







一、脉冲压缩(匹配滤波)
1、 脉冲压缩的定义
脉冲压缩技术旨在将发射的长脉冲信号经过处理后,转化为一个短脉冲信号。通过这种方法,系统能够在相同的时间间隔内实现更高的分辨率,从而更有效地识别和测量目标。
2、作用
- 提高距离分辨率:通过减小脉冲宽度,增强系统的分辨能力。
- 增强信号的抗干扰能力:通过对信号的能量聚焦,减少杂波影响。
- 提高目标检测的准确性:使得目标在噪声环境中的检测概率提高。
3、匹配滤波器设计
时域: h ( t ) = s ∗ ( − t ) h(t) = s^*(-t) h(t)=s∗(−t)
频域: H ( f ) = S ∗ ( f ) H(f) = S^*(f) H(f)=S∗(f)
二、CFAR检测
1、目的: 检测目标有无。
2、概念: CFAR检测算法属于信号检测中的自动检测算法,在雷达信号处理中主要应用的有四种,即CA-CFAR、SO-CFAR、GO-CFAR、WCA-CFAR。
3、算法介绍: 首先,指定一个距离多普勒单元,称为检测单元(CUT, cell under test),为了判断检测单元处是否存在目标,需要设定一个阈值T,当检测单元处的检测值Y大于T时,判断为有目标,否则判断为没有目标:
