









 本文详细图解了通过CubeMX对STM32的UART1进行配置、串口通信HAL库函数使用及收发程序编写。介绍了准备工作、CubeMX配置步骤,解释发送操作函数,实现printf重定向,还给出接收代码编写方法及使用示范,适用于多种串口模块通信。
本文详细图解了通过CubeMX对STM32的UART1进行配置、串口通信HAL库函数使用及收发程序编写。介绍了准备工作、CubeMX配置步骤,解释发送操作函数,实现printf重定向,还给出接收代码编写方法及使用示范,适用于多种串口模块通信。
本篇将详细地图解:
- 通过CubeMX 对 UART1 进行配置;
- 串口通信的 HAL库函数使用;
- 收、发程序的编写;
文章目录:
前言
本篇将详细地图解:
- 通过CubeMX 对 UART1 进行配置
- HAL函数使用
- 收发程序的编写
收、发机制,使用:DMA发送 + DAM空闲中断接收。
本篇代码,适用于绝大部分的串口模块通信,如ESP8266、串口屏、蓝牙模块等。
不讲:串口通信原理 (请自行扫盲:串口通讯工作原理!)
只讲:实际使用操作;
提醒:
- STM32的USART外设,包括了:同步通信USART、异步通信UART;
- 目前常用的串口设备,基本都是使用异步通信UART,而非同步通信USART。
- 虽然使用的是UART,但称呼习惯上,网上一般都叫它“USART”。
- 本篇, 将使用“UART”作命名。
一、准备工作
1、接线
大部分的开发板(核心板除外),不管哪家的,基本都设计了USB转TTL电路。
尽管各种USB转TTL设计电路有不同,如CH340、CP2102、虚拟串口等,但是使用上是一致的。
另外 ,各板商的USB转TTL电路,一般都都会使用:UART1 (TX-PA9、RX-PA10)。
在开发板上,如果有多个USB座,找到对应的接口,插上USB线,即可完成接线操作 !

2、新建工程
为了展示如何在已有工程上添加串口功能,这里不另行新建工程。
直接使用已建立的工程,例如,使用之前已有的点灯工程:GPIO_推挽输出模式 点亮LED灯。
复制、粘贴已有的工程文件夹,修改文件夹名称,如:UART1_DMA发送+DMA空闲中断接收。
提醒:
1、只能修改工程文件夹名称,不要修改工程文件的名称,否则,CubeMX无法重新生成。
2、复制现有工程,是“新建工程"的更优操作,能延用已调试好的配置、功能代码,大幅度地减少开发时间。
相关文章传送链接:
二、CubeMX的配置
串口通信程序的代码 编写,主要分为两个部分:初始化、收发处理。
