







文章目录
前言
想给智能浮标的超声测距模块加一个云台,可以实现使其始终正对水底,不随水波干扰而晃动的功能,甚至可以实现扫描局部水域的功能。此项目不断完善中,纰漏、差错在所难免,会不断更新博文,更正错误。一、理论基础
1.姿态的描述
坐标系
常用直角坐标系。
右手系
对直角坐标系X,Y,Z轴方向的一种规定:右手食指、中指、大拇指自然张开到90°,则其分别指向X,Y,Z轴方向。
两种最重要坐标系
- 对地坐标系(GCS):取地面一点为原点,取北方为X方向,东方为Y方向,右手系原则确定地底为Z轴方向。设计这么一个坐标系的意义在于,可以假定地球是不动的,这样GCS就是固定的,其他变化的坐标系可以最后都转化到它这里进行融合。
- 机体坐标系(BCS):取机体一点为原点。右手系原则规定X,Y,Z轴方向(怎么方便怎么来)。设计这么一个坐标系的意义在于,方便进行受力分析。无人机常采用B1坐标系:机头X,右翼Y,朝下Z。
坐标系转换矩阵
我们可以通过机体坐标系进行受力分析等工作,再把它转换到对地坐标系上,获得它对地面的姿态变化。同一个点在不同坐标系下可能有不同的坐标描述,坐标转换矩阵是实现不同坐标系间坐标值快速转换的工具。
我们这样看,先看二维的情况。假定刚开始机体坐标系XOY和地面坐标系xoy是重合的。然后机体绕Z轴方向逆时针转了
θ
\theta
θ角。(逆时针符合右手定则:手握旋转轴,大拇指指向旋转轴正方向,四指握住的方向为绕此轴旋转的正方向,其实就是从此轴的正方向向负方向看时的逆时针方向)
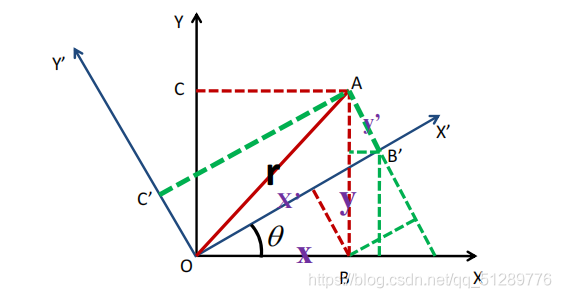
假设点A在XOY坐标系中坐标为(X,Y),在xoy坐标系中坐标为(x,y)。由三角函数关系易知,x = Xcos(
θ
\theta
θ)-Ysin(
θ
\theta
θ) , y = Xsin(
θ
\theta
θ)+Ycos(
θ
\theta
θ)
=
KaTeX parse error: Can't use function '$' in math mode at position 39: …n{bmatrix} cos($̲\theta$)& -sin(…
×
[
X
Y
]
\begin{gathered} \begin{bmatrix} X \\ Y \end{bmatrix} \quad \end{gathered}
[XY]
好家伙,不会打公式,难到了我,等Letax差不多了回来更新。
2.姿态的解算
3.舵机的控制
4.二自由度云台控制算法
5.超声测距原理
五级标题
六级标题
二、工程实践
1.引入库
代码如下(示例):
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import warnings
warnings.filterwarnings('ignore')
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
2.读入数据
代码如下(示例):
data = pd.read_csv(
'https://labfile.oss.aliyuncs.com/courses/1283/adult.data.csv')
print(data.head())
该处使用的url网络请求的数据。
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。


















 4320
4320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