 具体的做法是先在测试单元的周围放置保护单元,以消除信号在测试单元周围的多余能量,然后再保护单元的周围选择参考单元:
具体的做法是先在测试单元的周围放置保护单元,以消除信号在测试单元周围的多余能量,然后再保护单元的周围选择参考单元:
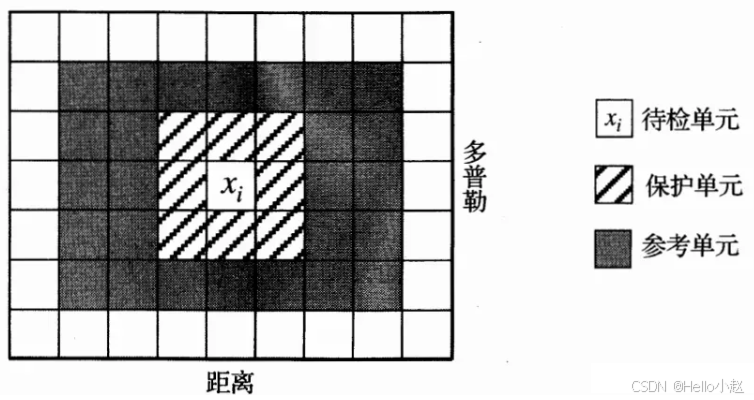
上图展示了在距离维和多普勒维同时进行恒虚警检测(CFAR)的基本原理。
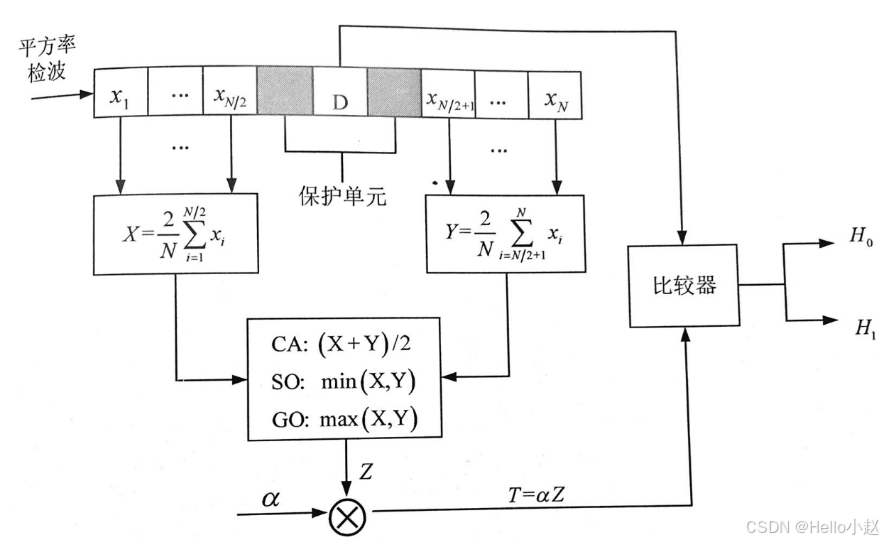
如果仅在距离维或多普勒维进行CFAR检测,则检测单元的两侧需要预先设置一定数量的保护单元和参考单元。为了自适应地确定检测门限,常用的均值类CFAR检测技术包括:
- 单元平均法(CA-CFAR):计算检测单元左右两侧参考单元的平均值,再与一个系数" α相乘(α的计算公式见下方),将结果作为门限值。若检测单元的信号幅度大于门限值,则判定为目标;否则判定为无目标。
- 两侧单元平均选大法(GO-CFAR):从左右两侧参考单元的平均值中选取较大值,作为门限值。
- 两侧单元平均选小法(SO-CFAR):从左右两侧参考单元的平均值中选取较小值,作为门限值在主瓣多目标背景下。
