨率引导的自级联生成框架,支持多分辨率和无限制图像生成。
- 提出了一种 新的噪声采样策略,在拼接图像块时保证视觉连续性。
- 构建了一个全球多分辨率遥感图像数据集,使模型能够适应未见过的场景。
- 展示了该模型作为数据引擎的潜力,可用于下游任务(如数据增强、分类和地球观测模拟)。
3. Method
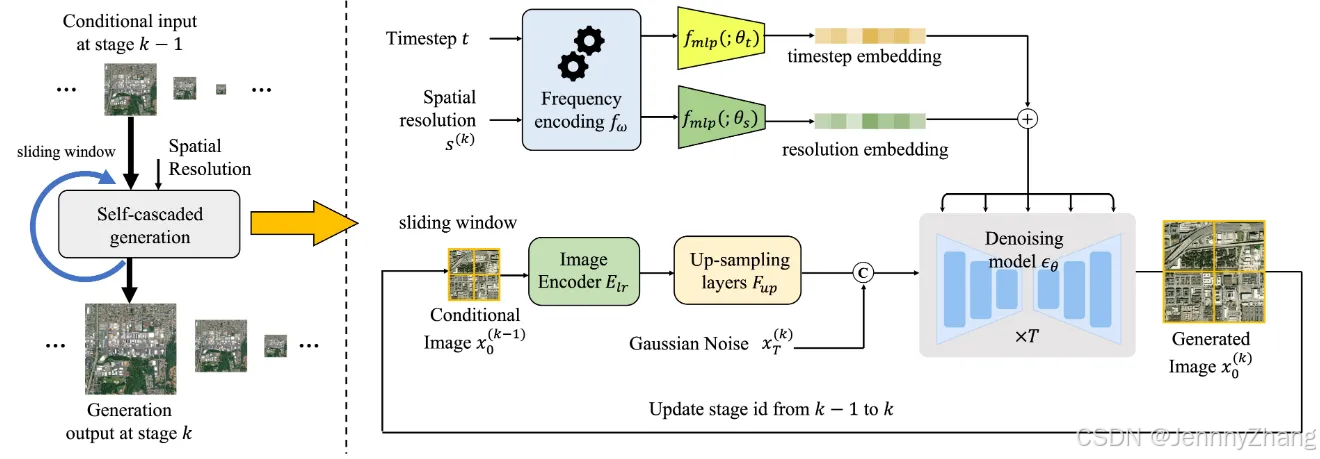
MetaEarth 使用 分辨率引导的自级联生成框架,分步骤从低分辨率生成高分辨率图像,方法包括:
- 条件嵌入:将空间分辨率和上一阶段生成的低分辨率图像作为条件输入,以生成更细致的图像。
- 噪声采样策略:通过在重叠区域共享噪声,保证图像块之间的无缝衔接。
- 滑动窗口生成:采用裁剪与拼接的内存高效方法,实现任意大小场景的生成。模型基于扩散模型框架训练,能够高效生成全球遥感图像。
3.1 回顾去噪扩散概率模型(DDPM)
DDPM 是一种基于扩散过程的生成模型,用于图像生成。它包含两个主要过程:
- 正向过程(Forward Process)
- 图像数据被逐步添加噪声,最终变为高斯噪声。
- 逆向过程(Reverse Process)
- 神经网络逐步对噪声图像进行去噪,以还原其原始内容。
- 通过逆向过程,可以通过迭代方式从噪声样本中生成高质量的图像,在许多图像生成任务中表现出色。
3.2 MetaEarth 自级联生成框架
核心思想
本文提出了一种 分辨率引导的自级联生成框架,用于生成不同场景和分辨率的图像。整个生成过程通过一个统一的生成模型递归地提升图像分辨率。
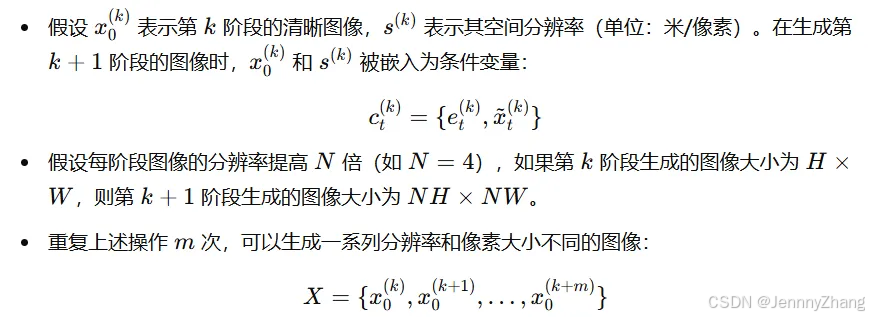
- 每个生成阶段以低分辨率图像及其对应的空间分辨率为条件,逐步生成高分辨率图像。
- 低分辨率图像 提供场景类别和语义信息,空间分辨率 则帮助模型感知和表示不同尺度下的图像特征。
生成流程
-
阶段间递归生成
-
**内存优化与无边界生成:**为降低内存和计算成本,设计了滑动窗口生成过程和噪声采样策略(详见第 3.3 节),以内存高效的方式生成连续、无边界的场景。
条件变量的处理
-
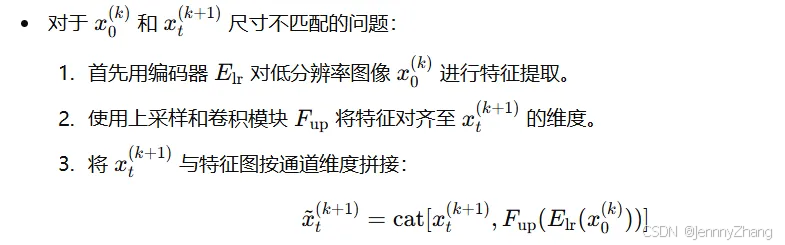
图像特征对齐
-
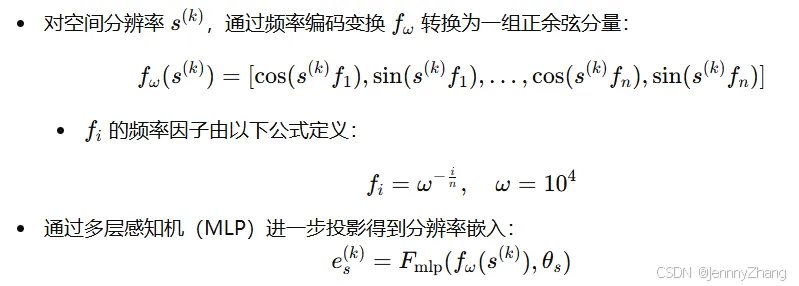
空间分辨率嵌入
-
时间步嵌入

-
最终嵌入向量

3.3 无边界图像生成
目标
为了生成任意大小的大规模遥感图像,本文提出了一种 无边界图像生成方法,包括:
- 内存高效的滑动窗口生成流程
- 噪声采样策略
这些方法旨在解决传统方法中图像块拼接时出现的明显接缝问题。
问题分析
图像拼接接缝问题来源于两个方面:
- 生成条件
- 在生成过程中,当模型的感受野超出图像边界时,生成的内容可能与相邻图像语义不一致。
- 解决方案:将图像块视为滑动窗口,并设置 1/2 的窗口区域重叠,将原本位于边界的像素置于中央位置。
- 重叠区域:充当相邻图像块之间的语义过渡区域,减少拼接过程中的语义不连续问题。
- 初始噪声采样
- 噪声采样的随机性会导致重叠区域的生成内容不一致,从而导致像素级别的错位问题。
- 解决方案:提出噪声采样策略,确保重叠区域内的生成内容相同或近似,保证像素级别的连续性。
方法设计
-
滑动窗口生成
- 图像块裁剪:在自级联生成框架中,将条件输入图像裁剪为一系列图像块,以控制内存开销在合理范围内。
