







 本文介绍了Harris角点检测的基础知识,包括角点在图像中的特性,算法核心思想,通过计算像素值变化来识别角点的步骤,以及Harris角点检测的数学公式。还提供了一个代码实例来展示算法的应用。
本文介绍了Harris角点检测的基础知识,包括角点在图像中的特性,算法核心思想,通过计算像素值变化来识别角点的步骤,以及Harris角点检测的数学公式。还提供了一个代码实例来展示算法的应用。
1.Harris角点检测
1.1基础知识
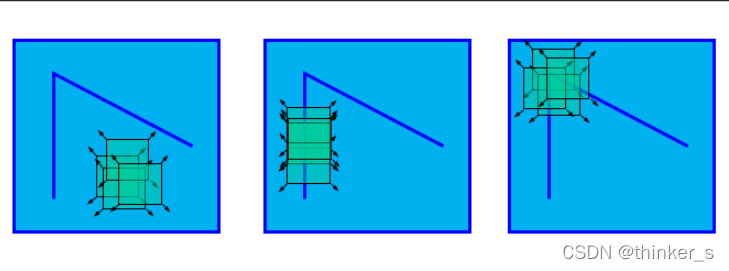
使用一个滑动窗口在下面三幅图中滑动,可以得出以下结论:
-
左图表示一个平坦区域,在各方向移动,窗口内像素值均没有太大变化;
-
中图表示一个边缘特征(Edges),如果沿着水平方向移动(梯度方向),像素值会发生跳变;如果沿着边缘移动(平行于边缘) ,像素值不会发生变化;
-
右图表示一个角(Corners),不管你把它朝哪个方向移动,像素值都会发生很大变化。
1.2算法思想
算法的核心是利用局部窗口在图像上进行移动,判断灰度是否发生较大的变化。如果窗口内的灰度值(在梯度图上)都有较大的变化,那么这个窗口所在区域就存在角点。
这样就可以将 Harris 角点检测算法分为以下三步:
- 当窗口(局部区域)同时向 x (水平)和 y(垂直) 两个方向移动时,计算窗口内部的像素值变化量 E(x,y) ;
- 对于每个窗口,都计算其对应的一个角点响应函数 R;
- 然后对该函数进行阈值处理,如果 R>threshold,表示该窗口对应一个角点特征。
1.3Harris数学公式
E ( u , v ) = ∑ x , y w ( x , y ) [ I ( x + u , y + v ) − I ( x , y ) ] 2 E(u, v)=\sum_{x, y} w(x, y)[I(x+u, y+v)-I(x, y)]^{2} E(u,v)=∑x,yw(x,y)[I(x+u,y+v)−I(x,y)]2
- [u,v][u,v]是窗口WW的偏移量;
- (x,y)(x,y)是窗口WW所对应的像素坐标位置,窗口有多大,就有多少个位置;
- I(x,y)是像素坐标位置(x,y)的图像灰度值;
- I(x+u,y+v)是像素坐标位置(x+u,y+v)的图像灰度值;
1.4代码实例
from PIL import Image
from pylab import *
from scipy.ndimage import filters
def compute_harris_response(img, sigma=3):
# 计算导数
imx = zeros(img.shape)
filters.gaussian_filter(img, (sigma, sigma), (0, 1), imx)
imy = zeros(img.shape)
filters.gaussian_filter(img, (sigma, sigma), (1, 0), imy)
# 可视化原图
plt.subplot(2 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