如果是CA-CFAR,则取左右两边的参考单元的均值再取平均值,然后与
α
\alpha
α相乘(
α
\alpha
α计算公式如下方公式),再将结果与阈值相比较。如果大于阈值则代表有目标,否则认为无目标。
三、MTI和MTD
1、MTI(动目标显示)
(1)目的: 抑制由杂波产生的类似目标的回波,而让动目标回波通过后的损失尽量小或者没有损失。
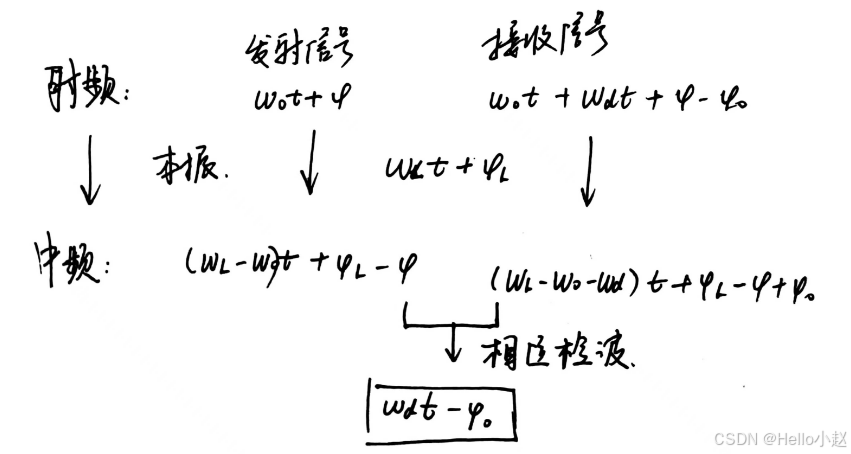
(2)中频部分进行相位检波原理:首先发射信号和接收信号都为射频信号,需要和本振进行混频下变频为中频信号,然后相位检波(混频器+低通滤波器),即下变频后的发射和接收中频信号进行混频,就得到了只包含回波频率的信号。但是回波可能是目标,也可能是杂波,如何去除杂波保留目标回波呢,使用MTI滤波器。
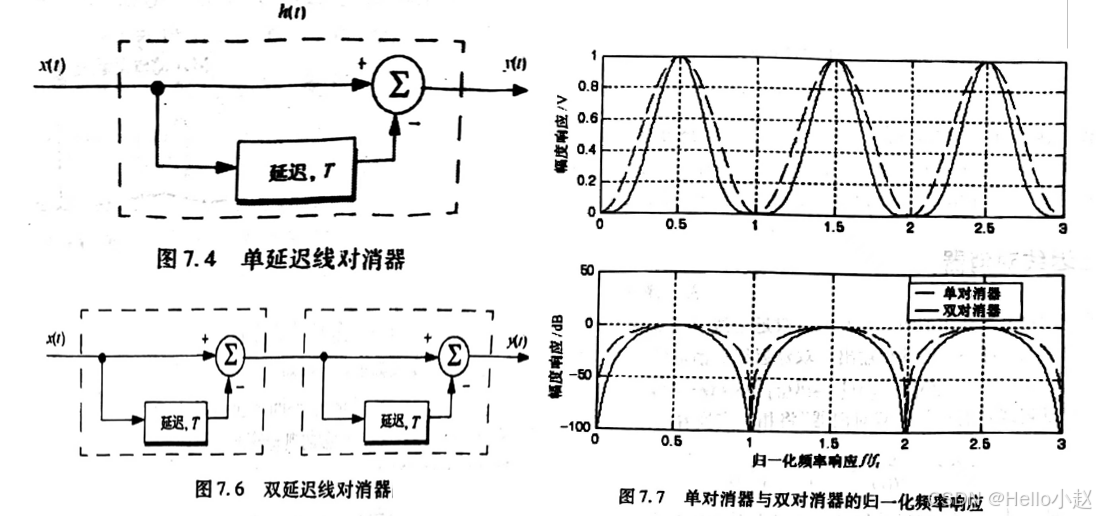
(3)MTI滤波器: 脉冲雷达系统可以利用特殊的滤波器来区分慢速运动或者静止目标与快速运动目标,这类滤波器称为动目标显示(MTI)。如下图所示,通常,杂波功率谱集中在f=0或者PRF(fr)的整数倍处,并有小范围扩展。为了有效的抑制杂波回波,MTI需要再直流和PRF整数倍处具有较深的阻带。MTI滤波器如何设计?这里介绍单延迟线对消器和多延迟线对消器。