以前使用标准库,进行串口通信的代码编写,那是相当地耗时,需要不断调试排错。
CubeMX出现后, 图形化生成初始化配置,后面通过HAL库的函数调用,能轻松地实现串口通信。
在CubeMX上,初始化的配置过程,极度的简便,只需简单的几步,1分钟也用不了。
我们先双击工程文件夹中的ioc文件,打开CubeMX的工程配置 。
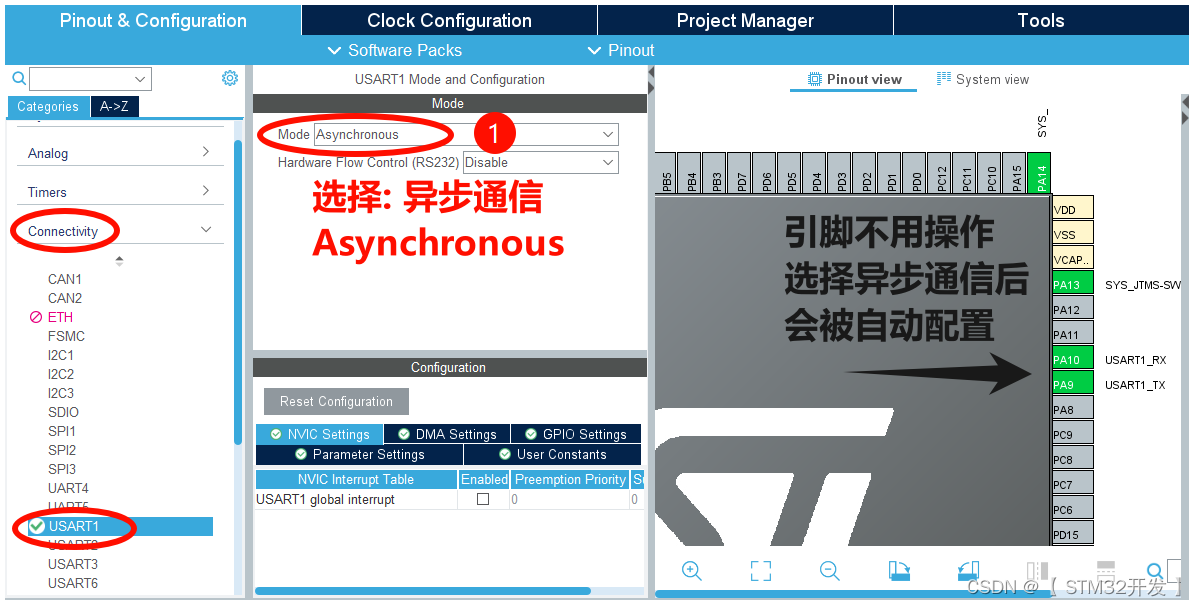
1、USART1 配置 异步通信
在选择异步通信后,将会使用默认引脚:TX-PA9, RX-PA10.
我们无需对引脚进行任何配置,CubeMX帮我们自动配置好!
2、通信协议参数
本篇,使用USART1的常用配置:115200-None-8-1。
如下图,4个主要的通信协议参数,一般只需修改波特率。蓝色的3项,基本万年不动。

3、打开DMA发送、接收
网上很多教程,只使能了USART_RX的DMA,而不使能USART_TX的DMA。
除非,TX所用的DMA通道,已被其它设备占用了,否则,你为何能容忍它躺平不干活?!

添加完成后的状态:

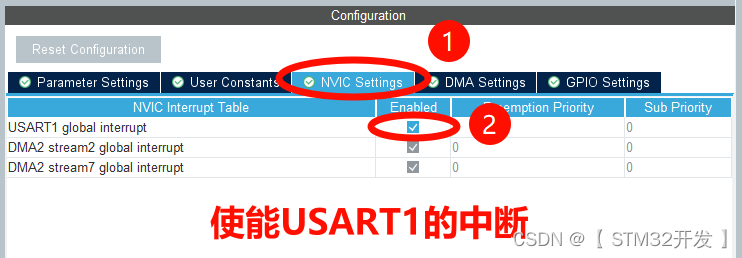
4、使能USART1中断
这一步,要记得手动打勾,不然有部分HAL函数无法使用。
5、设置RX引脚上拉
在选择异步通信后,CubeMX会自动配置引脚的工作模式。
这时的默认配置:不打开上下拉。这可能会使引脚在悬空状态时电平不确定,产生误接收。
我们把RX接收引脚,修改为:上拉(Pull-up),给引脚固定一个弱上拉,以避免悬空时产生误接收

好了,就这么简单。
中断配置, 默认就行。优先级配置,默认就行。DMA配置,默认就行。
然后,点击 GENERATE CODE,生成工程吧!
三、发送操作、代码解释
我们打开生成后的Keil工程。
在main.c文件能看到,已增加了DMA和USART1的初始化代码。

初始化部分,CubeMX都已帮我们编写好了,发送部分的底层处理、逻辑,CubeMX也编写好了。
在工程中,现在就能直接使用下面这 3个 函数,发送任何数据:
HAL_UART_Transmit (&huart1, uint8_t *pData, uint16_t Num, 超时值);
HAL_UART_Transmit_IT (&huart1, uint8_t *pData, uint16_t Num);
HAL_UART_Transmit_DMA (&huart1, uint8_t *pData, uint16_t Num);
先上板测试,后面再解释!