- 重叠区域:裁剪时,图像块间设置 1/2 的重叠区域,重叠部分用于语义过渡。
-
确定性噪声采样策略
-
在条件扩散模型的逆向过程(去噪)中,采用 DDIM 的采样方法:
-
推导结果:
- 如果去噪网络的感受野小于重叠区域,并且重叠区域内使用相同的条件 cT(k) 和初始噪声 xT,则重叠区域中心生成的图像内容必定完全相同。
-
-
嵌套噪声条件
3.4 实现细节
3.4.1 去噪网络设计
-
分辨率设置
- 输入图像的分辨率在每次生成阶段增加 N=4 倍。
- 噪声调度:采用线性调度,范围从最小值 0.0015 到最大值 0.0155。
- 采样步数:
- 训练:设置为 1000 步。
- 推理:采用 DDIM 加速策略,步数减少为 50 步。
-
网络架构
- 使用类似 U-Net 的架构来预测噪声,总参数量约为 6 亿。
- 编码器和解码器:各由 5 个模块组成,特征图经过 4 次 2× 下采样/上采样。
- 通道数:每个模块的通道数以基通道数为基础,按比例 [1,2,4,8,8] 递增。
- 块设计:
- 每个模块包含 3 个 ResBlocks。
- 通道倍数为 8 的模块包含 AttentionBlocks。
- 条件编码器:使用 RRDBNet作为条件图像的编码器。
-
特征嵌入处理
3.4.2 训练细节
-
训练挑战
- 分辨率差异:高分辨率和低分辨率图像可能来自不同传感器,存在风格、内容和细节上的差异,导致配对图像不匹配。
- 分布偏移:在自级联推理过程中,模型的输入图像来自前一阶段生成结果,而训练时使用的输入数据与推理时的分布可能不同,可能导致生成结果失真。
-
高阶退化建模
-
损失函数设计
-
训练配置
- 框架:使用 PyTorch 实现。
- 优化器:AdamW,初始学习率为 2×10−6。
- 总训练轮数:30。
- 批量大小:每块 GPU 上的批量大小为 1,梯度累积为 8。
- 硬件配置:多 GPU 并行训练,基于 NVIDIA RTX 4090 GPU,总计消耗超 2000 GPU 小时。
- 初始化:从头训练,不加载预训练参数。
4. Experiment
论文通过定性和定量分析验证了 MetaEarth 的性能:
- 全球尺度图像生成:成功生成包含多种地理特征(如冰川、沙漠、森林等)的全球遥感图像。
- 多分辨率能力:可以生成不同分辨率的图像(如 4m/pixel 和 16m/pixel)。
- 任意大小图像生成:通过无缝拼接,避免了传统方法的拼接痕迹。
- 下游任务改进:在遥感图像分类中,使用生成数据进行数据增强显著提高了分类精度。实验表明,MetaEarth 在图像质量和生成效果上优于现有模型(如 Stable Diffusion 和 DALLE)。
4.1 实验设置
4.1.1 数据集
为了生成适用于全球任意区域的多分辨率遥感图像,本文构建了一个大规模数据集:
- 数据来源
-
从 Google Earth 中采集,涵盖全球不同纬度和经度的遥感图像,分辨率分别为 64m/pix、16m/pix 和 4m/pix,图像尺寸统一为 256×256 像素。
-
数据覆盖了几乎所有地理和环境条件,包括城市、森林、沙漠、海洋和冰川等。
-
- 数据清理
- 移除了高度重复的海洋图像,以避免过多相似数据对训练的影响。
- 删除了包含噪声或严重云层覆盖的图像。
- 最终数据量
- 手工筛选后,随机采样 1,000,000 张非重叠图像用于每种分辨率的训练,总计约 3,100,000 张图像。