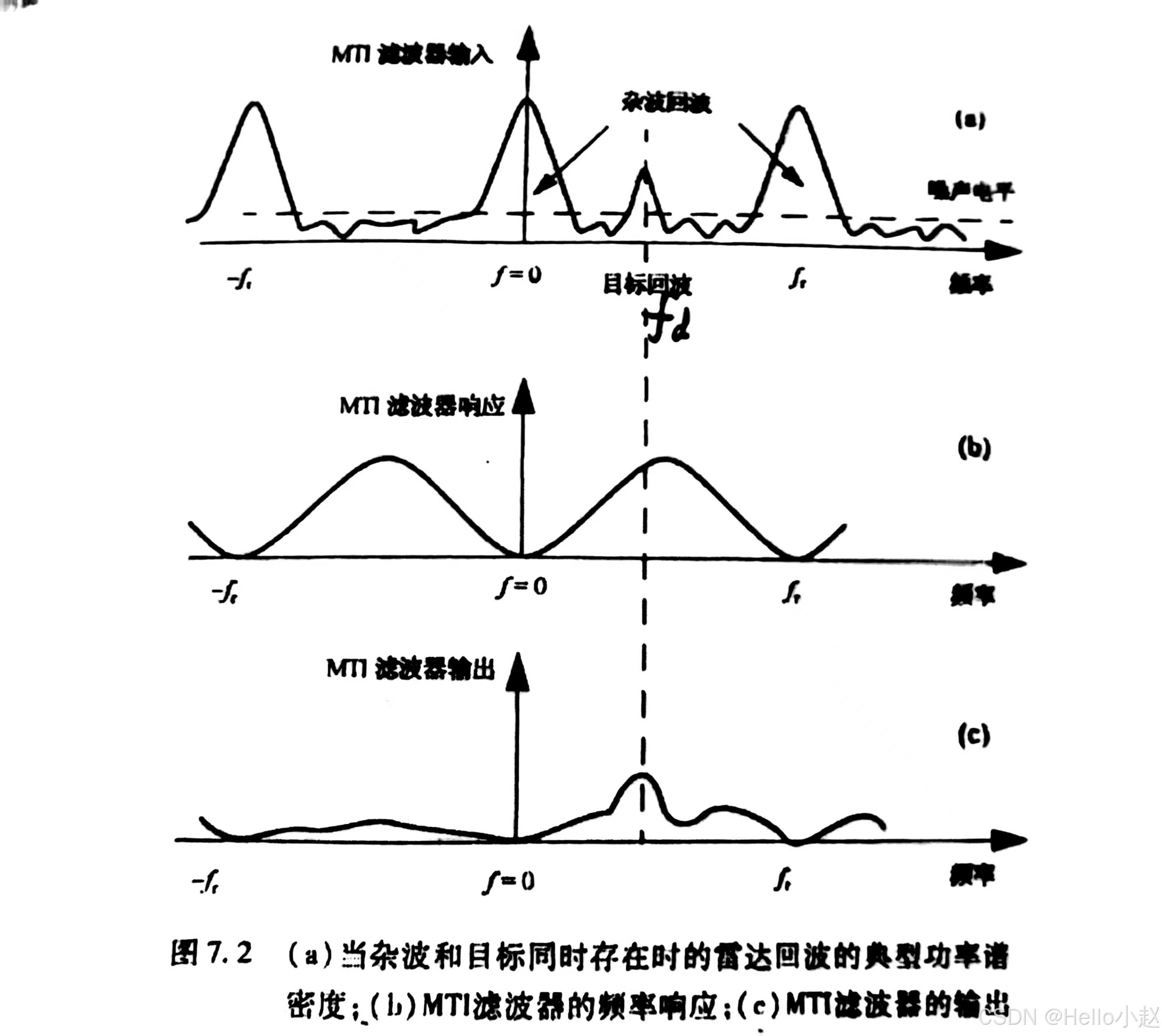
(4)单延迟线对消器和多延迟线对消器: 如图所示,加一个延迟器T(T=1/PRF) 就可以得到MTI滤波器,但是单延迟线对消器响应在阻带不具有宽的凹口,双延迟线对消器使用更为频繁。但是,我现在知道是否有目标,但是这么多目标,具体值是什么呢?使用MTD。
2、MTD(动目标检测)
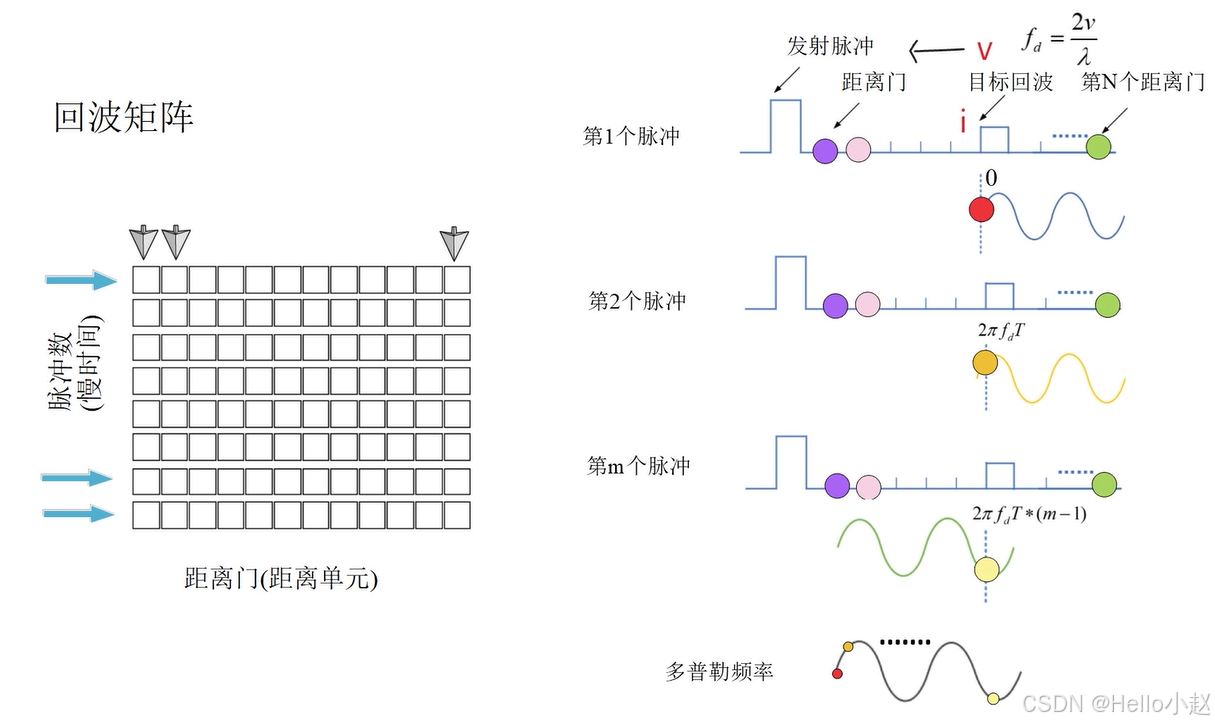
从图片可以看出,雷达的回波信号在距离门(横轴)和脉冲序列(纵轴)中形成了一个二维回波矩阵。每一行表示单个脉冲的回波信号,每一列一个PRI。通过分析每个距离单元中的信号相位变化,可以检测运动目标的多普勒频移f_d=2v/λ,其中v是目标的径向速度,λ是雷达信号波长。
参考文章
1、 脉冲压缩相关知识介绍
2、 匹配滤波相关公式推导
3、 恒虚警检测(CFAR)介绍


















 1711
1711

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