在/* USER CODE BEGIN 2 */ 与 /* USER CODE END 2 */ 之间,敲入以下发送代码:
/* USER CODE BEGIN 2 */
/* 用户代码,必须写在配对的BEGIN与END之间 */
static char strTem[100] = "Hello World!\r"; // 定义一个数组,也可以是其它的数据,如结构体等
HAL_UART_Transmit (&huart1, (uint8_t*)strTem, strlen(strTem), 0xFFFF); // 发送方式2:HAL_UART_Transmit(), 不推荐使用; 阻塞式发送,当调用后,程序会一直死等,不干其它事了(中断除外),直到发送完毕
HAL_UART_Transmit_IT (&huart1, (uint8_t*)strTem, strlen(strTem)); // 发送方式3:HAL_UART_Transmit_IT(), 推荐使用; 利用中断发送,非阻塞式,大大减少资源占用; 注意:当上次的调用还没完成发送,下次的调用会直接返回(放弃),所以,要想连接发送,两行调用间,要么判断串口结构体gState的值,要么调用延时HAL_Delay(ms), ms值要大于前一帧发送用时, 用时计算:1/(波特率*11*前一帧字节数)
while((&huart1)->gState != HAL_UART_STATE_READY); // 等待上条发送结束; 也可以用HAL_Delay延时法,但就要计算发送用时; 两种方法都是死等法,程序暂时卡死不会往下运行; 如果两次发送间隔时间大,如,大于100ms, 就不用判断语句了。
HAL_UART_Transmit_DMA (&huart1,(uint8_t*)strTem, strlen(strTem)); // 发送方式4:HAL_UART_Transmit_DMA(),推荐使用; 利用DMA发送,非阻塞式,最大限度减少资源占用; 注意:当上次的调用还没完成发送,下次的调用会直接返回(放弃); 所以,要想连接发送,两行调用间,要么判断串口结构体gState的值,要么调用延时HAL_Delay(ms), ms值要大于前一帧发送用时,用时计算:1/(波特率*11*前一帧字节数)
/* USER CODE END 2 */打开电脑的串口助手。
编译、烧录。串口助手马上有显示:
如果你那边,烧录后没有显示,要么是串口号错了,要么是没有打勾keil的自动复位。

下面,对3个函数的使用,逐一解释,不建议新手跳过,有避坑干货。
1、HAL_UART_Transmit (&huart1, uint8_t *pData, uint16_t Num, 超时值);
阻塞式发送。参数:串口,数据地址,发送的字节数,ms超时值
每发送一个字节,死等,好了继续发下一个,再死等,不断重复。
就是以前标准库种那最普通的死等法,只是它增加了一个超时值。
超时值:如果指定时间内没发送完毕,就直接返回,防止卡死。数据发送通信需时:
1秒 ÷ 波特率 × 字节数 × 10 × 1000ms。举例:115200波特率,100字节,大约用时 9ms。
新手如果不会计算,直接把超时值填大一点,如50ms。
2、HAL_UART_Transmit_IT (&huart1, uint8_t *pData, uint16_t Num);
利用中断发送。参数:串口,数据地址,发送的字节数
向寄存器填入一个字节,程序就继续干其它的事去,当一个字节发送完成后会产生发送中断,CubeMX生成的回调函数,自动填入下一个字节,不断重复,不用干预。
非阻塞式发送。能大大地减少程序运行时间的占用。
有一点要注意:当连续地调用本中断发送函数时,调用的间隔时间,小于通信所需的用时(按上),这时,后面那条函数调用,会直接返回,放弃发送。 因为函数内部,在发送前会判断串口的忙状态,如果在忙(还在发送上一包数据),就放弃本包数据,返回。
解决的方法,有两个:
① 最常用的,两行中断发送函数间,插入:HAL_Delay(10),原理参考上面的发送需时。
② 两行中断发送函数间,插入 while((&huart1)->gState != HAL_UART_STATE_READY); 和 HAL_Delay() 一样,都是死等,但能省了那么一点点运行时间。
3、HAL_UART_Transmit_DMA (&huart1, uint8_t *pData, uint16_t Num);
DMA发送。参数:串口,数据地址,发送的字节数。
上面的中断发送函数,100个字节,会产生100次中断。这个DMA发送函数,全程只产生一次中断。
调用后,函数给DMA数据地址,DMA就自动开始搬砖,它会把数据逐字节搬运到串口的DR寄存器上,等串口发送完这个字节了,再自动搬运下一个,过程完全不占用程序运行资源。搬完了,就产生一个中断,给程序打个招呼。通常,我们程序上,把这个“招呼”也省略了,不用理会它。
3个发送函数中,推荐使用这个DMA发送函数,发送的最优解。
同样的,两行DMA发送函数间,注意发送间隔,否则放弃发送直接返回。处理方法同上。
四、printf 重定向到USART1
约定俗成地,常使用printf函数,输出一些调试信息。它能很灵活地控制输出字符串的格式。
约定俗成地,printf 常通过 USART1 输出数据到串口助手,而非USART2、3...。
为什么要使用printf,而不直接使用上面那几个发送函数?