- 另外随机采样约 140,000 张图像,划分为验证集和测试集(按 1:1 比例)。
- 版权声明
- 数据采集严格遵循 Google Earth 的版权和使用指南,并在论文被接收后删除了所有训练数据。
4.1.2 评估指标
为了评估生成图像的质量和多样性,本文使用了 Fréchet Inception Distance (FID)【72】作为指标:
- 指标定义
- FID 通过预训练深度卷积神经网络提取生成图像和真实图像的特征表示,并量化它们之间的相似性。
- FID 越低,表示生成图像与真实图像的相似性和多样性越高。
- **特征提取:**使用预训练的 Inception v3 网络【73】的最终平均池化层提取特征用于计算 FID。
4.2 质性分析
4.2.1 全球尺度图像生成
实验表明,MetaEarth 可以生成多种全球遥感场景,包括冰川、雪原、沙漠、森林、海滩、农田、工业区和住宅区等:
- 多样性和区域性:
- 在不同分辨率下,模型能够生成具有鲜明区域特征的逼真图像。
- 图 6 中展示了以低分辨率(256m/pixel)图像为条件输入,分别在美洲、欧洲和亚洲生成的城市图像,这些图像的区域风格与输入条件保持一致。
4.2.2 多分辨率图像生成
- 自级联生成框架使模型能够生成同时具备 空间分辨率多样性 和 内容多样性 的图像。
- 实验结果:
- 图 7 展示了从 256m 分辨率到 4m 分辨率逐步生成的图像,随着生成阶段的增加,图像细节更加丰富,内容多样性逐渐增强。
- 高阶退化模型的引入提升了模型对输入数据的泛化能力,使其能够利用生成图像作为输入生成更高分辨率的图像。
4.2.3 任意大小图像生成
- 图 8 展示了利用滑动窗口生成的大规模高分辨率图像:
- 尽管采用逐块生成方法,但生成结果中地形特征在图像块间保持连续性。
- 噪声采样策略与窗口重叠设计 显著缓解了图像拼接中的视觉不连续问题,实现了无缝的大规模图像生成。
4.2.4 未见条件下的泛化能力
MetaEarth 在未见场景下也表现出强大的泛化能力:
- 实验 1:虚拟星球 "潘多拉"
- 使用由 GPT-4V 生成的“潘多拉星球”低分辨率地图作为条件输入,逐步生成更高分辨率的图像(图 9)。
- 模型生成的图像展现了合理的地表覆盖分布和逼真的细节。
- 实验 2:卫星图像多分辨率生成
- 使用 Sentinel-2 卫星的真实遥感图像作为低分辨率输入,生成多分辨率图像(图 10)。
- 生成结果在保持传感器成像风格的同时,展现了不同分辨率下的区域特征。
- 结论:即使训练数据不覆盖这些场景,MetaEarth 仍能生成语义合理、风格独特的高质量图像。
4.2.5 与其他文本生成图像模型的比较
- 与 Stable Diffusion、DALLE 和 Ernie 等主流生成模型相比:
- 优势:
- MetaEarth 在图像真实感和场景布局合理性方面明显优于对比模型(图 11)。
- 对分辨率的敏感性更强,能够准确生成多分辨率图像和无边界场景。
- 原因:
- 其他模型在训练阶段缺乏相关遥感数据,难以捕捉分辨率与图像内容的对应关系。
- 优势:
4.3 消融实验
4.3.1 自级联生成框架的必要性
- 对比方法:直接生成最高分辨率图像(4m 分辨率),然后逐级下采样生成低分辨率图像。
- 实验结果:
- 图 12 显示,自级联生成方法生成的图像在语义清晰度、特征轮廓和布局合理性方面明显优于直接生成方法。
- 问题分析:
- 直接生成方法中,低分辨率条件图像提供的结构和语义信息不足,导致:
- 难以生成清晰的特征和合理的布局。
- 生成结果更多依赖初始噪声,条件图像影响较小。
- 无法实现语义连贯的大规模图像生成。
- 直接生成方法中,低分辨率条件图像提供的结构和语义信息不足,导致:
- 结论:自级联生成框架是必要的。
4.3.2 分辨率引导的有效性
- 设计:移除分辨率嵌入分支(频率编码和 MLP),保留其他结构,比较两种模型生成质量。
- 实验结果:
- 表 3 显示:使用分辨率引导的模型在大多数场景下 FID 更优,尤其在真实输入复杂分布中优势显著。
- 例外情况:
- 南半球的生成质量略有下降,这是因为南半球土地类型(如沙漠和森林)在不同分辨率下变化较小。
4.3.3 噪声采样策略的评估
- 对比方法:在有/无噪声采样策略下比较生成块拼接处的连续性。
- 实验结果:
- 图 3 和表 4 显示:
- 采用 窗口重叠 和 噪声约束策略,生成图像在拼接处更平滑,梯度值更小。
- 噪声采样策略有效提高了视觉质量和拼接连续性。
- 图 3 和表 4 显示:
4.3.4 高阶退化操作的必要性
- 对比方法:将简单下采样(双三次插值)与高阶退化策略进行对比,用于训练从 16m 到 4m 分辨率的生成过程。
- 实验结果:
- 图 14 显示:
- 简单下采样生成的图像模糊且质量差。
- 高阶退化策略生成的图像更清晰,FID 更优(表 5)。
- 结论:高阶退化增强了模型对真实数据的适应能力,使其适用于自级联框架。
- 图 14 显示:
4.4 下游任务评估
MetaEarth 的应用场景
MetaEarth 作为一个强大的数据引擎,可以生成高质量的训练数据,为下游任务提供支持,具体包括:
- 数据增强:通过降采样和上采样生成多样化数据,缓解分类任务中因数据不足或稀疏导致的性能问题。
- 混合场景合成:将真实目标与虚拟背景结合,尤其适用于包含稀缺目标的目标检测任务。
- 深伪检测:利用 MetaEarth 生成的全球范围、多分辨率图像增强深伪检测模型的泛化能力,帮助区分真实和伪造数据,保障地理信息系统的安全性。
遥感图像分类任务实验
为了量化 MetaEarth 在下游任务中的应用效果,我们选择 遥感图像分类 作为测试场景:
- 数据集:
- 包含 7 个遥感场景类别:海滩、沙漠、农田、森林、工业区、山地和住宅区。
- 每类约 150 张 256×256 分辨率的图像,总体从 MetaEarth 生成的全球 4m/pix 分辨率数据集中重新采集。
- 训练集与测试集按 3:1 比例 划分。
- 分类模型:选择四种模型进行实验:
- VGG19【74】
- ResNet34【75】
- ViT-B/32 和 ViT-B/16【76】
- 实验流程:
- 首先在原始数据集上训练四个基线模型。
- 使用 MetaEarth 生成的数据将训练数据扩充至原始数据的 5 倍,将扩充数据与原始数据混合后重新训练模型。
- 数据增强方法:对训练数据降采样后,利用 MetaEarth 生成多样化的图像。
- 实验结果:
- 表 6 显示了不同模型在测试集上的分类准确率:
- 使用数据增强的模型分类准确率均有显著提高。
- 结论:MetaEarth 生成的数据具有高质量和多样性,为数据不足场景下提供了低成本的有效数据支持。
- 表 6 显示了不同模型在测试集上的分类准确率:
4.5 ⭐Limitations
存在问题
目前,MetaEarth 在生成小目标(如飞机和船只)方面表现较差:
- 实验现象:图 16 显示了模型生成失败的案例,这些小目标的形状几乎完全丢失,特征难以辨认。
- 原因分析:
- 最高训练分辨率为 4m/pix,在此分辨率下,小目标占用的像素极少,导致严重的数据不平衡问题。
- 训练中,模型更多关注背景模式,而难以准确捕捉小目标的特征。
5. Future work
作者提出了一些改进方向:
- 更高分辨率生成:解决目前生成小目标(如飞机或船只)细节不足的问题。
- 多模态数据生成:扩展至其他遥感数据类型(如多光谱数据或高程模型)。
- 生成世界模型:将 MetaEarth 作为基础,用于构建动态交互环境(如无人机、卫星的模拟场景)。
1MetaEarth 的数据引擎潜力
MetaEarth 不仅可以作为数据增强的核心工具,还在构建 生成式世界模型 中展现了巨大的潜力:
- 生成式世界模型的意义:
- 世界模型是实现通用人工智能(AGI)的关键路径,为智能体的感知、决策和进化提供训练与测试环境。
- 如 OpenAI 的 Sora 模型 等,已经将研究重心转向生成式世界模型领域。
- 生成式世界模型的特点:
- 通过生成过程理解世界,通常结合大语言模型、视觉基础模型和图像/视频生成技术。
- MetaEarth 作为一个生成基础模型,能够从俯视角度模拟地球的视觉效果,为生成式世界模型提供新的可能性。
MetaEarth 的独特贡献
- 高分辨率与多分辨率能力:生成具有高分辨率、不同分辨率和无边界的遥感图像。
- 动态环境模拟:
- 给定虚拟视角的高度和移动路径,MetaEarth 可以生成并预测超出当前场景范围的内容。
- 支持构建带有动态交互行为的虚拟环境。
- 应用场景:
- 城市规划:提供高分辨率场景模拟,帮助城市基础设施设计和优化。
- 环境监测:动态生成多分辨率图像,辅助森林保护、污染监控等任务。
- 灾害管理:快速生成灾害场景,用于应急训练和优化救援决策。
- 农业优化:为农业场景生成数据,支持种植结构调整和产量预测。
航天智能领域的前景
- 在航空航天遥感领域,生成式世界模型将成为重要的研究趋势。
- MetaEarth 的研究方法为此方向提供了宝贵的启示和框架:
- 通过动态生成环境,支持智能无人机、遥感卫星等智能体的训练、测试与验证。
- 为航空航天遥感生成式世界模型的发展奠定基础。
6. Conclusion
核心贡献
- 功能扩展:超越现有生成模型,支持全球范围、多分辨率、无边界的遥感图像生成。
- 关键技术:
- 分辨率引导的自级联生成框架:实现从低分辨率到高分辨率的逐步生成。
- 创新的噪声采样策略:确保生成图像的连续性和高质量。
- 突破挑战:
- 模型容量:处理全球范围多样化地理特征的复杂需求。
- 分辨率控制:生成指定分辨率的图像,支持跨分辨率生成。
- 无边界生成:生成任意大小的连续场景。
实验结果
- 高质量图像生成:实验验证了 MetaEarth 在多分辨率、跨区域遥感图像生成上的卓越表现。
- 数据引擎潜力:生成的高质量数据在下游任务(如分类和检测)中显著提升了性能。
展望
- MetaEarth 为从俯视角度构建地球的生成式世界模型开辟了新道路。
- 它的研究成果为未来遥感和生成模型的结合提供了新的研究方向,并展示了在航空航天智能领域的广阔应用前景。



















 1289
1289

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