因为printf能控制格式!如,在字符串中插入变量值,而上面的发送函数就没它方便了;
另外 ,printf通常用于调试阶段。当调试完成了,我们无除一行行地查找和取消printf的输出,只要注释了重定向函数中的发送函数行,即可取消整个工程中的printf调试信息输出。
要使用 printf ,需要做两个事:
① 在文件头,插入: #include "stdio.h" ;
② 重定向 printf, 使它能通过 USART1 输出。
把下面代码,复制到 main.c的 BEGIN 4 与 END 4 注释行之间,即可使用。
无需打勾“Use MicroLIB"。
#include <stdio.h>
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
}; // 标准库需要的支持函数
FILE __stdout; // FILE 在stdio.h文件
void _sys_exit(int x)
{
x = x; // 定义_sys_exit()以避免使用半主机模式
}
int fputc(int ch, FILE *f) // 重写fputc函数,使printf的输出由UART1实现, 这里使用USART1
{
// 注意,不能使用HAL_UART_Transmit_IT(), 机制上会冲突; 因为调用中断发送函数后,如果上次发送还在进行,就会直接返回!它不会继续等待,也不会数据填入队列排队发送
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0x02); // 使用HAL_UART_Transmit,相等于USART1->DR = ch, 函数内部加了简单的超时判断(ms),防止卡死
return ch;
}现在,试试我们的 printf 输出效果:
在刚才敲入代码的位置,在3个发送函数之前,添加一行printf, 尝试输出系统运行时钟的值。
整体如下:
/* USER CODE BEGIN 2 */
/* 用户代码,必须写在配对的BEGIN与END之间 */
printf("\r系统运行时钟:%d MHz\r", SystemCoreClock/1000000); // 发送方式1:使用printf发送,它有灵活的格式化,很适合处理字符串; 注意:printf需要重定向fputc函数才能使用,否则程序会卡死; 本示例已重写fputc, 在main.c的底部附近
static char strTem[100] = "Hello World!\r"; // 定义一个数组,也可以是其它的数据,如结构体等
HAL_UART_Transmit (&huart1, (uint8_t*)strTem, strlen(strTem), 0xFFFF); // 发送方式2:HAL_UART_Transmit(), 不推荐使用; 阻塞式发送,当调用后,程序会一直死等,不干其它事了(中断除外),直到发送完毕
HAL_UART_Transmit_IT (&huart1, (uint8_t*)strTem, strlen(strTem)); // 发送方式3:HAL_UART_Transmit_IT(), 推荐使用; 利用中断发送,非阻塞式,大大减少资源占用; 注意:当上次的调用还没完成发送,下次的调用会直接返回(放弃),所以,要想连接发送,两行调用间,要么判断串口结构体gState的值,要么调用延时HAL_Delay(ms), ms值要大于前一帧发送用时, 用时计算:1/(波特率*11*前一帧字节数)
while((&huart1)->gState != HAL_UART_STATE_READY); // 等待上条发送结束; 也可以用HAL_Delay延时法,但就要计算发送用时; 两种方法都是死等法,程序暂时卡死不会往下运行; 如果两次发送间隔时间大,如,大于100ms, 就不用判断语句了。
HAL_UART_Transmit_DMA (&huart1,(uint8_t*)strTem, strlen(strTem)); // 发送方式4:HAL_UART_Transmit_DMA(),推荐使用; 利用DMA发送,非阻塞式,最大限度减少资源占用; 注意:当上次的调用还没完成发送,下次的调用会直接返回(放弃); 所以,要想连接发送,两行调用间,要么判断串口结构体gState的值,要么调用延时HAL_Delay(ms), ms值要大于前一帧发送用时,用时计算:1/(波特率*11*前一帧字节数)
/* USER CODE END 2 */
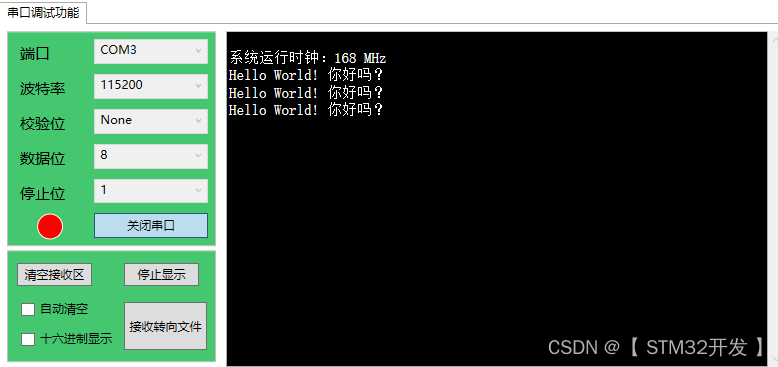
串口助手的输出效果,如下图,能正常输出了!
然后,我们来试个错,把printf这行,剪切到3个发送函数之下。再编译,烧录运行。
怎样,没有输出了吧?!
原因、解决的方法,如上面发送函数那段所述,不再重述。 这里提出,只是为了大家有更好的机制理解。
五、接收代码的编写
发送数据可以调用现成的函数,而接收数据,现成函数不太好用。
接收也有3个函数,和发送的3个函数相对应:
HAL_UART_Receive (&huart1, uint8_t *pData, uint16_t Num, 超时值);
HAL_UART_Receive_IT (&huart1, uint8_t *pData, uint16_t Num);
HAL_UART_Receive_DMA (&huart1, uint8_t *pData, uint16_t Num);
一般,大家都不使用这三个函数,太TM的难用了,有兴趣的可csdn搜它们的使用优劣分析。
我们利用HAL库现成的资源,另敲十来行代码,令串口的接收机制:更实用、更灵活。
完成后,整个接收过程,将全程自动接收,在外部判断是否收到新数据即可。
操作上共分4小项,下面将有详细操作图解:
① 定义一个结构体变量:存放接收的字节数、数据数组。
② 开启DMA:让硬件自动接收数据放到缓存
③ 重写回调函数:当一帧数据接收好了,把缓存的数据,转存到全局结构体变量里,备用。
④ 在需要使用串口接收的地方,如在while中,判断接收字节数>0, 即为接收到新一帧数据了。
1、定义一个结构体变量:存放接收的字节数、数据
① 首先,在main.h文件,新建一个结构体类型
如何打开main.h?
方法1:在main.c中,右击空白位置,弹出菜单中选择:Toggle Header/Code File
方法2:在文件树中,点击main.c左边的+号,即可看到关联的文件,双击其中的main.h。

在 /* USER CODE BEGIN ET */ 与 /* USER CODE END ET */ 之间,新建一个结构体类型。
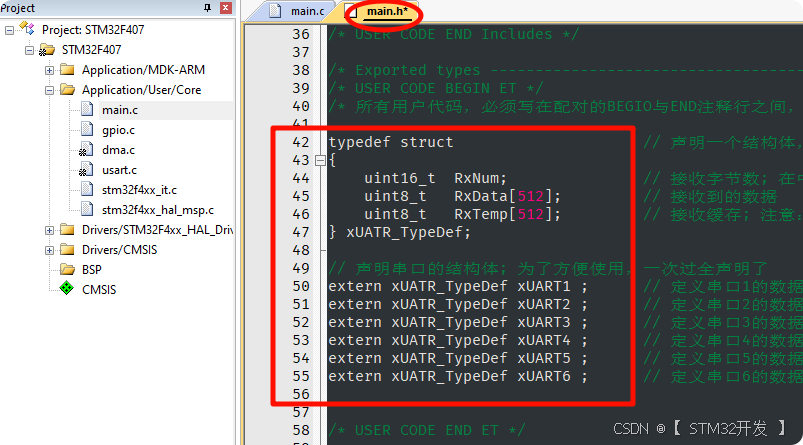
新声明的结构体类型,它有3个成员:
uint16_t RxNum; // 接收字节数,只要字节数>0,即为接收到新一帧数据
uint8_t RxData[512]; // 接收到的数据(对外使用)
uint8_t RxTemp[512]; // 临时缓存(对内作接收),在DMA空闲中断中将把其内容复制到RxData[ ]
有些网上的教程,还会有一个Flag成员变量,用作标记是否接收到数据。 无需Flag变量,直接判断 RxNum > 0 即可,更直接、清晰。
为什么要用两个缓存?双缓存结构,能增加数据处理上的时间空间,以避免单缓存在未及时处理数据时又被新的接收过程所覆盖。
另外 ,在定义结构体类型的下面一行代码中,用extern声明了一个结构体变量,它将在main.c中定义。
技巧:
- 当希望声明的结构体类型能被全局可调用,就在h文件中定义,其它文件引用这个h文件。
- 当希望定义的变量能被全局可调用,可在c文件中定义,然后在h中用extern声明,其它文件引用这个h文件。
- 上述声明结构体时用x作名称开头,这不是语法的规定,只是个人命名习惯,表示这个变量是一个结构体。
② 回到main.c,定义结构体变量
在 /* USER CODE BEGIN 0 */ 与 /* END 0 */ 之间,用刚才声明的结构体类型,定义我们的结构体变量。
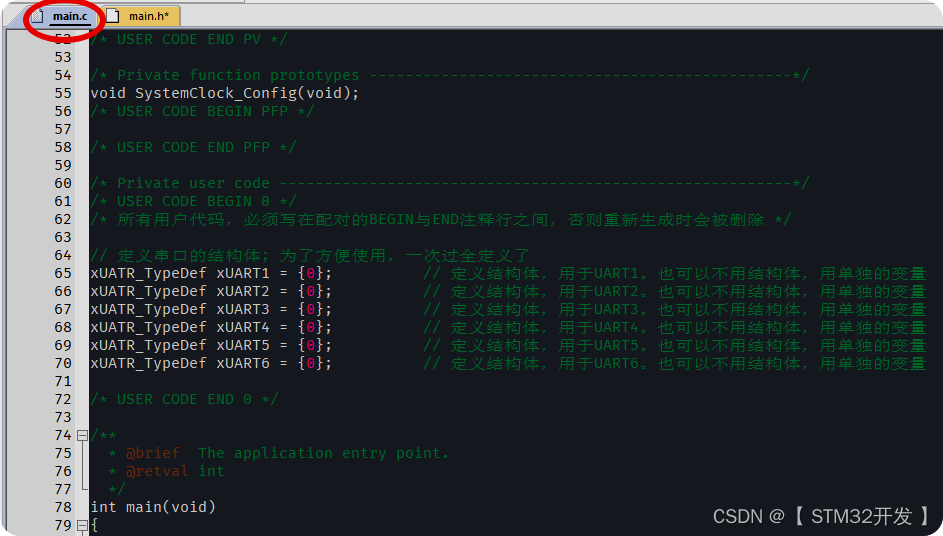
(这里同时定义了1~6的结构体变量,只是为了方便编写示例。)
现在,我们拥有一个了全局变量:xUART1。
以后的其它文件,如蓝牙模块驱动、串口屏驱动,只要在其文件中引用:main.h,就能随时通过这个结构体变量,使用串口1接收的数据了。
上述结构体的声明、定义,还有全局变量的使用方法,新手注意理解,做项目时相当好使。
2、开启DMA,让硬件自动接收数据
在main()函数的初始化部分,增加一行代码,使DMA接收开始工作:
HAL_UARTEx_ReceiveToIdle_DMA (串口、缓存、字节数) ;
参数:串口、接收缓存区、最大接收字节数
作用:使能DMA、使能串口的空闲中断,正式进入接收状态。
操作:在 main.c的 /* USER CODE BEGIN 2 */ 与 /* END 2 */ 之间,插入函数:
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.BuffTemp, sizeof(xUART1.RxTemp)); // 开启DMA空闲中断 插入后的位置,如下图:
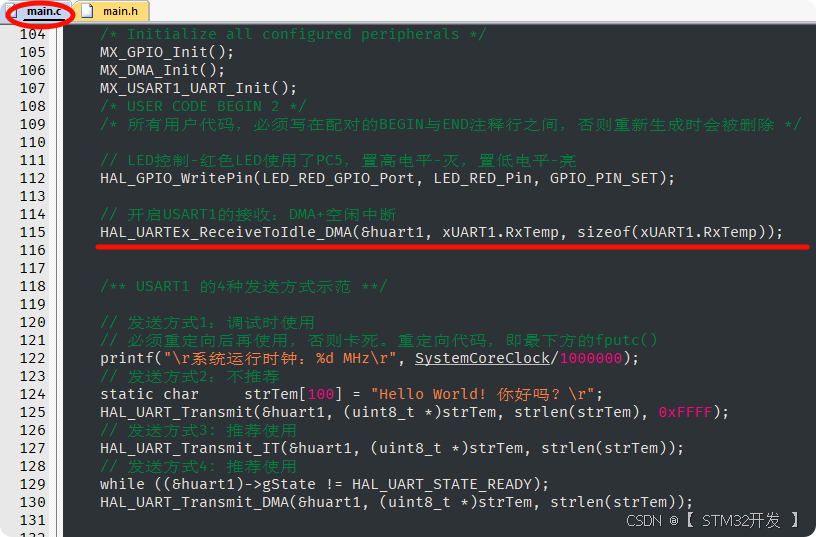
调用函数后,硬件就会立刻进入自动接收状态:从RX引脚接收到的数据,会逐个字节顺序存放到指定缓存中,这里我们指定的缓存是:xUART1.RxTemp。
因为函数内部,开启了DMA中断、空闲中断,所以达成下列两个条件之一,就会触发中断:
① DMA接收的字节数,达到了参数中的最大值
② 串口发生空闲中断,即RX引脚,超过1字节的时间,没有新信号。
当上述中断产生时,硬件自动调用其相关的中断服务函数,再继而调用回调函数。
CubeMX生成的代码,已编写好上述两个中断服务函数,还定义了一个它俩最终调用的回调函数。注意,这个回调函数是一个弱函数。
因此,我们不用管中断服务函数,只需重写这个回调函数,就能实现对接收数据的处理。
3、重写DMA空闲中断回调函数
DMA完成中断、空闲中断,所调用的回调函数:
HAL_UARTEx_RxEventCallback(串口,接收到的字节数);
这个弱函数,定义在stm32xxxx_hal_uart.c文件的底部。
不用管它!
在工程中其它位置编写一个相同名称的函数后,这个弱函数就无效了,编译时会忽略它。
现在,我们对它进行重写,以实现对接收数据的处理。
在main.c的底部,/* USER CODE BEGIN 4 */ 与 /* END 4 */ 之间,编写此函数,并编写其代码。(下面函数,可以直接复制粘贴到工程中。)
/* USER CODE BEGIN 4 */
/* 所有用户代码,必须写在配对的BEGIN与 END之间 */
/******************************************************************************
* 函 数: HAL_UARTEx_RxEventCallback
* 功 能: DMA+空闲中断回调函数
* 参 数: UART_HandleTypeDef *huart // 触发的串口
* uint16_t Size // 接收字节
* 返回值: 无
* 备 注: 1:这个是回调函数,不是中断服务函数。技巧:使用CubeMX生成的工程中,中断服务函数已被CubeMX安排妥当,我们只管重写回调函数
* 2:触发条件:当DMA接收到指定字节数时,或产生空闲中断时,硬件就会自动调用本回调函数,无需进行人工调用;
* 2:必须使用这个函数名称,因为它在CubeMX生成时,已被写好了各种函数调用、函数弱定义(在stm32xx_hal_uart.c的底部); 不要在原弱定义中增添代码,而是重写本函数
* 3:无需进行中断标志的清理,它在被调用前,已有清中断的操作;
* 4:生成的所有DMA+空闲中断服务函数,都会统一调用这个函数,以引脚编号作参数
* 5:判断参数传进来的引脚编号,即可知道是哪个串口接收收了多少字节
******************************************************************************/
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if (huart == &huart1) // 判断串口
{
__HAL_UNLOCK(huart); // 解锁串口状态
xUART1.RxNum = Size; // 把接收字节数,存入结构体xUART1.RxNum,以备使用
memset(xUART1.RxData, 0, sizeof(xUART1.RxData)); // 清0前一帧的接收数据
memcpy(xUART1.RxData, xUART1.RxTemp, Size); // 把新数据,从临时缓存中,复制到xUART1.RxData[], 以备使用
HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.RxTemp, sizeof(xUART1.RxTemp)); // 再次开启DMA空闲中断; 每当接收完指定长度,或者产生空闲中断时,就会来到这个
}
}
/* USER CODE END 4 */重点解释上面代码的后四行:
① xUART1.RxNum = Size;
把接收的字节数,存入结构体 xUART1.RxNum,以备使用 。
在程序的其它地方,判断 RxNum > 0, 就能知道是否收到新一帧数据了。
② memset(xUART1.RxData, 0, sizeof(xUART1.RxData));
清0数组中的数据,准备存入新数据
③ memcpy(xUART1.RxData, xUART1.RxTemp, Size);
把新数据,从临时缓存中,复制到xUART1.RxData[], 以备使用
从结构体和这段回调函数中,可以发现,这是一个双缓存的操作思路。
.RxData:用于存放接收后完整的一帧数据,对外使用 。
.RxTemp:用于DMA接收过程,是一个中间缓存。
④ HAL_UARTEx_ReceiveToIdle_DMA(&huart1, xUART1.RxTemp, sizeof(xUART1.RxTemp));
再次开启DMA空闲中断,进入接收状态。
我们在main()函数的初始化部分,已调用过这个函数了,为什么要在回调函数中再次调用?
因为在DMA的中断服务函数里,会关闭DMA,即只接收一次。所以,在接收完一帧后,再次调用函数,就能让DMA开始工作接收下一帧。在这个位置调用 ,能让DMA不断地循环工作。
其实,在CubeMX配置中,DMA有一个选项 :Mode的circular, 可以让DMA进行连续地的工作,接收完成后,无需在回调函数里再次开启DMA 。但是,目前的CubeMX版本(V6.10),这个参数的选择,会使我们上面的DMA接收与发送,相冲突。那我们二选一好了,自行手工调用。
注意一点:本篇的处理,是保存最后一帧数据。当有新一帧数据来了,会自动盖掉旧帧数据。
至此,接收工作已准备妥当。程序运行后,硬件、程序会自动开始接收工作,并把接收的帧数据,存放到结构体中: 最新一帧的字节数保存在xUART1.RxNum, 最新一帧的数据保存在xUART1.RxData。
4、接收的使用示范
我们来试试使用的效果吧!
① 在main.c的while函数里,判断xUART1.RxNum, 即可知道是否收到新数据。
具体操作方法如下:
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
/* 用户代码,必须写在配对的BEGIN与END之间 */
/** UART1 的接收示范(通过串口助手自发自收) **/
if (xUART1.RxNum)
{
// 获取数据
uint16_t rxNum = xUART1.RxNum; // 获取接收到的字节数
uint8_t *rxData = xUART1.RxData; // 获取接收到数据(地址)
// 输出、处理数据
printf("\r<<<<< UART1 接收到一帧数据 \r"); // 提示
printf("字节数:%d \r", rxNum); // 显示字节数
printf("ASCII : %s\r", (char *)rxData); // 显示数据,以ASCII方式显示,即以字符串的方式显示
printf("16进制: "); // 显示数据,以16进制方式,显示每一个字节的值
for (uint16_t i = 0; i < rxNum; i++) // 逐个字节输出
printf("0x%X ", rxData[i]); // 以16进制显示
printf("\r\r"); // 显示换行
// 清0接收字节数
xUART1.RxNum = 0; // 清0接收标记
}
}
/* USER CODE END 3 */
② 工程,编译,烧录!
③ 打开串口助手,参数设置 115200-None-8-1, 打开对应的串口端口。
按一下板子右下角的复位键,串口输出,如下图:

③ 在串口的发送区,输入字符串 "天气不错喔~~",或者其它数据。
点击发送:串口助手将通过PA10,发送到开发板。在程序的while函数中,那段代码判断接收到数据后,为了方便观察,将通过USART1的PA9发出数据,串口助手接收后,显示如下:

④ 试试16进制数据的发送。
发送区:打勾16进制发送,输入随意16进制值,不用加0x,用空格作间隔。
注意,16进制的值,不一定是ASCII码表的显示范围值,所以在ASCII显示中,会出现乱码,正常现象。

至此,USART1的收发,已完整地展示完毕。
如有错漏,欢迎留言指正修改~~

















 6449
6449

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









